
Fターム[5H115PI16]の内容
車両の電気的な推進・制動 (204,712) | 車両への電力供給 (26,397) | 車両の内部に電力供給源があるもの (15,723) | 電池によるもの (12,219) | 二次電池を用いるもの (9,293)
Fターム[5H115PI16]に分類される特許
101 - 120 / 9,293
充電管理サーバ、充電管理システム、充電管理方法および充電管理プログラム
【課題】
電気自動車に搭載される蓄電池への充電を行う充電スタンドの管理を図る。
【解決手段】
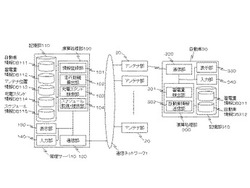
本実施形態の充電管理サーバは、自動車を運転するドライバーの最終目的地までの移動経路を含むスケジュール情報を取得し提供するスケジュール情報取得・提供部と、アンテナを介して通知される前記自動車の自動車情報、蓄電量情報と、前記アンテナの位置から前記自動車の走行可能距離を算出する走行距離算出部と、前記走行可能距離と前記移動経路を比較して前記最終目的地まで到達できない場合は、前記移動経路および前記走行可能距離から前記自動車が充電することができる充電スタンドを検索し、充電時間を算出し、前記充電スタンドおよび前記充電時間に関する情報を前記自動車へ提供する充電スタンド検索部と、を備える。
(もっと読む)
車輪駆動装置

【課題】空走状態における電力消費を低減できるようにした車輪駆動装置を提供する。
【解決手段】電動モータ11と、電動モータの回転を減速し、トルク増大して駆動車輪12に伝達する遊星ギヤ機構13と、遊星ギヤ機構のリングギヤ22の回転を自由状態または固定状態にするクラッチ機構14と、通常はリングギヤを固定状態に保持し、車両の空走時を検出してリングギヤの回転を自由状態にするようにクラッチ機構を制御するクラッチ制御手段40とを有する。クラッチ制御手段は、例えば、電動モータによって駆動される電動モータ冷却用ポンプより吐出される冷却オイルの圧力、あるいは電動モータとは別に設けたモータによって駆動されるねじ機構によって駆動される。
(もっと読む)
電力変換装置
【課題】電源と負荷との間で絶縁を確保しながら電力供給を行いつつ、負荷に高すぎる電圧が供給されることを防ぐことが可能な電力変換装置を得る。
【解決手段】電力変換装置101は、入力電圧を分圧して分圧電圧を生成する分圧回路11と、分圧電圧を第1の直流電圧に変換する昇圧回路12と、分圧電圧を第2の直流電圧に変換する昇圧回路13と、第1および第2の直流電圧を負荷202に供給する電力伝達用絶縁回路14とを備え、電力伝達用絶縁回路14は、キャパシタC5と、スイッチ素子Q3,Q4を含み第1の直流電圧をキャパシタC5に供給する入力スイッチ部21と、スイッチ素子Q5,Q6を含み第2の直流電圧をキャパシタC5に供給する入力スイッチ部22と、スイッチ素子Q7,Q8を含みキャパシタC5に蓄えられた電力を出力する出力スイッチ部23とを含む。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
車両および車両の制御方法
【課題】外部充電が可能な車両において、充電時間の遅延が生じた場合の要因を事後的に認識可能とする。
【解決手段】車両100は、充電が可能な蓄電装置110と、外部電源500からの電力を用いて蓄電装置110を充電するための充電装置200と、ECU300とを備える。ECU300は、蓄電装置110に供給することができる最大供給電力および蓄電装置110に実際に供給された充電電力に基づいて、最大供給電力で充電を行なった場合の充電電力に対する不足量によって生じる充電時間の遅延量を演算するとともに、遅延が生じた遅延要因に関する情報を記憶する。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
電動車両の制御装置
【課題】車速を調整するアクセル機構に車両の前進および後進の両方の機能を持たせて操作性を容易にすることができる電動車両の制御装置を提供する。
【解決手段】通常可動域α1と微速可動域α2とでアクセル操作を可能にする。非アクセル操作時にスロットル開度を最小開度側に戻すスロットルバネを有する。スロットル開度に応じてモータを駆動する駆動部を有する。スロットルバネは微速可動域α2の中間位置である微速基準開度SL0までアクセルグリップを付勢してスロットル開度を小さくする。微速可動域α2では、微速基準開度SL0を基準にスロットル開度が大きい領域α2Fでは電動車両を微小車速で前進させる一方、微速基準開度SL0を基準にスロットル開度が小さい領域α2Rでは電動車両を予定の微小車速で後進させるように駆動部にモータ駆動指令を供給する微速制御部を備える。
(もっと読む)
電気自動車の電源供給
【課題】電気自動車が走行中または、停車中に充電する事ができる、充電方法を提供する。
【解決手段】電気自動車の本体1に、道路面高さ測定装置2を設置する。走行中または停車中に電気を受け取ることができる電気受け取り装置3を設置する。電気受け取り装置3を道路面高さ測定装置2の信号により道路表面との距離を一定に保つための、上下移動装置4を設置する。電気受け取り装置3により受け取られた電気を使用できる電気に変換するため、電気変換供給装置5を設置する。変換された電気はバッテーリー6に供給される。電気自動車の本体1が走行する道路上に電気供給装置7を一定間隔を空けて連続的に設置する。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
車載用電気システム
