
Fターム[5H115SE08]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 動力伝達装置 (2,547) | 変速機 (1,094)
Fターム[5H115SE08]に分類される特許
81 - 100 / 1,094
ハイブリッド車両の駆動制御装置
【課題】内燃機関を停止させる際に内燃機関が共振することを抑制可能なハイブリッド車両の駆動制御装置を提供する。
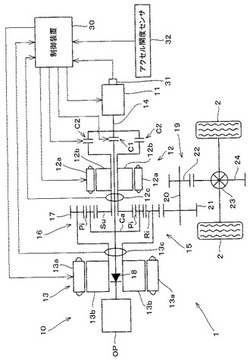
【解決手段】キャリアCaに第1クラッチC1を介して内燃機関11が連結され、サンギヤSuに第1MG12が連結され、リングギヤRiに第2MG13が連結された遊星歯車機構16を備え、第1MG12が第2クラッチC2を介して内燃機関11と連結された車両1に適用され、駆動制御装置は第1クラッチC1を係合状態にするとともに第2クラッチC2を解放状態にして内燃機関11及び第2MG13を駆動源とするシリーズパラレルモードから第1クラッチC1を解放状態にし、内燃機関11を停止させて第2MG13を駆動源とするEVモードに切り替える場合、まず第1クラッチC1を解放状態に切り替え、次に第2クラッチC2を係合状態に切り替え、その後第1MG12で内燃機関11の回転数を低下させて内燃機関11を停止させる。
(もっと読む)
車両用駆動制御装置

【課題】車両の急減速時に同期が不完全なまま噛合クラッチを接続することにより、異音が発生したり噛合クラッチが損傷したり或いは駆動力変動が生じたりすることを防止する。
【解決手段】噛合クラッチ42が遮断されたエンジン走行手段72による車両走行時に車速Vが低下し、駆動力源切換マップPmap に従って定められた接続車速以下になった場合でも、車両の減速度が所定値以上の急減速時には、ステップR3の噛合クラッチ接続制御の実行が阻止されて噛合クラッチ42が遮断状態に維持される。これにより、車両の急減速時に同期が不完全なまま噛合クラッチ切換アクチュエータ48により噛合クラッチ42を接続しようとして、異音が発生したり噛合クラッチ42が損傷したり或いは駆動力変動が生じたりすることが防止される。
(もっと読む)
車両駆動装置のための制御装置
【課題】内燃機関、摩擦係合装置、回転電機の順に設けられた車両駆動装置において、摩擦係合装置のスリップ制御時にトルク増幅制御も可能とする。
【解決手段】摩擦係合装置12の伝達トルク容量を決定するトルク容量決定部と、摩擦係合装置の入出力速度比に基づいて、1以上の値となるトルク増幅率を導出するトルク増幅率導出部と、トルク容量決定部により決定された伝達トルク容量と、増幅率導出部により速度比に基づいて決定されたトルク増幅率とを用い、伝達トルク容量にトルク増幅率を乗算した値から伝達トルク容量を減算した値に基づいて、回転電機の出力トルクの指令値を決定するトルク指令値決定部とが備えられる。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】ハイブリッド車両のエネルギー効率を向上させる。
【解決手段】駆動装置10にはエンジン11とモータジェネレータ12とが設けられる。エンジン11とモータジェネレータ12との間には一方向クラッチ24が設けられ、エンジン11からモータジェネレータ12に向けて動力が伝達される一方、モータジェネレータ12からエンジン11に向かう動力は遮断される。これにより、エンジン11を引き摺らずにモータジェネレータ12を作動させることができ、エネルギー効率を高めることが可能となる。また、モータジェネレータ12にはトルクコンバータ13が接続され、トルクコンバータ13とエンジン11とは始動用クラッチC2を介して連結される。これにより、一方向クラッチ24を設けた場合であっても、モータジェネレータ12をスタータモータとして機能させることができ、駆動装置10の低コスト化を達成することができる。
(もっと読む)
液圧発生装置及び駆動装置
【課題】装置全体の大型化を抑制しつつポンプ駆動軸の支持精度を適切に確保することが可能な液圧発生装置を実現する。
【解決手段】ポンプケース21,22は、ポンプ駆動軸35を相対回転可能に径方向に支持する突出部30を備え、2つのワンウェイクラッチ41,42のそれぞれの内輪が互いに一体化されて共通内輪43を形成しており、2つのワンウェイクラッチ41,42のそれぞれの外輪41a,42aは、互いに独立に形成されているとともに互いに異なるポンプ駆動部材によりそれぞれ駆動され、さらに共通内輪43に対する相対回転が規制される当該相対回転の方向が互いに同一とされ、共通内輪43は、ポンプ駆動軸35に連結される連結部44と、連結部44から軸第二方向L2側へ延び、突出部30に対して径方向外側にあって当該突出部30と同じ軸方向位置となる部分を有する本体部45とを備える。
