
Fターム[5H301DD07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484) | 固定設置された装置から与えられるもの (195)
Fターム[5H301DD07]に分類される特許
41 - 60 / 195
ロボット掃除機、並びにロボット掃除機を用いた遠隔監視システム及びロボット掃除機を用いた遠隔監視方法
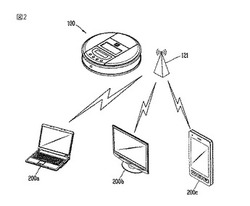
【課題】掃除又は走行時に作成した掃除地図を提供し、特定の位置又は領域の監視画像を提供するロボット掃除機を備えることにより、掃除地図上の特定の位置又は領域にロボット掃除機を移動させたり、該当領域の掃除を行わせたりするように制御することができ、該当領域の監視画像を提供することにより、遠隔監視効率及びシステムの運用効率を向上させ、ユーザの利便性を向上させることができるロボット掃除機、並びにそれを用いた遠隔監視システム及びその遠隔監視方法を提供する。
【解決手段】ロボット掃除機100は、掃除領域を撮影して監視画像を生成する少なくとも1つの監視カメラ110と、ロボット掃除機100を駆動し、掃除領域を探索して掃除地図を作成する制御ユニット130と、監視画像及び掃除地図を外部装置に送信し、外部装置から制御命令を受信する通信サーバ120と、を有する。
(もっと読む)
無人搬送車走行方法及び無人搬送車走行システム

【課題】合流点や交差点での無人搬送車の待ち合わせの発生を抑えることができる無人搬送車走行方法及び無人搬送車走行システムを提供する。
【解決手段】無人搬送車走行システム1は、複数台の無人搬送車(AGV)2と、コントローラ6と、メモリ8とを備えている。無人搬送車2は、予め決められた走行経路に沿って走行し、移載装置に荷物を搬送する。メモリ8には、無人搬送車2が走行する走行経路を複数のブロックに分割してなる走行経路ブロックデータが設定記憶されている。コントローラ6は、無人搬送車2により搬送される荷物が移載装置に到着する予定時刻を計算し、出発地ブロックから目的地ブロックまでの各ブロックにおける無人搬送車2の通過時刻を、目的地ブロックから出発地ブロックに向かって順次予約していき、無人搬送車2が走行を開始する時刻を求め、その走行開始時刻のデータを当該無人搬送車2に送信する。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
物品搬送設備
【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
コンテナの移送方法およびコンテナ用保管システム
複数のコンテナを倉庫に移送する方法を提供する。この方法は、1台以上のコンテナをその上に受け取って輸送し、所定の階(18a)に上昇および下降するように構成されたエレベータ(22)を備えた、少なくとも1つの複数階層構造(12)を提供することを含む。各階(18a)は、1台のコンテナを受け取ってその内部に保管する大きさに形成された複数の仕切室(24)を備えている。また、前後および側方に運動して、その上にコンテナを受け取るように構成された複数の無人自動搬送台車(AGV)を提供し、AGVのうちの受取AGV(rAGV)上にコンテナ各々を受け取り、受取コンテナを含むrAGVを、構造体(12)の目標階(18a)における目標仕切室(24)に位置付けることを含む。 (もっと読む)
走行台車システム
【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
搬送車システム
【構成】 複数台の搬送車を、同一走行ルートに沿って、搬送車間の干渉を回避しながら、往復動させる。搬送車が搬送指令を実行するために走行する際の、搬送車間の干渉の有無を判断し、干渉が存在する際に、干渉を回避しながら搬送指令を実行するためのパターンを複数生成し、生成したパターンから、搬送車がパターンを実行するための時間が短いものを選択して、搬送車に実行させる。
【効果】 干渉を回避しながら短時間で搬送指令を実行でき、またパターンを短時間で生成できる。
(もっと読む)
対象者検出システム、対象者検出方法、対象者検出装置および移動式情報取得装置
【課題】対象者が固定カメラの検出範囲内に所在する場合のみならず、対象者が固定カメラの非検出範囲に所在する場合を含めて対象者の所在や行動を検出すること。
