
Fターム[5F031MA09]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 各装置(群)のレイアウト (190)
Fターム[5F031MA09]に分類される特許
21 - 40 / 190
搬送装置および組立装置
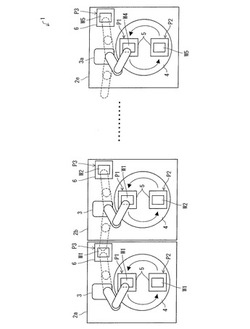
【課題】作業工程フローの変更や作業工程の増減、ワークの外形寸法の変更などの標準化されてない作業工程に対して、柔軟に対応でき、かつ、生産性(スループット)を向上できるとともに、設備の設置面積が大きくなるのを抑制できる搬送装置を実現する。
【解決手段】搬送装置1には、ワーク台6とスカラロボット3とロータリーインデックス4とを備えた搬送ユニット2a・2b・・2eが複数個備えられ、隣接する二つの搬送ユニット2a・2b中、搬送ユニット2aのワーク台6上のワークW1は、搬送ユニット2bのスカラロボット3によって、搬送ユニット2bのロータリーインデックス4上の第1の位置P1に移載され、ロータリーインデックス4上に移載されたワークW1は、第1の位置P1および/または第2の位置P2で所定工程が施され、上記所定工程が施されたワークW2を第1の位置P1から搬送ユニット2bに備えられたワーク台6上に移載する。
(もっと読む)
基板処理装置の制御方法

【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】基板を押圧する際の荷重を適切に制御し、基板同士の接合を適切に行う。
【解決手段】接合装置は、下面に上ウェハWUを吸着保持する上部チャック230と、上部チャック230の下方に設けられ、上面に下ウェハWLを載置して吸着保持する下部チャック231と、を有している。上部チャック230には、上ウェハWUの中心部を押圧する押動部材250が設けられている。押動部材250は、上ウェハWUの中心部と当接して当該上ウェハWUの中心部にかかる荷重を制御するアクチュエータ部251と、アクチュエータ部251を鉛直方向に移動させるシリンダ部252とを有している。アクチュエータ部251には、当該アクチュエータ部251に対して所定の圧力の空気を供給する電空レギュレータが設けられている。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、基板の接合面で急激に酸化が進行することを効率的に抑制する。
【解決手段】剥離装置30は、被処理ウェハWを保持する第1の保持部110と、
支持ウェハSを保持する第2の保持部111と、第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構150と、移動機構150により水平方向に移動させることで露出した被処理ウェハWの接合面WJに不活性ガスを供給する不活性ガス供給機構170と、を有している。不活性ガス供給機構170は、複数の孔が形成された平板形状の多孔質部171と、多孔質部171に接続され、当該多孔質部171に不活性ガスを供給するガス供給管172を有し、多孔質部171は、被処理ウェハWの接合面WJから鉛直方向に所定の距離離間して設けられている。
(もっと読む)
基板処理装置
【課題】枚葉処理またはバッチ処理の種類に関係なく、基板に施す一連の処理を新規な基板搬送方式により効率的かつ高スループットで行うこと。
【解決手段】この基板処理装置は、横長のプロセスステーション10をシステム中心部に配置し、その長手方向(X方向)の両端部にローダ12およびアンローダ14を連結している。プロセスステーション10は、ローダ12からアンローダ14に向かってシステム長手方向(X方向)にまっすぐ延びる搬送ライン28を有し、この搬送ライン28を挟んでその左右両側に後述する多数および多種類の処理ユニット44〜54を配置している。搬送ライン28上には、複数(図示の例では4つ)の枚葉搬送機構30,32,34,36と複数(3つ)のシャトル搬送部38,40,42とが交互に並んで一列に配置されている。
(もっと読む)
基板搬送装置及び真空処理装置
【課題】ステータ表面と永久磁石表面の間隔を縮小してリニアモータ効率を向上することができる基板搬送装置を提供する。
【解決手段】永久磁石42と駆動磁石41の間に配置され、永久磁石42が配置されている空間を真空雰囲気に、駆動磁石41が配置されている空間を大気圧雰囲気に隔てる真空隔壁45は、永久磁石42と対向する部分が大気圧雰囲気側に凸に湾曲した断面形状を有し、永久磁石42及び駆動磁石41はいずれも、真空隔壁45と所定の距離を保つように真空隔壁45と対向する部分が湾曲している。このため、真空隔壁45の最大たわみ量を小さくすることができ、永久磁石42と駆動磁石41の距離を縮めることができる。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
搬送機構、及び、それを備えた真空処理装置
