
Fターム[5H301DD07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484) | 固定設置された装置から与えられるもの (195)
Fターム[5H301DD07]に分類される特許
161 - 180 / 195
物品処理設備
【課題】 救援車による救援作業の作業性を向上させることができる物品処理設備を提供する。
【解決手段】 床面上を走行自在な物品搬送用の搬送車4を予め設定された物品搬送用の走行経路L2に沿って走行させるべく搬送車4の走行を制御し、且つ、物品処理設備内の機器の異常発生が異常検出部にて検出されると、床面上を走行自在な機器救援用の救援車6を物品搬送用の走行経路L2とは異なる経路として予め設定された救援用走行経路L3に沿って異常発生箇所に走行させるべく救援車6の走行を制御する制御手段を備える。
(もっと読む)
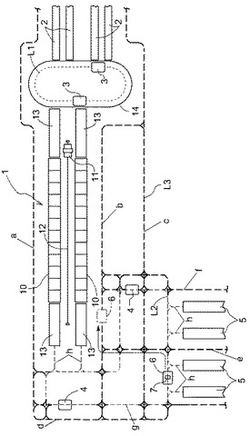
搬送システム

【課題】 台車の台数や、走行ルートにおける分岐部、交差部が増加しても、各台車の制御を容易に行うことができる搬送システムを提供すること。
【解決手段】 移送装置1によるワークの移送と台車2によるワークの搬送とを組み合わせて行い、前記台車2が、所定の走行経路を走行すると共にワークの受け渡しを行うステーション3で停止し、ステーション3に停止した台車2と前記移送装置1との間でワークが受け渡しされる搬送システムであって、前記台車2の走行経路に関する情報を記憶し、前記走行経路の分岐部近傍に配置される分岐部用記憶体11と、前記台車2に設けられ、前記分岐部用記憶体11に記憶された情報を読み取る読み取り手段8とを備え、台車2が前記分岐部に接近する際に前記台車2に設けられた読み取り手段8が前記分岐部近傍に設けられた分岐部用記憶体11から台車2の走行経路に関する情報を読み取り、台車2はその情報に基づいて分岐部から延びる複数の分岐路の一つに進入するように構成されている。
(もっと読む)
物品搬送設備
【課題】 運転制御手段と物品搬送車との間での通信および複数の物品搬送車の隣接するものどうしの間での通信が行えないようになるのを回避する物品搬送設備の提供。
【解決手段】 運転管理用の通信手段Tとして、運転制御手段14と物品搬送車3との間での通信および複数の物品搬送車3の隣接するものどうしの間での通信を空間光伝送方式により行う光式通信手段17、および、運転制御手段14と物品搬送車3との間での通信および複数の物品搬送車3の隣接するものどうしの間での通信を電磁波伝送方式により行う無線通信手段18が、並行して通信作動を行うように設けられ、運転制御手段14および車体制御手段Hが、光式通信手段17による通信情報を優先使用し、かつ、光式通信手段17による通信情報が得られないときには無線通信手段18の通信情報を使用するように構成されている。
(もっと読む)
ずれ量検出装置
【課題】床上を走行する移動体において、予め決められた経路に対する移動体の移動方向のずれを検出する。
【解決手段】床面に位置情報発信体が配設された室内を、予め決められた移動経路に沿って移動する移動体に搭載されるずれ量検出装置において、位置検出用交信範囲に存在する前記位置情報発信体から取得した位置情報から前記移動体の現在位置を検出する第1の現在位置検出手段と、位置検出用交信範囲を包含するずれ検出用交信範囲に存在する前記位置情報発信体の取得した位置情報から前記移動体の現在位置を検出する第2の現在位置検出手段と、検出された現在位置を移動経路と照合し前記移動体の移動方向を特定する移動方向特定手段と、前記各現在位置検出手段により検出された各現在位置から移動方向に対するずれ量を検出するずれ量検出手段と、を備える。
(もっと読む)
搬送台車システム
