
Fターム[5H180CC12]の内容
Fターム[5H180CC12]に分類される特許
4,801 - 4,820 / 4,855
ナビゲーションシステム
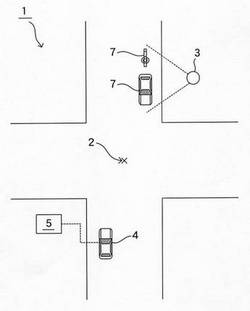
【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
(もっと読む)
地図データ提供装置

【課題】 ユーザの生活圏に合った適切な地図データを提供する地図データの提供方法を提供すること。
【解決手段】
地図データ収録範囲の日本全国を、複数の分割パターンでそれぞれ複数の地方に分割する。複数の分割パターンで分割した地方は、お互いに重複しない。複数の分割パターンで分割したそれぞれの地方に対応した地図データを生成し、それぞれ記録媒体2に格納してユーザに提供する。ユーザは、任意の記録媒体2を購入することができ、ユーザの生活圏にあった分割パターンで分割された地方の地図データを選択することができる。
(もっと読む)
車載用ナビゲーション装置
【課題】車両が誘導経路から逸脱したときに、単に誘導経路に戻る経路を提供するのではなく、ユーザの意図に応じた経路を提供する「車載用ナビゲーション装置」を提供する。
【解決手段】制御部17は、車両が誘導経路に沿って走行するように適宜案内情報を提供するとともに、車両が誘導経路から逸脱したことを検知すると、探索条件を変えて複数の探索経路を探索し、それらの探索経路のデータを誘導経路記憶部22に記憶する。誘導経路描画部23は、誘導経路記憶部22に記憶された探索経路のデータに基づいて複数の探索経路を表示装置7に表示された地図画像上に重ね合わせて表示する。
(もっと読む)
天災予防装置
【課題】車両に対する天災を確実に予防すること。
【解決手段】天災予防装置10は、気象データおよび車両に対する天災を発生させる要因となる傾向データに基づいて所望の駐車場所の天災危険度を推定する天災危険度推定部14dと、天災危険度推定部14dによって推定された所望の駐車場所の天災危険度が許容範囲内であるか否かを判定する天災危険性判定部14eと、天災危険性判定部14eによって所望の駐車場所の天災危険度が許容範囲外であると判定された場合に、当該車両が天災を受けるおそれがある旨を通知する天災危険性通知部14gとを備える。
(もっと読む)
交通情報取得装置及び交通情報取得システム
【課題】大掛かりなインフラ整備することなく、自車周辺の交通情報を容易に取得できる交通情報取得装置を提供すること。
【解決手段】他の移動体からの情報を受信する無線送受信部3と、既知の情報を記憶する情報記憶部4と、受信された他の移動体の情報を情報記憶部4に記憶された既知の情報と比較し未知の情報を取り出す情報取り出し部9と、取り出した未知の情報を自己の情報及び既知の情報と合成する情報合成部10と、合成した情報を地図データベース2に格納された地図情報と共に表示する表示部6と、合成した情報を他の移動体に送信する無線送受信部3とを備え、他の移動体の情報を受信可能な範囲にいる限り、他の移動体を介して連鎖的に直接受信できない範囲にいる移動体の情報も取得することができ、大きなインフラなしで、広い範囲の移動体の存在、移動状況などを正確に取得し表示することができる。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 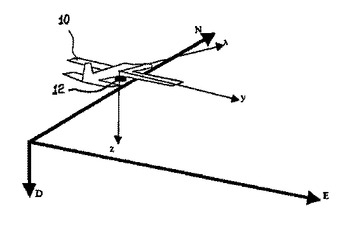 (もっと読む)
(もっと読む)
通信ネットワークにおいて移動体ユーザの位置に基づきメッセージを送信するための方法
無線通信ベースネットワーク(10)において位置ベースメッセージを送受信するためのシステム及び手続に関する。本システムにより、メッセージは指定されているユーザに対し送信され、メッセージの関連する特定の位置(X1)に関連付けられることが可能となる。メッセージは第1の車両(26a)のユーザが特定の位置(X1)を通過するときに残されるか、或いは、ユーザはその位置(X1)に存在しない場合にもメッセージの位置(X1)を指定することが可能である。次に、受信者がその位置(X1)の付近にいるとき、メッセージはいずれの受信者車両のユーザインタフェースにて表示されることも可能であり、或いは、将来閲覧されることも可能である。本方法では、そうした位置ベースメッセージは別のユーザ又は送信している同じユーザに対し残されることが可能である。送受信されるメッセージは文字、オーディオ、ビデオ又は画像的なメッセージであることが可能であり、コンピュータ化されているマップ上に重ね合わされて、メッセージと位置との間の関連をさらに意味深いものとしてもよい。とにかく、開示のシステム及び方法により、メッセージを対象の特定の位置と関連付けることが可能となる。 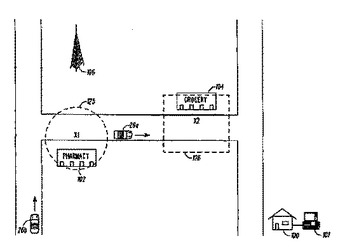 (もっと読む)
