
Fターム[5H180CC12]の内容
Fターム[5H180CC12]に分類される特許
4,681 - 4,700 / 4,855
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
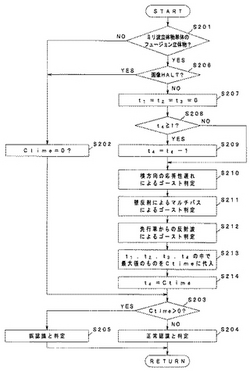
車両用運転支援装置

【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車両の減速制御装置
【課題】前車との位置関係を適正にするために、運転者の減速意思に応答して、減速制御を行なうものであって、前車が減速しているときに、適度な減速度が得られる車両の減速制御装置を提供する。
【解決手段】車両と前記車両の前方の前車との位置関係を適正にするために前記車両の運転者の減速意思が検出されたときに前記車両の減速制御を行う車両の減速制御装置であって、前記前車が減速しているときに、前記前車の減速度301に対応する値に基づいて求められた目標減速度304に基づいて、前記車両の減速制御が行われる。前記前車の減速度に対応する値は、前記前車の減速度と、前記前車と前記車両の車間距離に基づいて、決定されることができる。
(もっと読む)
移動体監視装置、移動体監視システム、移動体監視方法および移動体監視プログラム
【課題】 演算機能、速度計測機能等の高度な機能を有する必要がなく、軽量で、コンパクトで、しかも安価な移動体を監視することが可能であって、かつ、演算量を少なくすることにより負荷を少なくした移動体監視装置等を提供すること。
【解決手段】 複数の移動体のそれぞれの移動体に関する位置情報および移動体を特定するための移動体識別情報を含む移動体情報を受信する手段と、受信した移動体情報に基づいて、位置情報における移動体の移動速度および移動方向を含む速度ベクトルを算出する手段と、速度ベクトルに基づいて、移動体が所定範囲内の他の移動体と衝突する可能性を示す衝突危険度を算出する手段と、衝突危険度が所定値以上の場合、移動体に対して、他の移動体と衝突する可能性が高い旨を送信する手段と、衝突危険度が所定値以上の場合、他の移動体に対して、移動体が衝突する可能性が高い旨を送信する手段とを備える。
(もっと読む)
ミラー制御装置
【課題】 各ドライバにとって適切な量だけミラーを自動的に駆動可能なミラー制御装置を提供すること。
【解決手段】 ミラー制御装置1において、障害物位置導出部12は、車両の周囲に存在する障害物の位置を導出する。また、視点位置導出部13は、車両のドライバの視点の位置を導出する。角度導出部14は、障害物位置導出部12で導出された障害物の位置と、視点位置導出部13で導出された視点位置とから、ミラー2の角度を導出する。ミラー角度調整部15は、角度導出部14により導出された角度に基づいて、ミラー2の角度を調整する。
(もっと読む)
ナビゲーション装置及び地図データ更新方法
【課題】 ユーザの負担を軽減し、更新作業中でもできるだけディスク再生装置を普段通りに使用できるようにする「ナビゲーション装置及び地図データ更新方法」を提供する。
【解決手段】 整合性を確保しながら更新地図データを記録する第1の領域及び更新地図データを一時的に記録する第2の領域を有する地図データ記録装置13と、更新地図データを記録した更新ディスク11を再生するディスク再生装置12と、ディスク再生装置12から更新地図データを読み出して第2の領域に記録し、第2の領域に記録された更新地図データを所定のタイミングで第1の領域に記録する地図データ制御部14とを備えるので、ディスク再生装置12から更新地図データを読み出して第2の領域へ書き込む時間が短くて済み、ディスク再生装置12が更新ディスク11の再生により専有される時間を短くすることができる。
(もっと読む)
車両状態量検出装置
【課題】車両重心点の旋回中心に対する公転運動と、車両重心点回りの自転運動とを区別して検出する。
【解決手段】例えば車両重心点を挟んだ前後に前方GPSアンテナ1と後方GPSアンテナ2とを配設し、夫々のアンテナの位置情報を、例えばリアルタイムキネマティックGPSなどによって正確に且つ短周期に取得し、夫々のアンテナ位置の時間微分値から当該アンテナ位置の移動速度Vf、Vrを求め、夫々のベクトル成分から車両重心点の移動ベクトル、つまり走行速度V及び車体スリップ角βや、車両重心点回りの回転運動、つまりヨー角速度γなどを算出する。また、車両重心点の移動軌跡から旋回半径Rや、それらのパラメータの関係から路面摩擦係数μが得られるので、ヨー角速度乖離量Δγを求め、それが閾値を超えるときに運転者に警報を与えるようにしてもよい。
(もっと読む)
ナビゲーションシステム
【課題】道路の状況に応じた適切な車速及びステアリングの操舵(だ)角を判断するための情報を運転者に対して適切に提供するようにして、多様な事項についての判断処理を行う必要がある場所を走行する場合であっても、運転者の負担を低減することができ、車両の安全な走行に寄与することができるようにする。
