
Fターム[5H301GG23]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 同一対象を検出する手段が複数個あるもの (85)
Fターム[5H301GG23]の下位に属するFターム
異なる特性の検出手段であるもの (25)
選択的に作動させるもの (6)
Fターム[5H301GG23]に分類される特許
1 - 20 / 54
無人走行体を用いた環境情報の取得システム
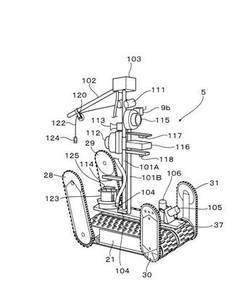
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても、無人走行体の遠隔操縦を円滑に行うことができ、かつ構築物内の状況を明確に把握可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105及び走査式三次元測距装置106を搭載する。走査式三次元測距装置106の検出データから作成される三次元画像を表示装置302に表示し、無人走行体5を遠隔操縦する際の参照データとして利用する。また、走査式二次元測距装置105の検出データをUSBメモリ306に順次記憶し、このUSBメモリ306に記憶された走査式二次元測距装置105の検出データを合成することにより作成される三次元画像を、構築物内の環境情報として利用する。
(もっと読む)
走行制御装置および車両

【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
走行制御装置および車両
【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
自動追尾式自走台車
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
自己位置推定装置、自己位置推定方法およびプログラム
【課題】自己位置を正確に推定することが可能な自己位置推定装置、自己位置推定方法およびプログラムを提供する。
【解決手段】自己位置推定装置は、撮影部、距離算出部、ランドマーク位置取得部、自己位置推定部、移動位置予測部、観測尤度計算部、視野内ランドマーク抽出部、撮影角度変更部、撮影制御部を有している。ランドマーク位置取得部は、各ランドマークの位置を取得する。自己位置推定部は、取得された画像、算出された距離、および上記位置に基づき自己位置を推定する。移動位置予測部は、推定された自己位置に基づき予測位置を算出する。撮影角度変更部は、視野内ランドマーク抽出部が抽出した視野内ランドマークについて観測尤度計算部が計算した観測尤度と、視野内ランドマークの観測角度とに応じて撮影角度を変更する。撮影制御部は、変更後の撮影角度で撮影した画像に基づき自己位置を更新する。
(もっと読む)
移動ロボット
【課題】他の物体に接触したことによる移動を、自己位置推定に反映することができる移動ロボットを提供する。
【解決手段】本発明の移動ロボットは、移動ロボットが他の物体に接触したことを検出する接触検知センサと、接触検知センサの検出結果に応じた、接触による移動を推定した接触移動推定モデルに基づいて、接触による移動ロボットの移動量を推定する移動量推定部と、移動量推定部によって推定された移動量に基づいて、自己位置を推定する自己位置推定部を有する。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、独立して作成された複数の地図の座標系が異なる場合であっても、高精度にこれら複数の地図の座標系を統合することを目的とする。
【解決手段】ロボットの第1のセンサの計測情報に基づき予め生成された第1の地図と、ロボットの各位置での第1のセンサの計測情報とに基づいて第1の地図上の自己位置を推定し、第2のセンサの計測情報に基づき予め生成された第2の地図と、各位置での第2のセンサの計測情報とに基づいて第2の地図上の自己位置を推定し、ロボットの第1の地図上の第1の移動軌跡と第2の地図上の第2の移動軌跡とに基づいて予め算出された、前記第1の移動軌跡の第1の座標系を前記第2の移動軌跡の第2の座標系へ非線形マッピングする座標変換パラメータに基づいて、推定されたロボットの第1の地図上の自己位置を第2の地図上の自己位置に変換するように構成する。
(もっと読む)
自動追従式台車
【課題】追従すべき作業者を識別し、複数の作業者が同じフロアでそれぞれ台車を追従させて作業できる自動追従式台車を提供する。
【解決手段】台車1に取り付けられる受光器2R、2C、2Lと、作業者3に取り付けられて、その作業者3を特定するための所定の発光パターンで発光する発光器4と、上記受光器2R、2C、2Lで受光した発光パターンを識別することにより作業者3を識別し、その作業者3を追従するよう移動制御を行う制御手段8とを備えている。
これにより、台車1に取り付けられた受光器2R、2C、2Lは、作業者3に取り付けられた発光器4で発光された作業者3を特定する発光パターンを受光して作業者3を識別し、識別した作業者3を追従するよう移動制御を行う。
(もっと読む)
スポット誘導走行車
【課題】カーブ部分を的確に通過することのできるスポット誘導走行車を提供すること。