(もっと読む)
2周波数の一方で測定データが利用できない場合に短期間バックアップ2周波数ナビゲーションを行なう方法
本発明は、2周波数ナビゲーションが依存する2周波数の一方が利用できない場合に、短期間バックアップ2周波数ナビゲーションを実行する方法を含んでいる。本方法は、維持されている周波数上の搬送波位相測定値および電離層屈折効果のモデルを用いて、利用できない周波数上の符号および搬送波位相測定値を合成して、両方の周波数上の測定値が利用できる場合に更新するステップを含んでいる。 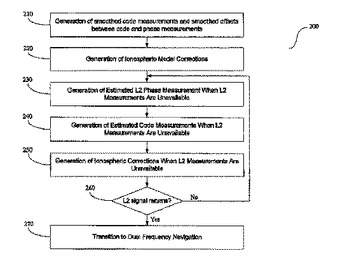 (もっと読む)
(もっと読む)
ナビゲーション装置および経路誘導方法
ナビゲーションサーバ1,地図DB102と、出発地および目的地間の誘導経路を探索する経路探索部104と、誘導経路の道路形状が簡略化された形状簡略道路地図データを作成する形状簡略道路地図作成部106と、地図データにおける誘導経路の形状と形状簡略道路地図データにおける誘導経路の形状との差分が所定量以上ある誘導経路の部分を注意部分として検出する注意部分検出部107と、経路誘導において現在地が注意部分に到達した際にナビゲーション端末2に出力させる、地図データおよび形状簡略道路地図データの注意部分の差分に基づいた誘導注意情報を生成する注意情報生成部108と、簡略道路地図データおよび誘導注意情報を含む配信情報をナビゲーション端末2へ送信する通信部110と、を有する。これにより、誘導経路の視認性を向上させ、かつ誘導方向の誤認識を低減する。 (もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 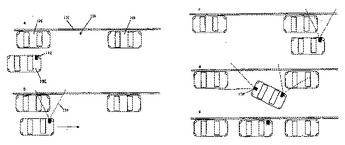 (もっと読む)
(もっと読む)
車両用情報システム
本発明は、データを格納するための記憶媒体(20)と、記憶媒体を駆動する駆動機構(30)と、第1の速度が第2の速度より高い、少なくとも2つの異なる速度を用いて記憶媒体(20)の駆動機構(30)を制御する制御装置(40)とを備えた車両用情報システム(10)に関する。本発明によれば、制御装置(40)は、センサデータを用いて車両の停止状態を判断するために、及び車両が停止状態にある場合には第1の速度で駆動装置(30)を制御するために、駆動機構を駆動することにより記憶媒体(20)にデータを記録する。 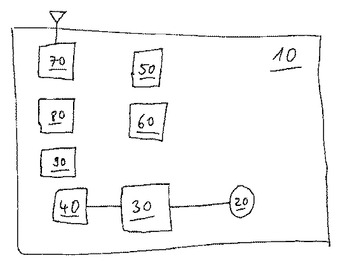 (もっと読む)
(もっと読む)
状況検出表示システム、状況検出表示方法、状況検出表示システム制御プログラム、および当該プログラムを記録した記録媒体
状況検出表示システム(100)では、全方位カメラ(1)、車内センサ類(3)、車外センサ類(4)などによって自車およびその周囲の状況を検出し、検出した結果を示す画像データであって、自車の画像を含む画像データを画像用DB(6)から選択して、液晶パネル(7)における速度計の表示に近接する位置に表示する。 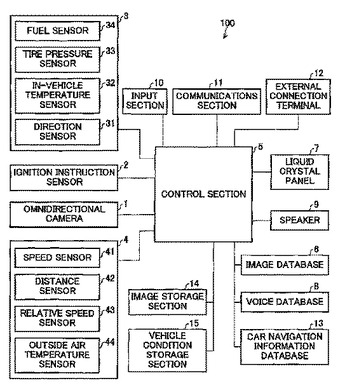 (もっと読む)
(もっと読む)
携帯電話を通して目標位置の方向を取得するための方法
本発明は、携帯電話を通して目標位置の方向を取得するための方法を開示するものであって、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報を取得する過程と、携帯電話の画面に表示されるこの地理的子午線の角度及び現在位置の地理的子午線を決定する過程と、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報に従って現在位置から目標位置への方向を決定する過程と、この方向と地理的子午線との間の仰角を決定する過程とを含む。その画面上に表示される地理的子午線の角度とその仰角とに従って、携帯電話は、現在位置から目標位置への携帯電話の画面上に表示される方向を決定し、表示方向に従って画面上の目標位置の方向を表示する。本発明は、ユーザに目標位置の方向を提供できない既存の携帯電話の問題を解決する。ユーザは、携帯電話を通して目標位置の方向を確認することができる。 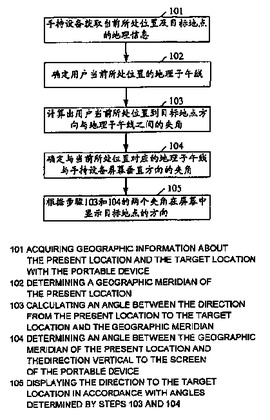 (もっと読む)
