
Fターム[5H301AA02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 陸上 (1,642) | 屋内 (514)
Fターム[5H301AA02]に分類される特許
81 - 100 / 514
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
方向装置およびそれを用いた動作システム

【課題】掃除ロボットを制御する方向装置、およびそれを用いた動作システムを提供する。
【解決手段】掃除ロボットの走行ルートを制御する方向装置であって、前記掃除ロボットによって発せられ、エンコードされた無線信号を受ける受信ユニット、少なくとも1つの無線信号を発する送信ユニット、および前記受信ユニットが前記エンコードされた無線信号を受けた時、前記掃除ロボットの走行ルートを制御する第1の方向無線信号を発するように前記送信ユニットを有効にする制御ユニットを含むことを特徴とする方向装置を採用した。
(もっと読む)
無人搬送車
【課題】床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有する無人搬送車を提供する。
【解決手段】本無人搬送車1は、その搬送車本体1aの前方に突設され、駆動輪5に対して左右方向のいずれか一方にオフセットさせて配置される方向転換用ローラ7と、搬送車本体1aの側方に前端及び後端の2箇所突設され、壁20との接触により無人搬送車1を壁20に沿って自走させる各壁並進用ローラ10、11とを備えているので、床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有するようになる。
(もっと読む)
駐車支援装置
【課題】出庫困難となるような駐車支援を禁止し、適切な駐車支援が行える駐車支援装置を提供する。
【解決手段】本発明に係る駐車支援装置1においては、各種センサの時系列の計測値に基づき、車両状態判断部21が駐車支援後に自車両が自走困難な状態になる可能性があるか否かについて判定を行なう。車両状態判断部21が、駐車支援後に自走困難状態になる可能性があると判定した場合には駐車支援を禁止する。また、車両の異常状態の影響度を定量化し、影響度が自動駐車に重大な影響を与えない範囲の偏向に収まる場合は駐車支援を許可し、影響が大きい場合には駐車支援を許可しないこととする。
(もっと読む)
ロボット掃除機、並びにロボット掃除機を用いた遠隔監視システム及びロボット掃除機を用いた遠隔監視方法
【課題】掃除又は走行時に作成した掃除地図を提供し、特定の位置又は領域の監視画像を提供するロボット掃除機を備えることにより、掃除地図上の特定の位置又は領域にロボット掃除機を移動させたり、該当領域の掃除を行わせたりするように制御することができ、該当領域の監視画像を提供することにより、遠隔監視効率及びシステムの運用効率を向上させ、ユーザの利便性を向上させることができるロボット掃除機、並びにそれを用いた遠隔監視システム及びその遠隔監視方法を提供する。
【解決手段】ロボット掃除機100は、掃除領域を撮影して監視画像を生成する少なくとも1つの監視カメラ110と、ロボット掃除機100を駆動し、掃除領域を探索して掃除地図を作成する制御ユニット130と、監視画像及び掃除地図を外部装置に送信し、外部装置から制御命令を受信する通信サーバ120と、を有する。
(もっと読む)
移動体装置及び移動制御プログラム
【課題】ロボットを、状況に応じて適切に移動制御する。
【解決手段】ロボットは、2輪速度差方式の移動部と、移動部に保持され、移動部とともに移動する上体部と、上体部に加わる外力ベクトルを取得する外力情報取得部52と、上体部に加わった外力ベクトルの作用点を、上体部の重心位置から並進方向に所定距離だけオフセットした位置に仮想的に置き換える作用点置き換え部54と、置き換え後の作用点を用いて並進方向及び旋回方向のそれぞれにメカニカルインピーダンス(慣性、粘性、弾性)を設定し、移動部の移動を制御する移動制御部56と、を備えている。
(もっと読む)
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
応対ロボット、応対制御方法、及び応対制御プログラム
【課題】ロボットが人に接近する動作を人の動きに応じて適切に制御できるようにする。
【解決手段】自律的に移動し、人に対する応対行動を行うロボットにおいて、人の位置及び動きを検知する人検知部23と、人検知部23により検知された情報に基づいて人の移動経路を予測すると共に人の移動方向の変化に応じて移動経路を修正する人経路予測部24と、人の移動経路に基づいて応対行動を実施するためにロボットが人に接近する移動経路を生成するロボット経路生成部25と、人の移動経路とロボットの移動経路との交点を想定する交点想定部26と、ロボットが移動可能な応対可能領域内に交点が存在するか否かを判定する判定部27と、交点が応対可能領域から外れた場合に応対行動のための移動を停止する停止部28とを備える。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