【課題】ラック・アンド・ピニオンの技術を用いた縦型搬送によるインライン型の真空処理装置であって、ピニオンギヤとラックギヤが同期ずれにより、トレイに振動や衝撃を与えることなく搬送を可能にする搬送機構、及び、それを備えた真空処理装置を提供することにある。
【解決手段】複数のピニオンギヤのうち、少なくとも2つが回転してラックギヤに順次噛合することにより、該ラックギヤを現工程の処理室内に配置されるピニオンギヤから、次工程の処理室内に配置されるピニオンギヤへと受け渡して、トレイを搬送するラック・アンド・ピニオン機構、及び、それを備えた真空処理装置であって、前記ピニオンギヤをそれぞれ独立に上下移動させる上下駆動部を有していることを特徴とする。
(もっと読む)
基板処理装置
【課題】動作回数を重ねても、機構部の軸動作のズレが累積することを抑制できる基板処理技術を提供する。
【解決手段】基板処理レシピ記憶部と、当該基板処理装置を構成する機構部の原点出しを行うイニシャルレシピ記憶部と、イニシャル処理を行う基準回数を記憶するイニシャル基準記憶部と、実行済みの基板処理回数記憶部と、基板処理レシピを実行する基板処理実行部と、イニシャルレシピを実行するイニシャル処理実行部と、基板処理回数を更新する処理回数更新部と、基板処理回数記憶部に記憶した基板処理回数が、イニシャル基準記憶部に記憶した基準回数に達したか否かを判定する処理終了判定部と、イニシャル処理可能状態であるか否かを判定するイニシャル可否判定部とを備え、基板処理回数が前記基準回数に達すると当該基板処理装置における新たな基板処理開始を保留し、イニシャル処理可能状態になるとイニシャルレシピを実行するよう基板処理装置を構成する。
(もっと読む)
熱処理装置、熱処理方法及び記憶媒体
【課題】加熱板に基板を載置して熱処理するにあたり、加熱板の温度を速やかに降温すること。
【解決手段】加熱板84の下方側に加熱板84と略同じ大きさの2枚の冷却プレート81、82を水平に設け、下側の冷却プレート81は断熱部材を介して加熱板84に固定し、上側の冷却プレート82は下側の冷却プレート81に対して昇降できるように構成する。下側の冷却プレート81には冷媒流路88を設け、上側の冷却プレート82を下側の冷却プレート81に接触させて予め冷却しておき、加熱板84の温度を降温させるときには、上側の冷却プレート82を上昇させて加熱板84に接触あるいは近接させる。また、2枚の冷却プレート81、82を用いずに、冷媒流路88を備えた1枚の冷却プレートを加熱板84に接触あるいは近接させるようにしてもよい。
(もっと読む)
接合装置、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合装置700は、被処理ウェハW、支持ウェハS、重合ウェハTを受け渡すための受渡部720と、被処理ウェハW又は支持ウェハSの表裏面を反転させる反転部721と、被処理ウェハWと支持ウェハSとを押圧して接合する接合部101と、被処理ウェハW、支持ウェハS、重合ウェハTを搬送する搬送部722とを有している。反転部721は、支持ウェハS又は被処理ウェハWを保持する保持部材と、前記保持部材に保持された支持ウェハS又は被処理ウェハWを水平軸周りに回動させると共に鉛直方向及び水平方向に移動させる移動機構と、前記保持部材に保持された支持ウェハS又は被処理ウェハWの水平方向の向きを調節する位置調節機構770と、を有している。
(もっと読む)
基板処理装置
【課題】パーティクルチェック作業を短縮する。
【解決手段】基板に処理を施す複数の処理室と、前記複数の処理室のそれぞれへ前記基板を保持部に保持して搬送する第一搬送装置を備えた第一搬送室と、前記基板を大気圧状態で搬送する第二搬送装置を備えた第二搬送室と、前記第一搬送室と前記第二搬送装置とを連結する減圧可能な予備室と、前記第一搬送室と前記第二搬送装置および前記予備室に対して設けられた排気装置と、前記基板が複数収納された収納容器と前記複数の処理室との間の前記第一搬送装置および前記第二搬送装置の搬送を制御する制御手段と、を有する基板処理装置において、前記制御手段は、システムスタンバイ処理を実行する前に、前記システムスタンバイ処理で実行する項目を設定する処理選択画面を表示部に表示し、選択された前記項目のみをシステムスタンバイ処理として実行する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】 基板処理装置に於ける基板搬送ロボットの過熱を低減し、基板搬送ロボットの信頼性及び寿命の低下を抑制する。
【解決手段】 負圧下で基板が搬送される搬送室と、搬送室に接続され基板に加熱処理を施す処理室と、搬送室内に設けられ処理室内外へ基板を搬送する搬送ロボットと、搬送室の内壁を冷却する冷却部と、を備える。
(もっと読む)
デバイス製造装置および方法
【課題】デバイス製造の変種変量生産に柔軟に対応すること。