(もっと読む)
変速制御装置
【課題】変速プロセスにおいて、油圧制御が十分に応答できるように、回生トルク変動を規制することができる変速制御装置の提供。
【解決手段】駆動力源制御ユニットによってトルク出力が制御される回転電機から入力部材に入力される正トルク及び負トルクを算定する入力トルク算定部65と、負トルクの負方向への増加量を制限する負トルク増加量制限値を設定する負トルク制限値設定部64と、変速プロセスの間に入力トルク算定部65によって負トルクが算定された場合、回転電機が負トルク増加量制限値によって制限されたトルクを出力するように駆動力源制御ユニットに対してトルク出力制限指令を与える変速時トルク管理部63とを備える。
(もっと読む)
自動変速機の変速制御方法および変速制御装置
【課題】発電により自動変速機に入力される走行トルクが減少しても良好な車両走行性能および良好な変速フィーリングが得られ、変速制御装置の記憶部や演算処理部の負担の増加を抑制できる自動変速機の変速制御方法を提供する。
【解決手段】エンジンと発電電動機と自動変速機と変速制御装置とを備えたハイブリッド車両用パワートレイン装置で、エンジンからの駆動により車両の走行と発電電動機の発電とを並行して実施するときの自動変速機の変速制御方法であって、発電電力に必要な発電トルクを演算する工程S5と、エンジンの出力トルクを演算する工程S6と、出力トルクから発電トルクを減算して車両の走行に使用される走行トルクを演算する工程S7と、走行トルクに基づいて補正した発電時スロットル開度を演算する工程S8と、発電時スロットル開度に基づいて自動変速機を制御する変速制御工程S9と、を有する。
(もっと読む)
ハイブリッド車
【課題】内燃機関の浄化触媒を暖機する際に、運転者の加速要求により適正に対応する。
【解決手段】浄化触媒の暖機要求がなされたときにおいて、差分パワーΔPrが判定用パワーC1を超えているときには(ステップS170)、要求パワーPr*と冷却水温Twと差分パワーΔPrが判定用パワーC1以下であるときに用いられる第1補正係数設定用マップより補正係数Tarpeを大きくなる傾向に設定する第2補正係数設定用マップとを用いて補正係数Tarpeを設定し(ステップS190)、基本開度Tatrqに補正係数Tarpeを乗じたものを目標スロットル開度TH*に設定し(ステップS200)、エンジンのスロットルバルブの開度を目標スロットル開度にした状態でエンジンを運転しながら要求パワーPr*に基づくパワーにより走行するようエンジンと2つのモータとを制御する(ステップS210〜S250)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行中、モータ走行モードによる走行領域を拡大し、回生エネルギーの回収量向上と燃費の向上を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジンENGと、モータジェネレータMGと、プライマリプーリ31と、セカンダリプーリ32と、第1クラッチCL1と、第2クラッチCL2と、エンジン始動制御手段(図6)と、を備える。エンジン始動制御手段(図6)は、モータ走行モードからのエンジン始動時、第2クラッチCL2を開放してプライマリプーリ31およびセカンダリプーリ32をモータジェネレータMGから切り離した状態で、第1クラッチCL1を締結し、プライマリプーリ31およびセカンダリプーリ32に蓄積されたエネルギーを使ってエンジンENGを始動する。
(もっと読む)
作業車両
【課題】走行安定性の向上、製造コストの低減、変速性能の向上、ミッドマウント対地作業機25の揚げスペース確保等を簡単に達成できるようにした作業車両を提供しようとするものである。
【解決手段】前輪6及び後輪7にて走行自在に支持された走行機体2に、対地作業機25,31を装設する作業車両において、原動機5を搭載した走行機体2の前部に変速機8を配置し、原動機5の動力が変速機8を介して前輪6に伝達されるように構成したものである
(もっと読む)
制御装置