【課題】複数の駆動装置を有する電気回路において共用する部品を備えるものにおいて、高度な制御を不用として、複数の駆動装置の作動時に発生し得る共用部品への干渉を回避可能とする車載用電気システムを提供する。
【解決手段】車載用電気システムにおいて、制御部150は、複数の駆動部131、132によって複数の電動機141、142を同時に駆動させる際に、第1電動機141用の電圧信号における第1キャリア周波数fpwm1に対して、第2電動機142用の電圧信号における第2キャリア周波数fpwm2が同一となるとき、第2キャリア周波数fpwm2を第1キャリア周波数fpwm1に対して異なる値に設定して、駆動部131、132を制御するようにする。
(もっと読む)
自動車
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
エンジン始動方法及びエンジン始動装置
【課題】ハイブリッド車両において、エンジンを始動させる際の消費電力量を低減する。
【解決手段】エンジン始動方法は、可変動弁機構(116)を有するエンジン(11)と、エンジンを始動する際にエンジンをクランキングする回転電機(12)と、エンジンが完爆した後も回転電機がエンジンのクランキングを継続する場合に、エンジンの吸入空気量を増量するように可変動弁機構を制御する制御手段(20)と、を備えるハイブリッド車両(1)におけるエンジン始動方法である。該エンジン始動方法は、可変動弁機構による吸入空気量の増量の程度に応じて、回転電機に係るクランキングトルクを減量するトルク減量工程を含む。
(もっと読む)
車輪給電装置
【課題】車載バッテリから電磁給電部を経て車輪内蔵モータへ電力を供給する際、車体側DC/ACコンバータを駆動輪数よりも少なくし、別電源の簡易化を実現し得るようになす。
【解決手段】強電バッテリ21から電磁給電部21L,21Rを経て左右駆動輪内蔵モータ4L,4Rへ電力を供給する給電システムにおいて、電磁給電部21L,21Rの第1コイル14L,14Rは、相互に接続した後、共通な給電回路25により強電バッテリ21に接続し、共通な給電回路25中に、共通な車体側のDC/ACコンバータ26を挿入する。DC/ACコンバータ26を強電バッテリ21の直近に配置して、DC/ACコンバータ26よりも強電バッテリ21から遠い箇所で給電回路26に降圧用DC/DCコンバータ27および充電器29を接続し、降圧用DC/DCコンバータ27と給電回路25との接続部に絶縁トランス35を介在させ、充電器29と給電回路25との接続部に絶縁トランス36を介在させる。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、加速側で切り替えレスポンスの向上を達成しながら、コースト減速中の切り替えに伴う捩れショックの発生を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、遅れ処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、モータトルク差分に対し、アクセル踏み込みによる加速側では、加速要求に適合する加速用変化量制限値によりモータトルク変化の遅れ処理を行なう。一方、アクセル足離しによるコースト減速中のときには、加速用変化量制限値よりも小さい値に設定したコースト用変化量制限値によりモータトルク変化の遅れ処理を行なう。
(もっと読む)
接近報知装置
【課題】歩行者の安全を確保することができる接近報知装置を提供する。
【解決手段】地域判定手段24Aは、自車位置が、接近を報知すべき接近報知地域に該当するか否かを判定する。時間帯判定手段24Bは、時刻情報生成部16によって検出された現在時刻が、接近報知地域に関連付けられた接近報知時間帯に該当するか否かを判定する。制御手段24Cは、地域判定手段24Aおよび時間帯判定手段24Bの双方の判定結果が肯定であるという条件が成立したときに接近報知手段を作動させる。
(もっと読む)
電気システム並びに電動車両及びハイブリッド自動車
【課題】電気駆動車両に適用してモータの出力増大、加速性能の向上、運動エネルギーの回収率向上、走行エネルギーの低減を図るものである。
【解決手段】入力端子の一方と出力端子の一方とを共通端子とした出力電圧反転形電流双方向昇降圧チョッパ8の前記共通端子を直流電源1の一方の端子に、前記チョッパの他方の入力端子を前記直流電源の他方の端子に接続するとともに、前記直流電源の前記他方の端子と前記チョッパの出力端子の前記他方の端子との間に負荷を接続し、前記チョッパを制御して前記負荷の電圧を前記直流電源の電圧以上にできるようにした。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機の変速種により判別される走行シーンに対応し、走行シーン毎に異なる要求性能を達成すること。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、自動変速機3と、モータトルク変化処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機3の変速種により判別される走行シーンが、駆動力レスポンスが要求される走行シーンであるほど大きな値のトルク変化率を選択し、ショック低減が要求される走行シーンであるほど小さな値のトルク変化率を選択し、モータトルク差分を、選択したトルク変化率で変化する目標モータトルクにより繋ぐ。
(もっと読む)
101 - 120 / 9,293
[ Back to top ]