
Fターム[5H180CC12]の内容
Fターム[5H180CC12]に分類される特許
4,741 - 4,760 / 4,855
踏切事故防止システム
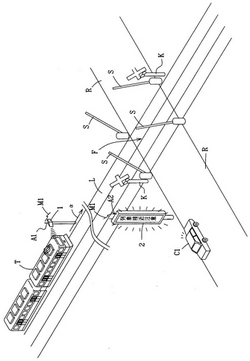
【課題】踏切の通過者に対して踏切内での危険を確実に注意喚起し、踏切事故を未然に防止することができる踏切事故防止システムを提供する。
【解決手段】列車接近警告手段1により踏切Fの通過者C1に対して危険を喚起することができるが、列車検知手段1が列車Tの移動方向αを検知可能なレーダーとなされていることで、踏切Fと逆の方向に進行する列車の検知や、降雨等の影響を排除し、踏切Fの通過者C1に対して踏切F内での危険をより確実に注意喚起して踏切事故を未然に防止することができる。
(もっと読む)
車両の路面標識検出装置

【課題】 路面標識の認識精度を向上させる。
【解決手段】 検知ライン設定部24は外界撮像カメラ11から入力される画像データ上において、道路形状認識部23にて検知された自車両の走行路R内に、この走行路Rに沿って伸びる複数の検知ラインD1,…,Dk,…,Dn(設定数nは任意の自然数であって、自然数kは1≦k≦n)を走行路Rの幅方向に所定間隔をおいて設定する。明るさ検知部25は各検知ラインD1,…,Dk,…,Dn毎に長さ方向における明るさ(例えば、輝度や明度等)の変化を検知する。路面標識認識部26は、明るさ検知部25にて検知された各検知ラインD1,…,Dk,…,Dn毎の長さ方向における明るさの変化位置に基づき、所定の路面標識(例えば、停止線等)の有無および路面標識までの距離を検知する。
(もっと読む)
車両用ナビゲーション装置
【課題】 曲がるべき交差点を新規な手法でわかりやすくに伝えることができるような車両用ナビゲーション装置を提供する。
【解決手段】 車両用ナビゲーション装置は、案内交差点Xについて、「案内交差点Xとその手前交差点Yとの距離が所定距離より短い」という条件と「案内交差点Xへの進入可能車線、および手前交差点Yにおける進入可能車線が、案内経路によって制限される」という条件が共に満たされる場合、自車両がその手前交差点に近づいたとき、画像表示と音声表示を併せて行う。その画像表示は、案内交差点X、手前交差点Y、案内経路に沿った案内交差点Xおよび手前交差点Yへの進入道路、案内交差点Xおよび手前交差点Yへの進入可能車線の指定線22、およびこの2つの交差点の強調表示31、32を同時に画像表示する。また、その音声表示は、その案内交差点への進入可能車線の指定、およびその手前交差点への進入可能車線の指定を案内する。
(もっと読む)
車両用表示装置
【課題】 限られた表示領域内において、画像を表示する第2の表示部の表示範囲ができるだけ大きな車両用表示装置を提供すること。
【解決手段】 複数の表示部160を一体に備える車両用表示装置100において、複数の表示部160として、基本形状の一部を切り欠いた形状を表示範囲とする少なくとも2つの第1の表示部161,162と、画像を表示し、第1の表示部161,162間に設けられるとともに、表示範囲として第1の表示部161,162の切り欠かれた部位を含む第2の表示部163を少なくとも備えるように構成した。第2の表示部163の表示範囲を、本来であれば第1の表示部161,162の表示範囲である部位に渡って設けることで、第1の表示部161,162に表示される表示を小さくすることなく、表示部160の限られた大きさの表示領域内においてできるだけ大きくした。
(もっと読む)
車両の走行支援装置
【課題】 自車両周辺の外界の状況を精度良く検知し、自車両の走行支援を適切に行う。
【解決手段】 受信電力検知部25は情報送受信部12にて受信した対象物情報の受信電力を発信元である各他車両毎に算出する。受信電力算出部29は自車両と他車両との相対距離に応じて、自車両と他車両との車車間通信で検知される受信電力を算出する。見通し判定部30は受信電力検知部25にて検知された各他車両毎の受信電力と、受信電力算出部29にて算出された受信電力とを比較し、自車両と他車両との間の相対的な見通し状態を推定する。走行支援判定部31は自車両と他車両との相対的な見通し状態と、道路形状認識部26にて検知された自車両の進行方向の道路形状と、相対速度判定部28にて算出された自車両と他車両との相対速度とに基づき、走行支援レベルを設定し、走行支援レベルに応じて制動装置16および警報装置17を作動させる。
(もっと読む)
ナビゲーション装置と関心地点情報提示方法
【課題】 関心地点情報を乗員の負担を軽減して検索、提示するナビゲーション装置とその関心地点情報提示方法を提供する。