【課題】第一係合装置の解放状態で第二係合装置をスリップ状態に制御する際に、第二係合装置のスリップ状態を早期にかつ適切に実現できる制御装置の実現。
【解決手段】入力部材Iと出力部材Oとを結ぶ動力伝達経路上に、第一係合装置CS、回転電機12、及び第二係合装置C1、の順に設けられた駆動装置1を制御対象とする制御装置3。第一係合装置CSの解放状態における、当該第一係合装置CSの引き摺り抵抗に起因するロストルクの推定値である推定ロストルクを導出するロストルク推定部47と、第一係合装置CSの解放状態で第二係合装置C1をスリップ状態に制御する特定スリップ制御を実行する場合に、第二係合装置C1の伝達トルク容量が回転電機12の出力トルクと推定ロストルクとの差分として決定される推定入力トルクに応じた容量となるように第二係合装置C1への供給油圧を設定する特定スリップ時油圧制御部45bと、を備える。
(もっと読む)
ハイブリッド車の発電制御装置
【課題】所望の時間内に所定の充電率まで充電することができるハイブリッド車の発電制御装置を提供する。
【解決手段】エンジンとモータとを動力源とするハイブリッド車において、エンジンにより発電機を駆動し、発電機により発電した電気をバッテリに充電する際、エンジン及び発電機によるバッテリへの充電の開始後、パドルシフトの「+」レバーが押されたとき、発電時間を加算する設定を行い(S23→S24)、パドルシフトの「−」レバーが押されたとき、発電時間を減算する設定を行い(S23→S25→S26)、いずれも押されない場合、前回の発電時間を保持する設定を行い(S23→S25→S27)、設定した発電時間でバッテリへの充電を行う。
(もっと読む)
車両用駆動装置
【課題】電動機側と車輪側との動力伝達の応答遅れを抑制可能な車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、車両の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と車輪側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bと油圧ブレーキ60A、60Bとを制御するECUと、電動機2A、2Bと車輪との動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられ、電動機側の順方向の回転動力が車輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が車輪側に入力されるときに非係合状態となり、車輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに車輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向クラッチ50を備える。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】悪路走行における走破性を十分に確保できる車両用動力伝達装置の制御装置を提供する。
【解決手段】悪路走行時制御手段98は、車両6が悪路走行を行うと悪路走行判断手段92によって判断された場合には、悪路走行判断手段92によって車両6が悪路走行を行うと判断されない場合よりも動力伝達装置10の動力伝達効率η1を低下させるように自動変速部20の変速段を選択する前記悪路走行時変速制御を実行する。従って、車両6の悪路走行時には、エンジントルクTEの増大が蓄電装置56の充電制限により制限されるという状況が生じ難くなるので、十分な大きさのエンジントルクTEが得られ、車両6の悪路走行における走破性を十分に確保できる。
(もっと読む)
変速制御装置
【課題】回生トルクがかかっている際の掛け替え変速において発生しうる戻し変速における変速ショックを回避する技術の実現。
【解決手段】第1の変速段から第2の変速段への変速指令があった後、第1の変速段へ戻す戻し変速指令があった場合に、変速プロセスの進行による入力部材の回転速度の変化が所定の回転変化しきい値未満の範囲では、駆動力源の負方向の出力トルクの絶対値が所定の判定しきい値以上である負トルク状態であることを条件として、第1の変速段への戻し変速プロセスが禁止される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、クラッチを用いた動力伝達モードの切替えを好適に行う。