【解決手段】0.5インチサイズのウェハによる枚葉処理方式でのデバイス製造方法及び装置であって、可搬とされ、望ましくは規格化された外形を有し、製造プロセスの内の1つの処理プロセスを処理する密閉型の単位処理装置1を多数配置して製造ラインを形成し、当該デバイスの製造単位数が単位処理装置の数より多い場合には、当該デバイスの処理プロセスの順序に対応させて該単位処理装置をフローショップ方式により配置し、当該デバイスの製造単位数が単位処理装置の数と同等の場合には、該単位処理装置を工程の順序の大分類ごとにクラス分け配置したクラスショップ方式により配置し、さらに製造単位数が工程数を大きく下回る場合には、プロセス種1種類に1台程度の単位製造装置を1つのセル内に配置し、そのセルが複数で構成されるマルチセルショップ方式により配置する。
(もっと読む)
基板処理装置
【課題】基板処理装置の設置面積を増大させることなく、スループットを向上させることができる基板処理装置を提供する。
【解決手段】横方向に並べられる2つの主搬送機構T1、T2を含む基板処理列と、横方向に並べられる2つの主搬送機構T3、T4を含む基板処理列とを上下に設けている。各主搬送機構T1、T2、T3、T4には基板Wを処理する複数の処理ユニットが設けられている。そして、各階層の基板処理列において、主搬送機構Tが対応する処理ユニットに基板Wを搬送しつつ横方向に隣接する他の主搬送機構Tに基板Wを受け渡す。これにより、各基板処理列で並行して基板Wに一連の処理を行う。よって、基板処理装置の処理能力を向上させることができる。また、基板処理列を上下に設けているので、基板処理装置の設置面積が増大することを回避することができる。
(もっと読む)
ウェハ収納装置、ウェハ収納方法、及びウェハ研磨装置
【課題】研磨後の多数枚のウェハを効率的に省スペースで水没させて保管し、また、ウェハの表面にウォータマークが形成されず且つ傷がつかないウェハ収納装置を提供する。
【解決手段】水槽5の水面より上部に置かれたカセット4を水平にし、且つリンス機構9のノズルバー9aをカセット4の後部へ移動して、研磨後のウェハ3をカセット4に上下方向多段に個別に効率よく収納する。全てのウェハ3がカセット4に収納されたら、傾斜手段8によってカセット4を1°〜20°の範囲で傾斜させ、ノズルバー9aによってウェハ3の表面にリンス水を噴射させる。次に、カセット昇降機構7によって、カセット4を水槽5の内部の水中へウェハ1枚分の間隔で沈める。カセット4を水槽5から引き上げるときも、傾斜手段8によってカセット4を傾斜させながら引き上げる。これにより、ウェハ3が傷ついたりウォータマークが形成されることなく、効果的にウェハ3の収納・洗浄・搬送を行える。
(もっと読む)
真空処理装置
【課題】設置面積あたりの生産性が高い半導体製造装置を提供する。
【解決手段】大気搬送室の背面側に並列に連結された第一と第二のロック室と、前記第一のロック室の後方側でこれと連結された第一の搬送室と、この第一の搬送室の後方側でこれと連結された第二の搬送室と、前記第二のロック室の後方側でこれと連結された第三の搬送室と、前記第一の搬送室と第二の搬送室及び第一の搬送室と第三の搬送室との間に配置されウエハがこれらの間で受け渡される第一及び第二の中継室と、前記第一,第二または第三の搬送室に連結された複数の処理室とを備え、前記第二の搬送室に連結された処理室の数が前記第一または第三の搬送室に連結された処理室の数よりも大きく、前記第二の中継室で前記第一または第二の搬送室に連結された処理室で処理された前記ウエハのみが前記第三の搬送室に受け渡される。
(もっと読む)
基板搬送ロボット
【課題】基板が損傷しない基板搬送ロボットを提供する。
【解決手段】第一、第二の従動アーム22a,22bによって回転され、互いに歯合した第一、第二の規制ギア25a,25bに対し、それぞれ歯合する第一、第二のピニオンギア32a,32bを設け、第一、第二のピニオンギア32a,32bでピニオンギア用ラック41を挟む。ハンド23が放射方向外側から内側に向けて移動し、ハンド23が搬送室内に位置する状態では、ピニオンギア用ラック41は放射方向外側に移動し、緩衝部材を介して基板15を押圧し、基板15をクランプする。ハンド23が放射方向外側に移動し、処理室内に位置するときは、ピニオンギア用ラック41は放射方向内側に移動し、クランプは解除される。搬送室内でクランプされているので高速移動が可能である。
(もっと読む)
基板位置決め装置、基板処理装置、基板位置決め方法及びプログラムを記録した記憶媒体
【課題】回転軸に対し円形基板の中心の位置決めを正確に行うことのできる基板位置決め装置を提供する。
【解決手段】基板30の位置決めを行うための基板位置決め装置において、基板載置部44と、前記基板の側面に接触する第1の基準部11を有する第1の位置決め機構部10と、前記基板30の側面に接触する第2の基準部21を有する第2の位置決め機構部20と、前記第1の位置決め機構部10を駆動させる第1の駆動部13と、前記第1の駆動部13を制御する制御部50と、を有し、前記第2の基準部21は、前記基板30と接触部24において接触するものであって、前記接触部24に対し前記駆動部13の移動方向に力を加えることのできる弾性部と、前記位置決め機構部20の位置情報を検出するための検出部28とを有する。
(もっと読む)
21 - 40 / 190
[ Back to top ]