移動体
【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
ロボットのプログラム及び情報処理装置のプログラム
【課題】環境地図の再作成に要するコストを低減し、かつ環境地図をタイムリーに再作成することのできる技術を提供する。
【解決手段】所定領域内の固定物の配置位置を含む地図情報を記憶し、地図再作成の際、所定領域内をロボット10を移動させつつ(1)乃至(5)を繰返し実行する。(1)エンコーダ21を積算してロボットの自己位置を算出する(2)ロボットの所定視野角範囲内にある固定物及び移動可能物までの距離を測定する(3)測定した距離と、地図情報から得られる固定物までの距離とから補正自己位置を求める(4)測定値の内、移動可能物までの距離を表す測定値を抽出する(5)抽出した測定値と補正自己位置とから移動可能物の配置位置を算出する。そして、算出した移動可能物の配置位置を集約処理して新たな配置位置を求め、求めた新たな配置位置を外部に出力する。
(もっと読む)
バッテリー容量推定装置、その方法及びプログラム
【課題】移動経路で消費されるバッテリー容量を高精度に推定できるバッテリー容量推定装置、その方法及びプログラムを提供すること。
【解決手段】バッテリー容量推定装置は、地図情報を記憶する記憶手段と、地図情報における障害物の混雑の度合いを示す混雑度に基づいて、地図情報に対して安全率を設定する安全率設定手段と、記憶手段に記憶された地図情報において、現在位置から目的位置までの移動経路を算出する移動経路算出手段と、移動経路算出手段により算出された移動経路と、安全率設定手段により設定された地図情報の安全率と、に基づいて、移動経路で消費されるバッテリー容量を推定する容量推定手段と、を備えている。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
物品搬送設備
【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
走行体の追従制御システム及びその制御方法
【課題】平面上を自由に走行する先導無人車に後続無人車を追従させる追従制御システムを提供する。
【解決手段】追従システム1は、第一走行体20に配置され、第一走行体および第二走行体10の位置と車体方向を特定する走行体位置検出部2と、前記車体方向から複数の進行角度を発生させる進行角度発生部3と、進行角度ごとに将来制御パラメータを計算し、第二走行体の将来位置と第一走行体との距離を計算する第一差異計算部4と、将来制御パラメータと現在制御パラメータの差異を計算する第二差異計算部5と、複数の進行角度の中から最適進行角を選定する最適進行角選定部6と、最適進行角選定部6で選定された制御パラメータを駆動機構11に出力する走行指令部7で構成される。
(もっと読む)
経路計画装置、自律移動ロボット、及び移動経路の計画方法
【課題】安全性と移動性を効果的に両立しながら、未知の障害物が存在する環境内での移動ロボットの移動経路を決定することを可能にする。
【解決手段】ロボット1は、環境地図120に規定されている既知の障害物の位置及びその周囲を含む第1の領域と、環境地図120に規定されていない未知の障害物の位置及びその周囲を含み前記第1の領域に比べて広範囲に設定される第2の領域とを移動制限領域として、移動制限領域内の移動ロボットの通過が抑制されるように環境地図120に基づいて移動経路を決定する。
(もっと読む)
走行台車システム
【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
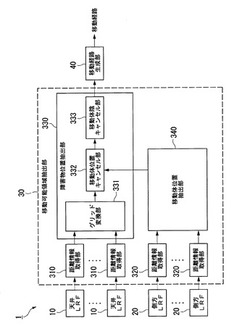
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
走行台車システム
【課題】 走行台車間の車間距離を短くできるようにし、かつ障害物の検出に死角が生じないようにする。
【構成】 障害物までの距離と障害物の方位を検出する障害物センサを走行台車に設ける。走行台車の走行ルートのマップを記憶し、障害物が存在すると走行台車の減速が必要になる検出エリアを、マップから走行台車の位置に基づき繰り返し作成する。障害物センサが検出した障害物中で、検出エリア内のものを検出し、検出した障害物との干渉を防止するように走行台車を減速制御する。
(もっと読む)
81 - 100 / 514
[ Back to top ]