【構成】 搬送台車24の行先がポイント20からポイント18に変更されると、搬送台車24は最寄りの分岐ポイント10までに新たな走行ルートを算出できるように速度制御する。搬送台車24は、不要になったブロッキングの、分岐ポイント10の直進、合流ポイント14の直進、分岐ポイント12の分岐をキャンセルし、分岐ポイント10の分岐のブロッキングを再要求し、新たな走行ルートに基づいて走行する。
【効果】 行先変更時に搬送台車が停止する必要がないので、搬送効率が改善する。
(もっと読む)
搬送車
【課題】複数の駆動輪を有し、曲率の異なる部分を有する軌道に案内されて所定の走行経路を走行する搬送車において、各駆動輪が位置する軌道の曲率が異なることに起因する、駆動輪のスリップや搬送車の車体へ無理な負荷がかかることを防止する。
【解決手段】各駆動輪4・5をそれぞれ制御する個別のドライバ(インバータ34・35)と、各駆動輪4・5のいずれもが軌道における同じ曲率の部分に位置する場合には前記各ドライバに同じ指令値を与え、各駆動輪4・5が軌道における異なる曲率の部分に位置する場合には前記各ドライバに曲率に応じた指令値を与える制御手段と、を備える構成とした。
(もっと読む)
移動体の経路生成装置
【課題】ローカルミニマムを回避し、高速な経路計画を実現するための経路生成装置を提供する。
【解決手段】本発明の提供する装置は、移動体、障害物、および目標物の位置および形状の情報に基づき移動空間内のマップを生成するマップ生成部と、マップを用いて、移動体、障害物、および目標物の相対位置関係に基づく引力ポテンシャルおよび斥力ポテンシャルを計算し、これらの和である合成ポテンシャルを生成する合成ポテンシャル生成部と、合成ポテンシャルに基づいてマップ内の経路探索を行い、該経路探索の収束位置がローカルミニマムかどうかを判別するローカルミニマム判別部と、収束位置がローカルミニマムの場合、該収束位置のポテンシャルを所定値だけ増加させた仮想ポテンシャルを生成する仮想ポテンシャル生成部と、収束位置が目標位置の場合、経路探索の結果に基づいて移動体の移動経路を生成する経路生成部と、を備える。
(もっと読む)
搬送台車の障害物検出装置
【課題】天井走行式搬送台車を用いる搬送システムにおいて、的確に障害物を検出することにより安全性を確保することができる搬送台車の障害物検出装置を提供する。
【解決手段】 搬送台車の障害物検出装置1では、測距ビームスキャン検出装置2により測距ビームを予め登録した距離・角度でスキャンさせることにより形成される仮想平面で定義される監視領域内において障害物を検出する。測距ビームスキャン検出装置2が障害物を検出した場合は、障害物報知装置3で警告灯3aを点灯し、警告音出力装置3bで警報を鳴らす。又は、台車制御装置4で無線又は有線の通信手段4aを介して搬送台車10を減速・停止さる。尚、測距ビームスキャン検出装置2は、障害物を検出した場合に光の放射を停止する安全対策機能が付加されている。
(もっと読む)
表示案内装置、ロボットシステム及びロボットシステムにおける表示案内方法
【課題】移動ロボットに対して移動経路を表示案内し、周囲の人に対して移動ロボットの移動の状況を表示案内する。
【解決手段】移動ロボットの移動を誘導するための表示案内を行う表示案内装置において、照明光を発する照明部品をそれぞれ有し、前記移動ロボットが移動すべき経路に沿って床面に敷設される複数の表示パネルと、前記移動ロボットから送信される、該移動ロボットの移動の状況を示す移動状況信号を受信する受信手段と、前記移動状況信号に基づいて、前記移動ロボットの現在位置に対応する表示パネル位置を判定する位置判定手段と、前記位置判定手段により判定された表示パネル位置から前記ロボットが次に移動すべき位置に対応する表示パネルの照明部品を点灯制御する点灯制御手段とを具備する。
(もっと読む)
物品搬送設備
【課題】 構成の複雑化を招くことなく、デッドロック状態を極力早く回避すること。