【解決手段】ハイブリッド車両の制御装置(100)は、第1電動機(MG1)、第2電動機(MG2)及び内燃機関(200)を含む動力要素と、駆動軸(500)と、第1回転要素(S1)、第2回転要素(R1)、第3回転要素(C1)を有する動力伝達機構(300)と、第1クラッチ(710)と、第2クラッチ(720)とを備えたハイブリッド車両を制御する。ハイブリッド車両の制御装置は、第1クラッチ及び第2クラッチを制御する切替手段(160)と、第2クラッチを結合させる第1制御手段(120)と、内燃機関の回転数を推定する回転数推定手段(130)と、推定された回転数が所定の閾値未満である場合に、内燃機関が起動していない状態で第1クラッチを結合させる第2制御手段(140)とを備える。
(もっと読む)
車載動力伝達装置
【課題】動力循環を生じるものを利用することで、CVT22に要求される耐量が大きくなること。
【解決手段】動力分割機構20は、1の遊星歯車機構にて構成される。動力分割機構20のサンギアSには、CVT22を介してモータジェネレータ10が機械的に連結されるとともに、CVT22、クラッチC1、ギアG2α,G2βを介してキャリアCに機械的に連結されている。また、リングギアRには、ギアG5,G6およびディファレンシャルギア24を介して駆動輪14に機械的に連結されている。こうした構成において、クラッチC1を締結状態とすることで、サンギアSおよびキャリアC間で動力循環が生じる。駆動輪14を反転させる場合、モータジェネレータ10の回転方向を反転させる。
(もっと読む)
車両用駆動装置の制御装置
【課題】無段変速機および有段変速機を共に変速する場合でもそれ等の変速が何れも適切に行われるようにする。
【解決手段】無段変速機16を構成している差動機構24の2つの回転要素RE1、RE3の回転速度、すなわちエンジン回転速度NeおよびMG2回転速度NMG2を制御量として、それ等の最終目標値Nem、NMG2mに向かうように変速中の過渡目標値Net、NMG2tが逐次設定され、エンジン回転速度Ne、MG2回転速度NMG2が過渡目標値Net、NMG2tに近付くように第1モータジェネレータMG1、第2モータジェネレータMG2のトルクTMG1、TMG2がフィードバック制御される。変速過渡時のエンジントルクTeの変化や有段変速機20の摩擦係合装置の係合トルクの変化、両変速機16、20の変速の相互干渉などは外乱としてフィードバック制御に反映され、両変速機16、20の変速が何れも適切に行われるようになる。
(もっと読む)
車両用動力伝達装置
【課題】遊星歯車機構を利用してエンジンの減速比と電気モータの減速比を制御する技術において、エンジンの減速比と電気モータの減速比の対応関係を可変とする。
【解決手段】エンジン1の発生する動力が第1遊星歯車機構Peのキャリアに入力され、モータMGの発生する動力が第2遊星歯車機構Pmのサンギアに入力され、第1遊星歯車機構Peのリングギアおよび第2遊星歯車機構Pmのキャリアからの動力を結合して車両の駆動輪の車軸に伝達し、エンジン1の動力が第1遊星歯車機構Peのキャリアに入力される状態を保ちながら、第1遊星歯車機構Peのサンギアの回転を第1クラッチC1、第2クラッチC2、第1ブレーキB1のいずれかで規制し、また、モータMGの動力が第2遊星歯車機構Pmのサンギアに入力される状態を保ちながら、第2遊星歯車機構Pmのリングギアの回転を第2ブレーキB2、第3クラッチC3のいずれかで規制する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動/停止制御と自動変速機の変速制御のうち、一方の制御中に他方の制御要求があったとき、ショックを防止するだけでなく、ラグ・燃費への跳ね返りを最小限に抑えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、モータ/ジェネレータMGと、第1クラッチCL1と、自動変速機ATと、統合コントローラ10と、ATコントローラ7と、エンジン/変速協調制御手段(図6)と、を備える。エンジン/変速協調制御手段は、エンジン始動/停止制御と自動変速機ATの変速制御のうち、一方の制御中に他方の制御要求があったとき、要求タイミングで他方の制御を開始してもショックが許容値を越えない場合、要求タイミングで他方の制御を開始し、要求タイミングで他方の制御を開始するとショックが許容値を越える場合、他方の制御を許可できるタイミングまで待って他方の制御を開始する。
(もっと読む)
81 - 100 / 1,094
[ Back to top ]