
Fターム[5H115PU10]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | 電動機 (9,664) | 交流電動機 (5,920) | 同期電動機 (1,694)
Fターム[5H115PU10]に分類される特許
21 - 40 / 1,694
ハイブリッド車両およびその制御方法
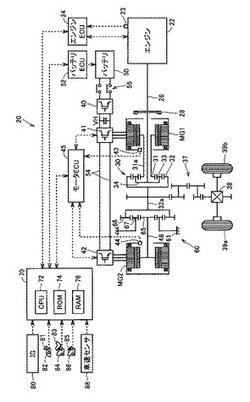
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
車両の制御装置

【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EV走行領域を拡大する。
【解決手段】動力源としてエンジン1及びモータ2を備えるハイブリッド車両100の制御装置であって、エンジン1の廃熱を回生動力として回生する廃熱回生装置6と、モータ2のみを動力源として走行するEV走行時に、廃熱回生装置6によって回生した回生動力をエンジン1の出力軸13に伝達する回生動力伝達機構(11,12,663)と、を備える。これにより、EV走行時に廃熱回生装置6によって回生した回生動力によってエンジン1の出力軸を空回しさせておくことができる。そのため、モータ2によるクランキングを行うことなくエンジン1を自立始動させることが可能となり、EV走行中にエンジン再始動のための余力を残しておく必要がない。したがって、モータ2のみによって走行できる領域を増大させることができる。
(もっと読む)
半導体素子装置
【課題】半導体素子群からの受熱による基板の損傷の抑止と基板の製造に用いる材料の節約とを図る。
【解決手段】冷却器80側から順に第1層52,62,72,第2層54,64,74,第3層56,66,76の三層からなる基板50,60,70の第1層52,62,72の厚みを、対応する半導体素子群41a,42a,46aで想定される最大発熱量が小さいほど薄くなるよう形成する。これにより、半導体素子群41a,42a,46aからの受熱による基板50,60,70の損傷の抑止と基板50,60,70の製造に用いる材料の節約とを図ることができる。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
インバータの制御装置及びインバータの制御方法並びに自動車
【課題】複数のインバータをキャリア周波数拡散制御する場合に、キャリア周波数の重なりによって生成される合成音による騒音レベルが大きくなるのを抑制する。
【解決手段】通常用いる周波数fset11,fset21を拡散周波数fspr1,fspr2としたときにキャリア周波数範囲fext1,fext2の重なりの程度が所定範囲以上のときには、拡散周波数fspr1,fspr2として周波数fset11,fset21の2倍の周波数fset12,fset22を用いて実行用キャリア周波数f1*,f2*を設定し(S140)、この実行用キャリア周波数f1*,f2*の変調波を用いたパルス幅変調制御によってインバータのスイッチング素子をオンオフ制御する。これにより、電磁音の合成音が生成されても、合成音の騒音レベルを小さくして、騒音レベルが大きくなるのを抑制することができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両の走行中に内燃機関の始動に伴うショックの発生を抑制すると共に運転停止されていた内燃機関をより適正に始動させる。
【解決手段】エンジンの運転停止中におけるエンジンの始動判定に際して要求走行パワーと比較される始動判定パワーPref1は、当該始動判定パワーPref1をリングギヤ軸のトルクに換算することにより得られる換算始動判定トルクTc1が車速Vが高いほど小さくなるように設定され、エンジンの始動判定に際して要求トルクと比較される始動判定トルクTref1は、車速Vが間欠禁止車速Vrefよりも低い基準車速V0以下であるときに換算始動判定トルクTc1以下となると共に車速Vが基準車速V0を上回っているときに換算始動判定トルクTc1よりも大きくなるように設定される。
(もっと読む)
電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法
【課題】蓄電装置からの電力を用いて走行することが可能な車両の電源システムにおいて、不適切な蓄電装置が接続されているか否かを検出することによって、機器の劣化や故障を抑制する。
【解決手段】負荷装置180に電力を供給するための電源システム105は、蓄電装置と、電圧センサ111と、電流センサ112と、ECU300とを備える、ECU300は、検出された電圧および電流に基づいて蓄電装置の内部抵抗値を演算するとともに、演算された内部抵抗値を予め定められた基準値と比較することによって、蓄電装置が、正規の蓄電装置110とは異なる蓄電装置110Aを含んでいるか否かを判定する。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
ハイブリッド車両用電動モータ駆動装置及び該装置を備えたハイブリッド車両
【課題】 簡単かつ安価で軽量コンパクトな構成でありながら、既存の自動二輪車等の車両の動力伝達系に対して変更を伴うことなく、良好に電動モータの出力を駆動力として作用させることができるハイブリッド車両を提供する。
【解決手段】 本発明に係るハイブリッド車両は、内燃機関2と電動モータ20とを動力源として備えるハイブリッド車両1であって、電動モータ20により車輪11に駆動力を付与する電動モータ駆動装置10が、車輪11の車軸と略平行な回転軸廻りに回転可能に構成され、少なくとも1つの車輪11の外周付近に当接する駆動ローラ15と、駆動ローラ15を駆動する電動モータ20と、を含んで構成されることを特徴とする。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】内燃機関の出力軸が回転しているときにギヤ機構のギヤ間のガタをつめるための押し当てトルクを出力するよう電動機を制御する押し当て制御を解除条件の成立に応じてより適正に解除する。
