
Fターム[5H115SE05]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | エンジン (1,876)
Fターム[5H115SE05]に分類される特許
21 - 40 / 1,876
車両の動力伝達制御装置
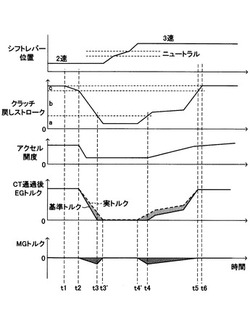
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】ハイブリッド車両の走行中に内燃機関の始動に伴うショックの発生を抑制すると共に運転停止されていた内燃機関をより適正に始動させる。
【解決手段】エンジンの運転停止中におけるエンジンの始動判定に際して要求走行パワーと比較される始動判定パワーPref1は、当該始動判定パワーPref1をリングギヤ軸のトルクに換算することにより得られる換算始動判定トルクTc1が車速Vが高いほど小さくなるように設定され、エンジンの始動判定に際して要求トルクと比較される始動判定トルクTref1は、車速Vが間欠禁止車速Vrefよりも低い基準車速V0以下であるときに換算始動判定トルクTc1以下となると共に車速Vが基準車速V0を上回っているときに換算始動判定トルクTc1よりも大きくなるように設定される。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の車速制限制御時において、より適切にエンジン運転状態を制御する。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行速度を、ステアリングスイッチ28で設定されたリミッタ車速以下で維持するように自動調整する制御であるASL制御を行っているときに、アクセルペダル33の操作に応じたドライバ要求トルクと、車速制限時の駆動トルクである車速リミッタトルクとのセレクトローによって決定される目標駆動トルクから逆算して求められる擬似アクセル開度VAPOに基づき、エンジン1を始動するか又は停止するかのいずれかの判定を行う。
(もっと読む)
ハイブリッド車両用電動モータ駆動装置及び該装置を備えたハイブリッド車両
【課題】 簡単かつ安価で軽量コンパクトな構成でありながら、既存の自動二輪車等の車両の動力伝達系に対して変更を伴うことなく、良好に電動モータの出力を駆動力として作用させることができるハイブリッド車両を提供する。
【解決手段】 本発明に係るハイブリッド車両は、内燃機関2と電動モータ20とを動力源として備えるハイブリッド車両1であって、電動モータ20により車輪11に駆動力を付与する電動モータ駆動装置10が、車輪11の車軸と略平行な回転軸廻りに回転可能に構成され、少なくとも1つの車輪11の外周付近に当接する駆動ローラ15と、駆動ローラ15を駆動する電動モータ20と、を含んで構成されることを特徴とする。
(もっと読む)
レンジエクステンダ
【課題】コンバータやチョッパ等の電力制御装置を用いることなく発電機出力を制御するレンジエクステンダを提供する。
【解決手段】ガスタービンGTの駆動により発電機を作動させ、発電機の出力を車両の駆動系に供給するレンジエクステンダであって、予め設定された目標発電機出力PDCset、タービン回転数N1、大気温度N0、大気圧力P0、及び燃料流量Gfとの関係を示すマップに基づいてガスタービンへ供給する燃料流量Gfを決定するECU10を備える。
(もっと読む)
シリーズハイブリッド車両の制御装置
【課題】エンジンと発電機とバッテリと駆動モータとを備えたシリーズハイブリッド車両の制御装置において、高燃費を維持しつつ、アクセル開度に応じてエンジン回転数を上げて運転者にエンジン音上昇による加速感を与えることにある。
【解決手段】制御手段(10)は、アクセル開度検出手段(11)により検出されたアクセル開度に基づいて目標エンジン回転数を決定し、アクセル開度検出手段(11)により検出されたアクセル開度が最小である時に発電効率が最大となるエンジン回転数を目標エンジン回転数とするとともに、アクセル開度検出手段(11)により検出されたアクセル開度が最大である時には出力が最大となるエンジン回転数を目標エンジン回転数とする。
(もっと読む)
ハイブリッド自動車
【課題】電動機に接続されたギヤ機構での異音の発生の抑制と車室内の騒音や振動の抑制との両立を図る。
【解決手段】騒音振動抑制制約運転ポイントでエンジンが運転されると共に要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する通常制御を実行するとギヤ機構を介して駆動軸に接続されたモータから出力されるトルクの絶対値が閾値Tref以下となるときには(S170)、そのモータから出力されるトルクが閾値Trefより大きなトルクTsetとなり、エンジンが騒音振動抑制制約運転ポイントより高回転低トルク側で要求パワーPe*を出力する運転ポイントで運転され、要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する(S180〜S230)。
(もっと読む)
パラレル式ハイブリッド車両走行制御装置
【課題】ドライバの違和感が解消され、しかも、燃費向上の効果が大きくできるパラレル式ハイブリッド車両走行制御装置を提供する。
【解決手段】エンジン回転速度が回生下限値以上回生上限値未満で、かつ、ドライバ要求トルクと回生可能トルク最大値の加算値が好適熱効率トルク下限値を超えているとき、前記加算値がエンジン熱効率最大のトルク上限値を超えていれば、トルク上限値をエンジン目標トルクとして設定し、前記加算値がエンジン熱効率最大のトルク上限値以下であれば、前記加算値をエンジン目標トルクとして設定し、そのときのエンジン発生トルクからモータ回生トルクを取り出してバッテリ4を充電しつつ走行する充電走行を行うエネルギマネジメント部5を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンが逆回転するのを抑制することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、クラッチ同期制御手段と、トルク制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。クラッチ同期制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、エンジンの始動前に、第1回転電機のトルクに基づきクラッチ同期制御を行う。トルク制限手段は、クラッチ同期制御中に、エンジンに伝達される第1回転電機のトルクが、エンジンの摩擦トルク以下になるように制限する。