【解決手段】 ナビゲーション装置50は、地図情報記憶部3、ディスプレイ4a、走行軌跡記憶部6、現在位置検出部11、走行軌跡にもとづき車両の迷走状態を判定検出する迷走状態判定部15、迷走範囲特定部16、近傍地理検索部17から構成されている。迷走状態判定部が迷走状態と判定したとき、迷走範囲特定部は走行軌跡から迷走区間を特定し、迷走区間を覆う2次元の迷走範囲を特定する。近傍地理検索部は、特定された迷走範囲内に存在するPOI情報を地図情報記憶部から検索してディスプレイに提示させる。
(もっと読む)
障害物検出装置、車両
【課題】 自車両に対する障害物の位置関係を特定して運転者等に警報を提示する。
【解決手段】 障害物検出装置は、自車両1の周囲の障害物を検出するために、それぞれが異なる箇所に設置され、携帯端末2から発信された無線電波を受信アンテナ1a,1b,1cで受信し、無線電波間の位相差を電波位相比較回路12で算出し、当該位相比較結果から自車両1に対する携帯端末2の位置関係を計算機13で特定すると、特定された自車両1に対する携帯端末2の位置関係に基づいて、自車両1にとって障害物となる携帯端末2を検出して、警報表示部14で報知する。
(もっと読む)
車載情報端末
【課題】最新の道路交通情報を必要な状況において入手することができる車載情報端末を提供する。
【解決手段】VICS情報が必要であるか不要であるかを判定し(ステップS3〜S7)、必要であると判定された場合は、VICS情報配信サーバに対してVICS要求を発信する(ステップS8)。そして、発信したVICS要求に応じてVICS情報配信サーバから配信される広域VICS情報を受信する(ステップS9)。
(もっと読む)
車両用経路計算装置
【課題】ユーザの走行経験をより効果的に経路計算に反映し、ユーザにとって違和感の少ない経路を探索することが可能な車両用経路計算装置を提供する。
【解決手段】車両が道路を走行した際に、各道路(各リンク)ごとに走行状況を示す走行状況データを外部メモリ9に記憶する。走行状況データが記憶された各リンクの走り易さを評価し、その評価結果に応じて、ユーザが走り易いと感じた評価される道路(リンク)のコストを下げ、逆に走りにくいと感じた道路(リンク)のコストを上げる。このようにして、走行状況データにより評価される走り易さを考慮して、リンクに対して付与するコストを決定する。このように決定されたリンクコスト及びノードコストが最小となる経路を探索することにより、ユーザが妥当と考える経路を探索することができる。
(もっと読む)
車両前照灯の配光パターン確認システム
【課題】前照灯制御装置の制御結果としての配光パターン、照射領域、制御の善し悪しの確認等をユーザが容易に行なえるようにする。
【解決手段】前照灯制御装置(3)は制御演算部(20)と操作部(21)とを備え、制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して操作部に与える。同時にその時の入力信号と操作信号をカーナビゲーション装置(2)に送信する。操作部は操作信号に従って前照灯を操作する。カーナビゲーション装置の制御回路は前照灯制御装置から送られた入力信号と操作信号に基づいて前照灯の配光パターンを算出し、算出した配光パターンと自車位置と車体方位とを周辺地図に重ねて表示させる。
(もっと読む)
車両の接触回避制御装置
【課題】 自車両と他車両との接触を回避するべく自車両の走行を支援する際に、適切な走行支援を実行する。
【解決手段】 危険性判定部24は、接触回避制御動作の作動状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して他車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合や、障害物が存在する場合等に、対象物位置・走行軌跡算出部23にて自車両から他車両までの距離の検知が不可になると、対象物走行軌跡算出部21から入力される他車両の走行軌跡と、自車両の走行軌跡とに基づき、他車両の危険度を判定する。
(もっと読む)
車両用ナビゲーション装置
【課題】 車載用車両用ナビゲーション装置が無線送信の放送局の受信可能エリア外に出る恐れを低減する。
【解決手段】 車載用車両用ナビゲーション装置が、放送局データに基づいて、その放送局の受信可能エリアを地図に重ねて表示し、さらにその表示と同時にその放送局の名称および放送局の無線送信基地局への地図上の方向、およびその無線送信基地局の現在位置からの距離を表示する。また、現在地から設定された目的地までの経路の選択を、当該経路が当該受信可能エリア内にあることを考慮した方法と、考慮しない方法の2つで行い、その2つの方法によって選択された2つの経路を、案内経路候補として、ユーザに選択を促すような形式で画像表示装置に表示させる。
(もっと読む)
車間距離制御装置
【課題】 本発明は、車間距離制御装置に関し、先行車両との関係で自車両が自動停車されることにより停止されたレーダによる照射を適当なタイミングで再開させることにより、車間距離制御を的確に実行させることを目的とする。