【解決手段】 管理部5は、複数の移動経路1のすべてから複数の移動体2が交差点D2に向けて同時に進入する場合には、退避対象の移動体2aに対して、退避用運行指令情報T1を移動制御手段4に指令し、かつ、退避対象の移動体2a以外の移動体2に対して、停止用運行指令情報T2を移動制御手段4に指令し、次に、退避対象の移動体2a以外の移動体2の一つに対して、指定通過用運行指令情報T3を移動制御手段4に指令する形態で、退避対象の移動体2a以外の移動体2に対して、通過用運行指令情報を移動制御手段4に順次指令し、その後、退避対象の移動体2aに対して、復帰通過用運行指令情報を移動制御手段4に指令するように構成されている。
(もっと読む)
物品搬送設備
【課題】 物品搬送車を無駄に走行させないようにしながら、搬送効率の低下を防止できる物品搬送設備の提供。
【解決手段】 走行制御手段は、走行予定経路1の両側方について、物品搬送車2の横幅方向において走行予定経路1から干渉物Wまでの非干渉距離を、走行予定経路1の経路長手方向の位置と関連付けて記憶して、経路走行の障害となる障害物Bが存在する場合に、物品搬送車2の横幅方向での障害物Bの存在位置、および、非干渉距離に基づいて、物品搬送車2を走行予定経路1から横方向に離脱させて前進させたのち走行予定経路1に復帰させる形態で、障害物Bを迂回させるように走行させる迂回走行を行ったときに、干渉物Wが迂回走行の障害となるか否かを判別し、干渉物Wが迂回走行の障害とならないときには、迂回走行を行うべく、走行手段の作動を制御するように構成されている。
(もっと読む)
物品搬送設備
【課題】 現在位置を見失った移動体の現在位置を検出できるまでにかかる時間の短縮化を図る。
【解決手段】 移動経路1には、予め計測された基準位置HPからの距離を記憶手段23に記憶させた仮基準位置Pが移動経路1に沿って複数設けられ、移動体2には、仮基準位置Pを検出する仮基準位置検出手段が設けられ、制御手段は、現在位置を見失った移動体2については、仮基準位置検出手段の検出情報に基づいて、その移動体2を仮基準位置Pまで移動させるべく、移動手段の作動を制御し、かつ、記憶手段23に記憶された基準位置HPからその仮基準位置Pまでの距離、および、仮基準位置検出手段が仮基準位置を検出してから移動距離検出手段にて検出される仮基準位置からの移動距離に基づいて、移動体2の現在位置を検出するように構成されている。
(もっと読む)
自律移動装置
【課題】自律移動装置において、複数の自律移動装置が互いに他の自律移動装置の移動を予測して、自律移動装置同士が干渉によるデッドロック等を起こすことなく、全体として効率良く稼働することをことを可能とする。
【解決手段】自律移動装置1は、記憶手段11と、走行手段13と、走行経路を生成する経路生成手段16と、障害物を回避しながら走行経路に沿って目的地まで移動するように走行手段13を制御する走行制御手段17と、他装置と情報の送受信を行う通信手段18と、を備える。記憶手段11には、各ノードと対になる待機位置が設定され、走行制御手段17は、自律移動装置1が到達ノードから次の目標ノードに向かう際に他の自律移動装置の走行状態を制御装置2から取得し、他の自律移動装置が目標ノードの方向から到達ノードに向かって移動していると判断した場合、到達ノードと対になる待機位置で待機するように走行手段13を制御する。
(もっと読む)
搬送台車システム
【構成】 ゾーンコントローラはポーリングにより管理下の天井走行車の位置を定期的に受信する。位置の受信に失敗した天井走行車がある場合、前回の位置で、その上流側にあった天井走行車の現在位置(更新後の位置)よりも下流側の位置を推定する。そしてこの位置に基づいて、分岐部9などの走行許可や、ロードポートからの物品の搬出を割り付ける。
【効果】 管理下の天井走行車からの位置を受信できなかった場合でも、交差点でデッドロックが生じない。
(もっと読む)
移動体の位置情報補正装置及び方法、その装置を制御するコンピュータプログラムを保存するコンピュータで読み取り可能な記録媒体