(もっと読む)
ハイブリッド車両の充電量制御装置
【課題】ハイブリッド車両の走行開始前に空調装置を作動させる場合でも、そのときにエンジンを始動して空調装置の作動用の電気エネルギーを生成する必要性を低下させる。
【解決手段】充電量制御装置は、学習処理において、走行前空調運転を行う場所として登録場所を記録し、当該登録場所で走行前空調運転を行う前に当該登録場所で車両を駐車する時刻を登録時刻Bとして記録する。また、車両が当該登録場所を含むエリアの外から中に入ったことに基づいて、当該登録時刻Bを含む制御対象時間帯を算出し、車両が当該エリアの外から中に入った進入時刻が、当該制御対象時間帯内に入っているか否かを判定し(320、330、340)、入っていると判定した場合、バッテリの充電量が第1範囲内に収まるよう制御されている状態から、バッテリの充電量が第1範囲内よりも上限および下限が大きい第2範囲内に収まるよう制御する(350)。
(もっと読む)
ハイブリッド車両
【課題】気筒間空燃比ばらつき異常の検出精度を確保する。
【解決手段】多気筒内燃機関および電動機と、内燃機関の気筒間空燃比ばらつき異常を検出する検出手段と、車両を内燃機関および電動機の両方で駆動させるハイブリッド(HV)モードおよび車両を内燃機関のみで駆動させるエンジンモードを実行可能な制御手段とを備える。制御手段は、HVモードのとき所定の動作線b1上を内燃機関の実際の動作点c11が移動するよう内燃機関および電動機を制御し、HVモード実行中に所定の変更要求があったとき動作線をb2に変更してエンジンモードに移行し、且つHVモード実行中にばらつき異常検出が未実行または実行中であるとき動作線の変更およびエンジンモードへの移行を禁止してハイブリッドモードを維持する。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
航続距離延長装置
【課題】簡素な構成で高効率に航続距離を延長可能な航続距離延長装置を提供する。
【解決手段】レンジエクステンダ1は、モータジェネレータ30と、エンジン20と、燃料貯留部40と、燃料供給部と、を備える。モータジェネレータ30は、バッテリ10の充電量が不足した場合にバッテリ10を充電可能である。エンジン20は、モータジェネレータ30を駆動する。燃料貯留部40は、エンジン20に供給される燃料を貯留する。燃料供給部は、燃料貯留部40に貯留された燃料をエンジン20に供給する。エンジン20に供給される燃料は、気体燃料であるDMEを含む。DMEは、ガソリンや軽油と比較して気化しやすいので、比較的簡素な構成で燃料供給部を構成することができる。
(もっと読む)
車両およびその制御方法
【課題】ノーマルモードおよびパワーモードのいずれかを運転者が選択可能に構成された車両において、運転者の意図しない駆動力が発生するのを抑制する。
【解決手段】車両は、第1の走行モードと、同一アクセル操作量に対する車両駆動力が第1の走行モードよりも大きい第2の走行モードとのいずれかを運転者により選択可能に構成される。車両は、運転者からの第2の走行モードへの切換え要求を検知するための検知手段と、切換え要求が検知された場合に、第1の走行モード時と比較して車両駆動力を増大させることにより、車両を第2の走行モードへ切換えるための切換え手段と、切換え要求が検知された場合に、車輪のロック状態を検出するためのロック検出手段と、車輪のロック状態が検出されたときには、切換え手段による第2の走行モードへの切換えを禁止するための禁止手段とを備える。
(もっと読む)
ハイブリッド自動車
【課題】リバース走行する際に第1の電動機にロック故障が生じていないことを確かめた上でリバース走行を許可し、第1の電動機にロック故障が生じているときにリバース走行することによって内燃機関が逆回転して破損するのを防止する。
【解決手段】運転者がシフトレバーをリバース走行用のポジション(Rポジション)に変更したときにモータMG1からエンジンをクランキングする方向のトルクを出力し(S110)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至ったときにはモータMG1にロック故障が生じていないと判断してリバース走行を許可し(S160)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至らないときにはモータMG1にロック故障が生じていると判断してリバース走行を禁止する(190)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン動作点の移動及び機械式変速機構の変速制御を同時に行う際、燃費の悪化を抑制しつつ好適な変速を実現する。
【解決手段】第2電動機回転速度NMG2が上昇から下降に転じた後に第2電動機回転速度NMG2が自動変速機18の変速後における第2電動機回転速度NMG2と同期するまでの間は一時的に、エンジン回転速度NEの低下勾配を零にするので、エンジン回転速度NEの目標値を跨ぐ吹き上がり方がどれだけばらついても、エンジン回転速度NEの低下勾配のばらつきが確実に回避される。従って、エンジン回転速度NEの低下勾配が一時的に零とされている期間での自動変速機18の変速制御を安定して実行することができる。また、第2電動機回転速度NMG2の同期後にエンジン回転速度NEを目標回転速度に向かって低下させる制御を単独で実行することができ、目標回転速度への収束時間のばらつきが抑制される。
(もっと読む)
21 - 40 / 1,876
[ Back to top ]