【解決手段】 車両前方にレーザ光を照射するレーダセンサを用いて先行車両との車間距離を制御するうえで、先行車両の停車に伴って自車両を停車させる車両停車制御を実行させる。車両停車制御により自車両の停車が開始された際には、レーダセンサによるレーザ光の照射を停止させる。そして、レーダセンサによるレーザ光の照射が停止された後、運転者により照射再開スイッチのオン操作が行われた際には、そのレーザ光の照射を再開させる。
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
ナビゲーション装置、および目的地候補リスト表示方法
【課題】 ナビゲーション装置において、最適な目的地候補をリスト表示すること。
【解決手段】 使用者によって目的地が設定された場合には、目的地として設定された地点、自車両の現在位置、および現在の日時を組とした目的地設定履歴を登録する。登録された目的地設定履歴から、過去に設定操作を行った地点が自車両の現在位置から所定の範囲内に存在する目的地を抽出し(ステップS130)、抽出した目的地をその設定操作を行った日時の降順にリスト表示する(ステップS150)。
(もっと読む)
監視システム
【課題】 監視領域や踏切において人や車両を確実かつ正確に検知し、監視者や運転手に的確に報知する監視システムを提供する。
【解決手段】 監視領域を挟んで一方の側に検出媒体の送信を行う送信手段及び該検出媒体の受信を行う受信手段を配置し、他方の側に検出媒体を反射する反射手段を配置して送信手段から反射手段に向けて検出媒体を常時送信し、受信手段で受信するとともに、受信信号毎にその反射位置を算出し、かつ、反射手段で反射された検出媒体に基づく基準受信信号については、その受信強度のまま、もしくは増幅して出力し、反射手段以外で反射された検出媒体に基づく受信信号については、その受信強度のまま、もしくは減衰させて出力し、基準受信信号が途絶えるか、減衰したときに、監視領域に被検出物体が存在することを検知する。
(もっと読む)
配送支援システム、その方法、センタ装置、端末およびプログラム
【課題】 車両の状況を的確に把握して無駄なく安全、かつ迅速に荷物を配送することができる配送支援システム、その方法、センタ装置、端末およびプログラムを提供する。
【解決手段】 ユーザ端末10は、センタ装置20にネットワーク100を介して配送依頼に関する情報を登録し、センタ装置20は、車両端末30が備えられている車両の位置をGPS電波110および/またはネットワーク100を介して送信される位置情報から特定して、車両の作業状況情報を管理し、車両端末30は、目的地までの走行ルート、到着時間、配送依頼に関する情報を取得する。
(もっと読む)
通信ナビゲーションシステム、情報配信サーバおよび携帯端末ならびにプログラム
【課題】 地下街や建物内部であっても、階をまたいだ経路探索の結果をユーザにわかり易く提供することができる通信ナビゲーションシステムを提供する。
【解決手段】 情報配信サーバ20は、ノードデータとリンクデータとコストデータからなる地図データを蓄積した地図データベース23を備え、リンクデータには各リンクに該リンクが位置する階の情報を属性情報として付加し、階をつなぐリンクには前記階の情報とは異なる属性情報を付加する。経路探索部24は、地図データベースを参照して出発地から目的地に至るリンクをたどり最適なリンクを案内経路として決定し、案内ポイントデータ作成部26は、案内経路に応じて案内ポイントを含む案内データを作成する。携帯端末20は、位置情報受信部35で構造物内に設置された位置情報送信ユニットから、階の情報を含む位置情報を受信し、位置情報に基づいて案内データ中の案内ポイントに設定された案内を行う。
(もっと読む)
地図表示装置
【課題】 地図データを構成する各オブジェクトの描画順序や、地図の区画の描画順序に関わらず、所望の状態の地図を表示することが可能な地図表示装置を提供する。
【解決手段】 地図データ記憶媒体51から地図データを取り出してデータ格納バッファ53に格納し、データ格納バッファ53に格納された背景データや道路データ等を構成するオブジェクトを1つずつ取りだして、画像形成領域55に書き込むことによって画像を形成する。なお、画像形成領域55の各画素は、表示色情報と描画優先度とから構成されており、オブジェクトの描画優先度の方が画像形成領域55の該当画素の描画優先度よりも高い場合のみ、画像形成領域55の画素は更新される。すべてのオブジェクトが処理されて画像形成が完了すると、画像形成領域55の表示色情報をVRAM57に転送し、表示部に地図を表示させる。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
4,741 - 4,760 / 4,855
[ Back to top ]