【解決手段】地図データを格納する記憶手段と、情報を表示する表示部と、車速を検出する車速センサ13と、前記地図データと車速とに基づいて、進行方向前方の道路区間の表示形状を決定し、該道路区間の表示形状を前記表示部に表示させる制御部とを有する。
(もっと読む)
車両用警報装置
【課題】 運転者が異常や危険の発生を確実に認識することができると共に、複数種類の異常や危険を確実に識別することができる車両用警報装置を提供する。
【解決手段】 事象検出装置1は外部センサーおよび内部センサーからの信号を受け、発生している事象(異常や危険)を検出する。振動体制御装置2は、事象検出装置1から受けた情報に基づいて振動体駆動装置(4a〜4dのいずれか)へ駆動信号を出力する。これにより、車両のシートに埋め込まれた振動体(5a〜5dのいずれか)が振動する。音源制御装置3は、事象検出装置1から受けた情報に基づいて警報音および音量を決定し、振動体制御装置2から出力される同期信号に同期させて音源装置7へ出力する。音源装置7は音源制御装置3からのデータに対応する警報音信号を生成し、音源制御装置3から出力されたデータによって音量制御をしてスピーカ9へ出力する。
(もっと読む)
方向指示装置
【課題】 個人誘導に用いられる従来の方向指示装置では、設置場所が限られる場合があり、また、利用者や来訪者に目的地に向かって進むべき方向を直接知覚させるようになっていない。
【解決手段】 本発明では、方向指示装置1を情報入力部5と指差し部7とを備え、この情報入力部に、目的地に関する所定の情報が入力されると、駆動手段を制御してこの入力情報に対応した方向に指差し部を向けて方向指示するように構成している。
(もっと読む)
ナビゲーション装置
【課題】迂回経路を利用するか否かをユーザの判断に委ねることができるナビゲーション装置を提供すること。
【解決手段】ノード接続点データ22などが参照され、推奨経路を構成する第1の区間に含まれるノード接続点の数が計数される。第1の区間に含まれる交差点の数がしきい値K以上であるとの判定がなされると、案内画像データ24が読み出され、迂回経路の存在を示す矢印の画像がディスプレイ10に表示される。また、案内音声データ25が読み出され、「迂回も可能です。」との音声がスピーカ9から出力される。
(もっと読む)
車両用表示装置
【課題】 運転者が車両の前方側の走路形状を容易に把握できる車両用表示装置を提供する。
【解決手段】 記憶媒体13に格納された三次元の座標情報からなるデジタルマップデータに基づいて走路形状を表示する表示器2と、車両Aの現在位置を検出する位置検出手段17と、位置検出手段17により検出された車両Aの現在位置に基づいて前記デジタルマップデータを読み出して車両Aの前方側の走路形状を表示器2に表示させる制御手段15と、を備える車両用ヘッドアップディスプレイ装置であって、制御手段15は、表示器2に表示させる前記走路形状において、所定の曲率以上のカーブ部分L4を強調して表示させる。
(もっと読む)
カーナビゲーション装置
【課題】 雑誌等の対象物に記載された文字情報を、目的地の指定やメモリ地点の登録のための地点情報として簡易に入力することを可能とする。
【解決手段】 カーナビゲーション装置1においては、ユーザによる目的地の指定(あるいはメモリ地点の登録)の方法の一つとして、ユーザが入力した画像からの文字認識に基づいて、指定したい施設や店舗の名称、住所、電話番号といった地点情報を入力する方法がある。この場合、ユーザは、地点情報が掲載された雑誌等の書面の画像を、車載カメラ2により撮影して入力する。制御回路5は、車載カメラ2から画像データを取込んで、表示部7の画面に表示させ、ユーザのタッチパネルの操作による範囲指定を受付け、その範囲に含まれる画像データを画像認識部10によって処理させてその範囲内に含まれる文字情報を認識させる。
(もっと読む)
車両用制御装置
【課題】緊急情報を外部から取得した場合に、その緊急情報を即座に車両の乗員に提供する。
【解決手段】車載用情報機器100は、緊急情報を取得したときに、ユーザによって選択された音楽、映像等の情報を音声出力部50や表示装置60において提供中である場合には、その提供中の情報に割込ませて取得した緊急情報を提供する。また、音声出力部50や表示装置60がオフされている場合には、緊急情報の取得をトリガとして、音声出力部50や表示装置60を起動して、緊急情報を提供する。従って、緊急情報が取得された場合には、その緊急情報を迅速かつ確実に車両の乗員に提供することが可能になる。
(もっと読む)
ナビゲーションシステム、経路探索装置およびナビゲーション装置ならびにプログラムおよびアイコン
【課題】 案内ポイントとなるノードの属性(エレベータなど)とその付帯情報(上り、下りなど)を、利用者に分かり易く表示するナビゲーションシステムを提供する。