【解決手段】管理装置は、固定カメラAを用いて対象者のアピアランス情報を検出し、検出したアピアランス情報に基づいて対象者の絞り込みを行う。また、管理装置は、固定カメラAおよび固定カメラBによるアピアランス情報の検出結果を用いて対象者の異常を検知する。そして、管理装置は、対象者の異常を検知すると、固定カメラAおよび固定カメラBの非検出範囲へ移動ロボットを移動させ、移動ロボットを用いて検出した顔情報に基づいて対象者を特定する。
(もっと読む)
自律走行ロボットを利用した地図生成方法、これを利用した最適走行経路算出方法およびこれらを遂行するロボット制御装置
【課題】本発明は自律走行ロボットを利用した空間地図生成方法を提供する。
【解決手段】本発明に係る地図生成方法は、空間に配置された複数の位置座標系の各々から出力されたロボットローカル座標からロボットグローバル座標を計算するステップ、および計算されたロボットグローバル座標に基づいて空間における複数の位置座標系各々の位置を推定し、推定された複数の位置座標系各々の位置に基づいて空間地図を生成するステップを含む。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、下位のコントローラだけで運用試験を行うときに自動運転を可能にする。
【解決手段】搬送車システムは、搬送車を搬送させるための搬送車システムであって、複数のストッカ(51,53,55,57)と、搬送車(44,48)と、複数のコントローラ(52,54,56,58)とを備えている。ストッカは、内部で物品を搬送可能である。搬送車は、複数のストッカ間で物品を搬送可能である。複数のコントローラは、互いに通信可能であり、複数のストッカおよび搬送車を制御する。コントローラは、搬送制御部61と、シナリオ記憶部63と、搬送指令作成部62とを有している。搬送制御部61は、搬送指令を実行することで搬送制御を行う。シナリオ記憶部63は、複数の搬送指令作成情報を含む搬送パターンシナリオを記憶する。搬送指令作成部62は、搬送指令作成情報に対応する搬送指令を作成する。
(もっと読む)
自律走行装置
【課題】鉱山における土砂運搬用トラックなどの車両の自律走行技術が求められている。安全かつ高効率の土砂運搬作業実現のため、鉱山で高速走行する車両同士が安全に擦れ違えるように車両の走行を制御する必要がある。
【解決手段】通常は単独走行用の道路を車両が走行し、対面車両が来た場合は擦れ違い用の道路に走行路を切り替えるために、各車両が走行時に自車付近の路面状態を測定して得た路面情報を、運行管理を行っている運行管理センタに送信してセンタ側で集約し、地点ごとの路面状態がセンタから取得できるようにする。そして、擦れ違う自律走行トラック同士が擦れ違い用の道路に切り替える際には、センタからの路面情報を元に路面状態が悪化している地点を避けて走行レーンを切り替える。
(もっと読む)
コークス炉用移動機械の走行制御方法
【課題】コークス炉用移動機械の減速時にスリップが生じてもコークス炉用移動機械が目標停止位置から大きくずれた位置で停止したり、あるいはコークス炉用移動機械が制限速度を超えた速度で速度制限域に進入したりすることなくコークス炉用移動機械の走行を制御することのできるコークス炉用移動機械の走行制御方法を提供する。
【解決手段】コークス消火車などのコークス炉用移動機械の減速時にコークス炉用移動機械の実走行速度VCと目標走行速度VOとの速度偏差ΔVを予め定めた閾値Xと比較し、速度偏差ΔVが閾値Xを超えたときにコークス炉用移動機械の機械的ブレーキ装置を作動させるブレーキ作動信号を送出してコークス炉用移動機械の走行を制御する。
(もっと読む)
自律移動システム及び自律移動装置
【課題】自律移動装置が指定された経路から逸れることが無い移動計画を行うことができる自律移動システム及び自律移動装置を提供する。
【解決手段】管理装置は、通信装置37を介して各自律移動装置2a、2bから受信する集約データに基づいて、地図上の位置座標と、自律移動装置2a、2bで推定される自己位置が不確かになる程度を判断する誤差分布データとを対応付けて登録する誤差登録地図を管理する地図管理部310と、この地図管理部310で管理される誤差登録地図310cに基づいて、各自律移動装置2a、2bが経路から逸れることが無い又は逸れる確率を低くする、動作及び/又は経路を指定する移動計画を行う運用管理部320を備える。
(もっと読む)
物品搬送設備
【課題】移動体同士の衝突を防止しながら、移動体を合流部に合流走行させることができる物品搬送設備の提供。
