
Fターム[5H301DD07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484) | 固定設置された装置から与えられるもの (195)
Fターム[5H301DD07]に分類される特許
21 - 40 / 195
搬送用走行体の走行制御方法
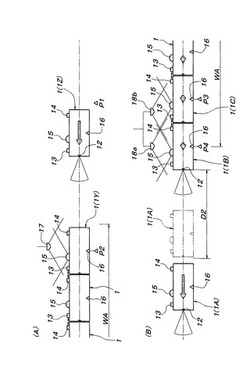
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム

【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
搬送車システム
【課題】複雑な処理を行うことなく搬送車の集中を防ぎ、搬送車を効率良く運用することができる搬送車システムを提供する。
【解決手段】第一ステーションエリア20と第二ステーションエリア30との間の搬送経路を走行し物品の搬送を行う複数の搬送車200と、複数の搬送車200を制御する制御装置100とを備える搬送車システム10であって、制御装置100は、ステーション21への物品の搬出に向かう搬送車200であって、搬送経路内の所定区間を走行する搬送車200である対象搬送車の台数を計測する計測部110と、計測部110が計測した台数が所定の値を超えた場合に、対象搬送車に含まれる少なくとも1台の搬送車に、ステーション21への物品の搬出後に、ステーション22からの物品の搬入を行わせる搬出入指示部120とを備える。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
自律移動体を用いた監視システム、監視装置、自律移動体、監視方法、及び監視プログラム
【課題】特徴検索機能を用いて適切な移動経路による巡回を行う。
【解決手段】監視区域を所定の経路で巡回する少なくとも1つの自律移動体と、該自律移動体を用いて前記監視区域を監視する監視装置とからなる監視システムにおいて、前記監視装置は、前記監視区域に設置された少なくとも1つの撮像手段により撮影された画像を用いて、特定人物を抽出する特定人物抽出手段と、前記特定人物抽出手段により得られた画像を撮影した撮像手段の位置情報から重要監視地点を選出する重要監視地点選出手段と、前記重要監視地点選出手段により得られる地点に対応させた巡回要求情報を生成し、生成した巡回要求情報を前記自律移動体に指示する巡回指示手段とを有し、前記自律移動体は、前記監視装置から得られる巡回要求情報と、予め設定された巡回経路とを用いて、巡回経路を設定する巡回経路設定手段を有する。
(もっと読む)
全方向移動体操作システムおよび全方向移動体操作方法
【課題】操作装置によって全方向移動体を簡易に遠隔で操作する。
【解決手段】全方向移動体500の車両目標速度計算部504は、操作対象である全方向移動体500の存在する車両位置Cを全方向移動体を操作する基準位置を示す操作体基準位置との相対的な位置関係により表わし、かつ、操作装置400に与えられる操作に応じた操作量を、操作体の位置を示す操作体基準位置Sを原点とする座標系において表わされる目標位置Oにより表わすことにより、この車両位置Cから目標位置Oまでの目標移動速度ベクトルを決定する。車輪速度指令演算部505は、この目標移動速度ベクトルに従って基体を駆動させるよう、車輪駆動部506に指示する。
(もっと読む)
搬送システム、および、台車割り付け方法
【課題】搬送システムにおいて自走式台車に搭載されるバッテリーの寿命を維持する。
【解決手段】バッテリー115を搭載し荷物を搬送する自走式の台車101と、充電ステーションと、管理手段とを備える搬送システムであって、バッテリー115の放電量を示す情報である放電量情報を作成する放電量作成部116と、バッテリー115に許容される放電量を示す情報である残量情報を放電量情報に基づき作成する残量作成部117と、要求される仕事に含まれる目的地の位置を示す情報である目的地情報と台車101の位置を示す情報である現在地情報とに基づき、要求される仕事に必要な放電量を示す情報である必要量情報を作成する必要量作成部と、残量情報から必要量情報を減じて得られる差が第一閾値を上回る場合、要求される仕事を台車101に割り付ける割付部とを備える。
(もっと読む)
走行車システム
【課題】走行車の走行経路レイアウトの自由度を上げる。
【解決手段】走行車システム1は、走行車10と、走行時給電装置60と、停車時給電装置70と、を備える。走行車10は、受電コア51と受電コア51に巻かれたピックアップコイル53とを含む受電ユニット23と、受電ユニット23を介して受けた電力を蓄えるバッテリ27と、を有する。走行時給電装置60は、走行車10の走行時に、受電ユニット23に対向して非接触にて受電ユニット23に給電する一対の給電線63を有する。停車時給電装置70は、受電ユニット23に対向する給電コイル79を有し、走行車10の停止時に非接触にて受電ユニット23に給電する給電部75を有する。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
無人搬送車および走行制御方法
【課題】自車位置の推定精度を向上させる無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】計測データと地図データ132とのマッチングにおいて、不一致箇所が検出されても、その不一致箇所をマッチングの対象から除外するマスクエリア510を、地図データ132において設定することを特徴とする。無人搬送車の位置推定の際には、その不一致箇所を除外した計測データを用いる。マスクエリア510には、無人搬送車の走行エリアにおいて、レーザ距離センサで計測するたびに状況が変わるエリア(例えば、パレット置場や、充電器置場など)が設定されるのが望ましい。
(もっと読む)
搬送車システム
【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
生産設備制御システムおよび生産設備制御方法
【課題】作業者が生産設備の電源制御の指示を認識することができる生産設備制御システムを提供する。
【解決手段】本発明の生産設備制御システム100は、設備制御部120、放送装置130、および情報収集器140を有する。設備制御部110および放送装置120は、可聴音帯域の特定周波数の信号レベルを特定周波数より低い周波数で周期的に変化させて生成された音波を送信する。情報収集器140は、音波を受信して特定周波数の信号レベルを選択的に抽出し、抽出された特定周波数の受信信号レベルの変動が設備制御部120による送信信号レベルの周期的な変化に対応する場合、特定周波数の周波数成分を解析した結果に基づいて制御対象設備150,160に対して電源制御または運転制御を実行する。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
無人走行車両の誘導装置及び無人走行車両の誘導方法
【課題】GPSが使用できない場所でも無人走行車両を精度良く目標地点へ到達させることができる誘導装置及び誘導方法を得ることを目的とする。
【解決手段】誘導装置は、ステップ102において、無人走行車両が有するカメラで撮影された撮影画像から指定された複数の教示点Pn、及び無人走行車両が移動する移動領域を平面で示した移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を導出する。そして、誘導装置は、ステップ116において、無人走行車両が導出された現在位置を起点として目標地点まで自律走行している途中で、計測手段による計測誤差の累積値が所定値に達した場合に、無人走行車両が有するカメラで新たに撮影された撮影画像から指定された複数の教示点Pn、及び移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を再び導出する。
(もっと読む)
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
方向装置およびそれを用いた動作システム
【課題】掃除ロボットを制御する方向装置、およびそれを用いた動作システムを提供する。
【解決手段】掃除ロボットの走行ルートを制御する方向装置であって、前記掃除ロボットによって発せられ、エンコードされた無線信号を受ける受信ユニット、少なくとも1つの無線信号を発する送信ユニット、および前記受信ユニットが前記エンコードされた無線信号を受けた時、前記掃除ロボットの走行ルートを制御する第1の方向無線信号を発するように前記送信ユニットを有効にする制御ユニットを含むことを特徴とする方向装置を採用した。
(もっと読む)
21 - 40 / 195
[ Back to top ]