(もっと読む)
文字認識装置、移動通信システム、移動端末装置、固定局装置、文字認識方法および文字認識プログラム
移動可能なカメラで撮影した情景画像中に含まれうる単語を、単語辞書もしくは地図データベースを用いて効率的に抽出できるようにする。
位置情報取得手段101は、装置の現在位置を測位して位置情報を取得する。方位情報取得手段102は、装置の向きを検出して方位情報を取得する。文字列認識手段104は、現在位置情報と方位情報とにもとづいて、情景画像の撮影範囲を特定する。文字列認識手段104は、撮影範囲の位置に対応づけられている店舗名、建築物名および地名などの情報を、地図データベース103から抽出する。そして、文字列認識手段104は、抽出した店舗名、建築物名および地名などの単語知識を用いて文字認識を行う。
(もっと読む)
車線装置、選択装置、及び車両の車線判定方法
本発明は、車線装置(30)、車両(10)の車線を判定する方法、及び車線装置(30)と相互作用する選択装置に関する。車線装置(30)は、少なくとも1つの距離センサ(58、59、65)の距離データ(60、61、66)を評価するための評価手段(32、35、37)を含み、該距離センサによって、距離データ(60、61、66)から、少なくとも部分的に、車線の横に基本的に連続して延びる参照物体(62、64)からの側方距離(d1−d4)を決定することが可能である。評価手段(32、35、37)は、距離データ(60、61、66)を基に車線データ(36)を決定するよう構成されている。本発明によると、さらに評価手段(32、35、37)は、特に車線付近に存在する車両(17)又は参照物体(62、64)の不連続性(63)によってもたらされる、誤った情報を、距離データ(60、61、66)から、除去するように構成されている。  (もっと読む)
(もっと読む)
自動車安全装置用の物体認識装置および方法
本発明は、少なくとも1つの電磁波(12)を発生するために構成されている信号源(11)および障害物(16)から反射される少なくとも1つの電磁波(18)用の受信機(14)を備えた自動車搭乗者保護システム用物体認識装置に関する。本発明によれば、評価装置(20)が設けられて、障害物(16)から反射されかつ受信機(14)によって受信される少なくとも1つの電磁波(18)の偏波を評価し、かつ少なくとも1つの評価信号(22)を発生するように構成されている。それにより、例えば表面構造のように障害物に関する付加的な情報を得て、自動車搭乗者保護システムのために使用することが可能である。 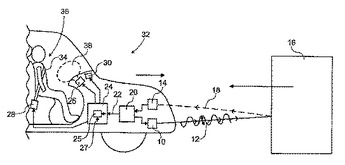 (もっと読む)
(もっと読む)
自動二輪車用の走行情報表示方法および走行情報表示システム
【課題】 バンク角等の走行条件を容易に把握することができる自動二輪車用の走行情報表示方法を提供する。
【解決手段】 自動二輪車のバンク角を取得する工程(S10)と、バンク角(152,154)を自動二輪車の走行コース150に沿って表示する工程(S20)とを包含する自動二輪車用の走行情報表示方法であり、工程(S20)において、バンク角(152,154)の度合いは、走行コース150から外れる度合いによって表示されることを特徴とする。
(もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 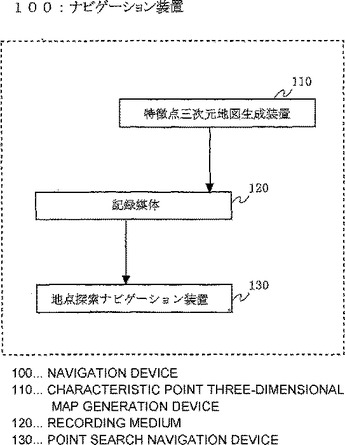 (もっと読む)
(もっと読む)
自動二輪車用の走行支援方法および走行支援システム
【課題】 技量のあるライダーでもそうでないライダーであっても、適切な走行支援を実行できる自動二輪車用の走行支援方法を提供する。
【解決手段】 自動二輪車の走行情報を利用して走行を支援する方法であって、自動二輪車が所定のカーブを走行する際に(S10)、カーブの走行条件をライダーに通知する工程(S20)を包含し、前記カーブの走行条件として、予め記録しておいた走行情報に基づき算出され、ライダーの技量レベルに対応して変更可能な走行適正値と、実際の走行状態の値との対比結果が前記ライダーに通知される、自動二輪車用の走行支援方法である。
(もっと読む)
4,801 - 4,820 / 4,855
[ Back to top ]