【解決手段】第1合流経路27、第2合流経路28、及び、合流後経路29の夫々には、個別に通信用中継装置26が設けられ、通信用中継装置26の夫々は、シート状アンテナにて構成されたアンテナ部30と、アンテナ部30を用いて移動体側の通信装置25との間での通信により取得した移動体情報とその移動体情報をどの経路に配設されたアンテナ部30により取得したかを示す識別情報とを関連付けて管理手段24との間で通信自在な中継装置本体33とを備え、管理手段24は、中継装置本体33から受信した移動体情報と識別情報とに基づいて、どの経路に移動体3が存在するのかを判別して、複数の移動体3の運行を管理する。
(もっと読む)
移動体の運行管理システム
【課題】無線信号が干渉する等のおそれが少ない状態で、移動体との間での無線通信を行うことを可能にしながら、移動体が走行区間の境界に至ったときに、通信対象である通信用中継装置を切り換えることを適正に行えるようにする。
【解決手段】複数の走行区間毎に無線通信を行う複数の通信用中継装置6のアンテナ部14が、無線信号を二次元方向に伝播して、無線通信可能な通信領域を表面に沿って形成する状態で出力させるシート状のアンテナ本体部15と、接続線13が接続される接続部16とを備えて構成され、アンテナ本体部15が、経路長手方向に沿って長尺状に形成され、且つ、互いに隣接する状態で経路長手方向に沿って並ぶ状態で設置され、移動体1が境界を通過する通過タイミングに至ったときに切り換え判別用条件が満たされたことが判別されるように、アンテナ本体部15における接続部16の接続位置が設定される。
(もっと読む)
移動体の運行管理システム
【課題】外部機器との間で無線信号が干渉したり、通信している情報が外部に漏洩する等のおそれが少なく、しかも、通信のための電力消費も少ないものに抑制した状態で、通信用中継装置と移動体側の通信装置との間で無線通信を行うことが可能な移動体の運行管理システムを提供する。
【解決手段】移動経路3に沿って移動する移動体1に備えさせた移動体側の通信装置との間で無線通信を行う通信用中継装置6を、管理手段7との間で管理情報を通信自在に通信線8により接続された中継装置本体12と、中継装置本体12に接続線13にて接続され、移動体側の通信装置との間で管理情報を無線信号にて通信するアンテナ部14とを備えて構成し、アンテナ部14を、長尺状でかつ横断面形状が平板状のシート状に形成され且つ厚さ方向に沿う通信可能領域を表面全体に形成するシート状アンテナ14Aにて構成されて、移動経路3に沿う状態で設置する。
(もっと読む)
無人搬送車の交差点制御装置及び交差点制御方法
【課題】交差点内の障害物を直接検出して、交差点における進入、退出の制御を行う無人搬送車の交差点制御装置及び交差点制御方法を提供する。
【解決手段】交差点Xを、エリアA、B1、C1、D1、E1、B2、C2、D2、E2に分割すると共に、各エリアにおける障害物の有無及び変化を検知する光エリアセンサ22を交差点Xに設け、交差点Xに進入してきたAGV11を、エリアB2に待機させると共に、光エリアセンサ22を用いて、全エリアにおける障害物の検知を行い、エリアA、B1、C1、D1、E1に障害物が無い場合、待機させたAGV11に交差点Xへの進入許可を与える。
(もっと読む)
ネットワークロボットシステム、ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【構成】 ネットワークロボットシステム10は、ロボット12を含み、ロボット12はサービスの提供に係る移動経路の生成要求の要求メッセージをロボット制御装置102に送信する。ロボット制御装置102は、要求メッセージを受けて、ロボット12同士が衝突しないように、当該要求メッセージについての移動経路を生成する。そして、ロボット制御装置102は、移動経路のうちの一定時間(T秒)分の移動経路についての移動経路データをロボット12に送信する。
【効果】 他のロボットと干渉することなく、確実に移動することができる。
(もっと読む)
給紙無人搬送車システム
【課題】無人搬送車に搭載される載荷用テーブルに必要とされるスライドストロークを短縮し、無人搬送車のコンパクト化を実現する給紙無人搬送車システムを提供する。
【解決手段】輪転機と輪転機に対して新聞巻取紙を装着・回収する無人搬送車とを有する給紙無人搬送車システムにおいて、輪転機の給紙エリアに無人搬送車を誘導する誘導ラインが、一つの輪転機に対して複数設けられていることにより上記の課題を解決する。
(もっと読む)
41 - 60 / 195
[ Back to top ]