【解決手段】 ノードデータには該ノードに連結するリンクを構成する移動手段を示すノード属性情報を付加し、アイコンDB28には、前記ノード属性情報に対応したアイコンのデータを蓄積し、経路探索部24が探索した案内経路を複数の区分に分け、案内ポイントデータ作成部27は、複数の区分に分けられた案内経路の終点となるノードを案内ポイントとし、案内ポイントのノード属性情報に応じたアイコンを指定するデータを含む案内データを作成してナビゲーション装置30に配信する。ナビゲーション装置30は、配信された案内データに基づいて操作・表示部37に地図および案内経路をするとともに、案内データに基づいて、案内ポイントに応じたアイコンを表示する。
(もっと読む)
酒気帯びドライバー支援提供自動システム
ユーザーから提供されたサンプルに基づいてユーザーの酒気帯びの数値を生成する薬物検出器と、送迎サービスと通信する通知手段とを備え、通知手段は酒気帯びの数値が所定の範囲外のときに送迎サービスに連絡するドライバー支援提供システムである。通知手段はまた、送迎サービスがユーザーの所在を確認できるように、送迎サービスに連絡をするときに送迎サービスにナビゲーションデータを提供する。さらに、ユーザーから提供されたサンプルに基づいてユーザーの酒気帯びの数値を生成するステップと、酒気帯びの数値が所定の範囲外のときに送迎サービスに連絡するステップと、送迎サービスが前記ユーザーの所在を確認できるように連絡するステップの間に送迎サービスにナビゲーションデータを提供するステップを備えている酒気帯びドライバー支援提供方法である。 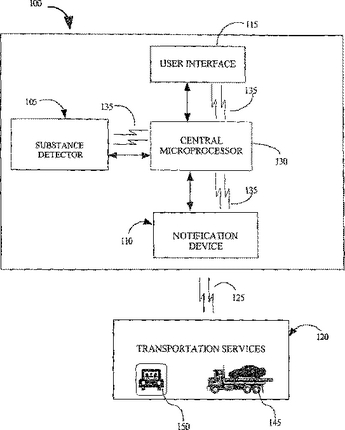 (もっと読む)
(もっと読む)
接近警報制御方法及び接近警報装置
【目的】 前方車両への接近注意の度合が大きいほど後方車両における接近注意の警告タイミングを早め、あるいは警告頻度を多くする「接近警報制御方法及び接近警報装置」を提供することである。
【構成】 前方車両1に対する接近注意を後方車両2において行なう接近警報制御において、前方車両1において、ユーザ設定情報あるいは車両情報に基づいて接近注意の度合を決定し、車車間通信により決定した接近注意の度合を後方車両2に送信し、後方車両において、前方車両から受信した度合に応じた条件で接近注意の警報を行なう。
(もっと読む)
車両用情報表示装置
【課題】
目的地および経由地の設定後において、車両が経由地で駐車した時、(つまり、経由地での降車タイミング)に当該経由地での休憩時間などの使用可能時間または経由地を出発すべき推奨出発時間を報知することができ、乗員の利便性向上を図ることができる車両用情報表示装置の提供を目的とする。
【解決手段】
種々の情報を表示する表示部を備えた車両用情報表示装置であって、目的地および経由地の設定後において目的地への予想到着時間を推定する予想到着時間推定手段S3と、経由地に駐車したか否かを判定する経由地駐車判定手段R1と、経由地駐車判定手段R1の判定結果に基づいて経由地駐車時にエージェント機能により経由地での使用可能時間または経由地を出発する推奨出発時間を推定する推定手段S8と、推定手段S8による推定結果を報知する報知手段S9とを備えたことを特徴とする。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】 センサの部品コストを高くせずに一定範囲内の障害物を検出できるようにすることである。
【解決手段】 センサユニット11は、検出方向の異なる5個のセンサ11a〜11eが水平方向並んで配置され、かつ隣接するセンサと検出エリアの一部が重なるように設定されている。2つのセンサで同一の計測距離が計測された場合には、重なりエリアの中間軸上の計測距離に対応する点を物体の座標として求める。また、2つのセンサで同一の計測距離が存在しない場合には、各センサ11a〜11eの主軸上の計測距離に対応する点を物体の座標として求める。
(もっと読む)
車速度測定システム
【課題】 特別な機器を設置しなくても車速度を測定することが可能なシステムを提供する。
【解決手段】 このシステムは、路上に設置された複数のアクセスポイント11と、路上を走行する車両12に搭載された無線端末13とを備えている。車両12がアクセスポイント11の設置点付近を通過する場合、受信信号強度(RSSI)は、車両12がアクセスポイント11に近づくにつれて徐々に増加し、アクセスポイント11に最も近づいた時点でピークに達し、アクセスポイント11から離れるにつれて徐々に減少する。そして、車両12の速度v[m/s]が速ければグラフのカーブは急峻となり、速度v[m/s]が遅ければグラフのカーブは緩やかになる。したがって、このようなRSSIの変化の度合いから車速度を算出することができ、さらには、RSSIのパターンの違いから、車両の上り・下りを判断することもできる。
(もっと読む)
4,681 - 4,700 / 4,855
[ Back to top ]