【解決手段】エンジン22の出力軸としてのクランクシャフト26が回転しているときに、ギヤ機構60(プラネタリギヤ30、減速ギヤ35,ギヤ列61,デファレンシャルギヤ62)のギヤ間のガタをつめるための押し当てトルクTpを出力するようモータMG2を制御する押し当て制御が実行される。そして、押し当て制御の実行中に予め定められた第1および第2押し当て制御解除条件のうちの少なくとも一つが成立したときに、成立した押し当て制御解除条件に応じた第1または第2の緩変化処理を伴って押し当てトルクTpが値0に設定される。
(もっと読む)
電気自動車
【課題】イグニッションオフ時のコンデンサの電荷をより適正な態様で処理する。
【解決手段】イグニッションオフされたときにおいて、処理モードとしてバッテリ優先モードが設定されているときには、充電条件が成立していることを条件としてリレーがオンの状態でコンデンサの電荷を昇圧コンバータを介してバッテリに充電する充電制御を実行し(S120〜S140)、その後に、空調条件が成立していることを条件としてリレーがオフの状態でコンデンサの電荷を昇圧コンバータを介して用いて空調装置のコンプレッサを駆動する空調制御を実行する(S150〜S200)。一方、処理モードとして空調優先モードが設定されているときには、空調条件が成立していることを条件として空調制御を実行し(S220〜S270)、その後に、充電条件が成立していることを条件として充電制御を実行する(S300〜S320)。
(もっと読む)
ハイブリッド自動車
【課題】ブレーキ操作を検出するセンサ等に異常が生じブレーキ操作を適切に検出することができないときでもアクセル操作とブレーキ操作とが同時に行なわれているのをより確実に判定する。
【解決手段】ブレーキフェール中であると判定されたときには、アクセル開度Accが閾値Aref以上であり且つ回転数変化量ΔNが負の値として定められた閾値Nref未満であるか否かを判定し(S150,S160)、アクセル開度Accが閾値Aref以上であり且つ回転数変化量ΔNが閾値Nref以上であるときにアクセルペダル83とブレーキペダル85とが同時に踏み込まれたアクセルブレーキ同時操作と判定する(S170)、これにより、ブレーキフェール中であってもより確実にアクセルブレーキ同時操作を判定することができる。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の発生の抑制と車室内の騒音や振動の抑制との両立を図る。
【解決手段】騒音振動抑制制約運転ポイントでエンジンが運転されると共に要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する通常制御を実行するとギヤ機構を介して駆動軸に接続されたモータから出力されるトルクの絶対値が閾値Tref以下となるときには(S170)、そのモータから出力されるトルクが閾値Trefより大きなトルクTsetとなり、エンジンが騒音振動抑制制約運転ポイントより高回転低トルク側で要求パワーPe*を出力する運転ポイントで運転され、要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する(S180〜S230)。
(もっと読む)
ハイブリッド自動車
【課題】ドライバビリティの悪化をより抑制しながら電動機の発熱を抑制する。
【解決手段】アクセル開度が大きいほど大きくなる傾向で且つシフトポジションがRポジションのときにDポジションのときより同一のアクセル開度に対して絶対値が小さくなる傾向の要求トルクが駆動軸に出力されるようエンジンと二つのモータとを制御しながら駆動軸が回転停止しているときには、アクセル開度が大きいほど大きくなる傾向で且つシフトポジションがRポジションのときにDポジションのときより小さくなる傾向に減少レートRtを設定する(S100〜S120)。そして、設定した減少レートRtでモータからのトルクが小さくなるようモータのトルク指令を設定してモータを制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
電気自動車
【課題】電気自動車において航続距離を長くする。
【解決手段】バッテリ11と走行用モータ13とインバータ12と警告表示装置18とを備え、バッテリ11の電力によって走行用モータ13を駆動して走行する電動自動車100であって、走行用モータ13の要求電力またはバッテリ11の出力電力を制限し、警告表示装置18の表示を入り切りする制御部50を備え、制御部50は、バッテリ11の残存容量(SOC)が所定の容量よりも少ない場合には、走行用モータ13の要求電力を制限する要求電力制限手段と、バッテリ11の残存容量(SOC)が所定の容量を超える場合には、バッテリ11の出力特性に応じてバッテリ11の出力電力を制限する出力電圧制限手段と、走行用モータ13の要求電力の制限又はバッテリ11の出力制限が行われている場合に、制限状態を警告表示装置18に表示する警告表示手段と、を備える。
(もっと読む)
ハイブリッド車両
【課題】気筒間空燃比ばらつき異常の検出精度を確保する。
【解決手段】多気筒内燃機関および電動機と、内燃機関の気筒間空燃比ばらつき異常を検出する検出手段と、車両を内燃機関および電動機の両方で駆動させるハイブリッド(HV)モードおよび車両を内燃機関のみで駆動させるエンジンモードを実行可能な制御手段とを備える。制御手段は、HVモードのとき所定の動作線b1上を内燃機関の実際の動作点c11が移動するよう内燃機関および電動機を制御し、HVモード実行中に所定の変更要求があったとき動作線をb2に変更してエンジンモードに移行し、且つHVモード実行中にばらつき異常検出が未実行または実行中であるとき動作線の変更およびエンジンモードへの移行を禁止してハイブリッドモードを維持する。
(もっと読む)
21 - 40 / 1,694
[ Back to top ]