【課題】比較的簡単にエラーを累積させずに移動体の位置情報を正確に補正できる移動体の位置情報補正装置及び方法、その装置を制御するコンピュータプログラムを保存するコンピュータで読み取り可能な記録媒体を提供する。
【解決手段】移動体の位置及び方位角のうち少なくとも一つについての情報である位置情報を補正する移動体の位置情報補正装置において、少なくとも一つのビームを発生させるビーム発生部10と、測定された位置情報を入力し、発生したビームを検出し、入力した測定された位置情報を、検出したビームを利用して補正する位置情報補正部12と、を備え、位置情報補正部12は、移動体に装着される。
(もっと読む)
ロボットの走行軌道制御システム
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
搬送車システム
【構成】 各ゾーンコントローラは、特定エリアへのブロッキング要求を天井走行車から受け付けると待行列に追加し、待行列の先頭の天井走行車にブロッキング許可を与え、走行を完了するとブロッキングを解除する。待行列の天井走行車の台数を、特定エリアの渋滞状況を示す指標として時間平均を求め、コントローラから天井走行車にアナウンスする。
【効果】 走行経路の渋滞状況を的確に把握できるので、効率的な走行経路を天井走行車が選択できる。
(もっと読む)
物品搬送システム
【課題】 本発明の目的は、複数の搬送指令に基く物品の搬送が連続しても、走行台車の無駄な走行を防止又は抑制することができる物品搬送システムの提供にある。
【解決手段】 搬送指令を受けて台車走行経路15を走行する物品搬送用の走行台車14を備え、台車走行経路15は、走行台車14が入庫すべき物品Wを受け取る入庫位置11と、走行台車14が保管先に対して物品Wを出入する保管位置18と、走行台車14が出庫すべき物品Wを払い出す出庫位置17と、各位置16〜18に通じるメイン分岐点20と、搬送指令待ちの走行台車14に対して搬送指令を出す第1指令位置22と、物品搬送後に第1指令位置22へ向かう走行台車14に対して次の搬送指令を出す第2指令位置24を含み、前記メイン分岐点20は、第1指令位置22と第2指令位置24との間に設定される、又は第2指令位置に含まれる。
(もっと読む)
災害救助ロボット、及び災害救助支援システム
【課題】 居室内に予め設置され、平常時にインターフォンとして機能し、災害時に災害救助機能を有する災害救助ロボットを利用した災害救助支援システムを提供することを課題とする。
【解決手段】 支援システム1は、複数の居室9にクローラ機構部をコンパクトに格納した状態で設置された複数のロボット2と、該ロボット2と無線通信ネットワーク10を介して種々の情報を送受可能に形成され、災害の発生時には、ロボット2を遠隔制御し、居室9に取り残された要救助者11の探索及び発見に利用可能な支援コンピュータ3とによって主に構成されている。ここで、平常時及び災害時に取得され、支援コンピュータ3に記憶された居室情報20等を利用し、要救助者11の早期の発見が可能となる。
(もっと読む)
走行制御装置
【課題】走行制御装置において、搬送用の自律移動装置の稼働状況に応じて自律移動装置を選出し、最適な搬送ジョブ割り付けを可能とする。
【解決手段】走行制御装置1は、搬送要求入力手段11と、通信手段12と、最短時間で搬送ジョブを完了できる自律移動装置2を特定する演算を行う演算手段13と、入力手段14と、記憶手段15と、を備え、搬送要求を受けて、所定の搬送ポイントまで荷物Wの搬送を行なうように複数台の自律移動装置2に搬送ジョブを割り付けてその走行を制御する。演算手段13は、搬送要求信号に応じて一の自律移動装置2の現在位置から荷物の受け渡し地点に到達するまでの移動距離と、他の自律移動装置2との衝突を回避するために要する待ち時間と、を考慮してその自律移動装置2が搬送ジョブを完了するのに要する搬送時間を求め、この搬送時間が最短時間となる自律移動装置2を特定して搬送ジョブを割り付ける。
(もっと読む)
161 - 180 / 195
[ Back to top ]