【解決手段】複数のマークのそれぞれを検出することのできる検出装置110と、検出結果を用いて求められる、第一マークの位置におけるスポット誘導走行車の状態を示す第一状態情報を取得する状態取得部122と、第一状態情報と目標状態情報とに基づいて、第一操舵条件を決定する操舵条件決定部124と、第一操舵条件に従って、スポット誘導走行車100の走行を制御する制御部120と、第二マークの位置におけるスポット誘導走行車100の状態を示す予測情報を算出する予測部126とを備え、状態取得部122は、予測情報と実測情報との差分を示す第二状態情報を取得し、操舵条件決定部124は、第二状態情報に示される差分に応じて第二操舵条件を決定し、制御部は、第一操舵条件に代えて第二操舵条件に従って、スポット誘導走行車100の走行を制御する。
(もっと読む)
自律走行搬送システム
【課題】どのような経路であってもその経路に沿って搬送することができ、且つ経路から外れた場合に迅速、且つ的確にもとの経路に戻ることができる自律走行搬送システムを提供する。
【解決手段】搬送経路に配置された複数のICタグと、走行駆動機構と、前記ICタグの情報を読み取るタグリーダと、これらの走行駆動機構とタグリーダの動作をコントロールする制御部とを備え位置を把握しながら搬送経路に沿って走行する搬送台車とにより構成され、制御部は、搬送経路に関するマップ情報を格納するメモリと、ICタグ情報とマップ情報に基づいてドライバをコントロールするCPUとを備え、CPUは、前記マップ情報を基に搬送台車をICタグの間で自律走行させる一方、複数のタグリーダからのICタグ情報により搬送台車の搬送経路からのずれを検出してドライバに走行修正信号を送付するようにした。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
搬送装置
【課題】搬送車に所定の積載物が設置されているか否か(所定の積載物の有無)を確実に特定可能であり、障害物検出手段による検出範囲を所定の積載物の有無に応じて正確に変更可能な搬送装置を提供する。
【解決手段】搬送車11と、バンパーセンサ12と、制御装置15と、を有する搬送装置10であって、搬送車11に所定の積載物(自動車のボデー1・台車3)が設置されているか否かを検出して、搬送車11に前記所定の積載物が設置されている場合には積載物信号を出力する積載物検出手段(センサ13・14)を有し、前記所定の積載物の寸法は、搬送車11の寸法よりも大きく構成され、制御装置15は、前記積載物検出手段から前記積載物信号を受信した場合に、バンパーセンサ12による検出範囲を前記所定の積載物の寸法に応じた広さに変更することを特徴とする。
(もっと読む)
自走車
【課題】指等の入力指示体の最低限の動きで操作情報を入力することができる自走車を提供すること。
【解決手段】電動車椅子1において、車椅子本体10に対する操作入力に赤外光を利用した光学式の操作入力装置100を用いているため、指Ob1の小さな動きで操作入力を行なうことができる。このため、操作レバーを手動操作できない者や、音声入力できない者であっても、車椅子本体10を操作することができる。また、電動車椅子1には、赤外光を利用した光学式の障害物検出装置200を設けたため、安全な走行を実現することができる。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
搬送車及びプログラム
【課題】誘導線に対する転舵車輪の内回り走行及び外回り走行に応じて転舵角度の制御量を変更する搬送車及びプログラムに関する。
【解決手段】台車1は、磁気テープ10の中央線L10に対するガイド偏差を検出するガイドセンサ4a、4bを前後方向に備える。台車1の前方に向かってガイドセンサ4a、4bの左側に前輪3a、後輪3bが前後に離間して備えられている。制御部5は、ガイド偏差にゲインを乗じて得られた制御量を用いて前輪3a、後輪3bの転舵角度を制御することで搬送車が磁気テープ10に沿って走行する。搬送車が直進時に磁気テープ10に沿って左旋回する場合、磁気テープ10に対して前輪3a及び後輪3bが内回り走行する。制御部5は、前輪3a及び後輪3bが内回り走行する場合、外回り走行時の制御量よりも大きな制御量に変更する。
(もっと読む)
電磁誘導式電動走行車
【課題】走行路に沿って敷設された誘導線から発生する磁界を検出して舵取り制御を行う電磁誘導式電動走行車が走行路から外れたときに、走行路への復帰を自動的に行わせる。
【解決手段】車体の誘導線からの位置ずれ量が、舵取り制御が可能な範囲を越えたときに脱線したとの判定を行う脱線判定手段31Eと、脱線が判定されたときに駆動輪3及び舵取り輪2に制動をかけて車体を停止させる脱線時制動制御手段31Fと、脱線判定時に舵が切られていた方向と同じ側に一杯に舵を切った状態で、停止させられた車体を舵取り制御が可能になる位置まで後退させて停止させるように舵取り装置4と電動駆動装置29と制動装置23とを制御する脱線復帰制御手段31Gとを設けた。
(もっと読む)
無人搬送車の走行制御装置
【課題】磁気マーカを検出するマーカセンサの検出精度を向上できる無人搬送車の走行制御装置を提供する。
【解決手段】無人搬送車の車体に対し、走行路面に敷設された誘導テープ12の位置を検出するホール素子よりなる検出素子25〜25を設ける。検出素子25の左右両側方に第1〜第4マーカセンサ31〜34を設け、各センサ31〜34により走行路面に敷設された磁気マーカ14B,14Cを検出する。検出素子25及び各マーカセンサ31〜34の上方に磁性体35を配設し、各センサ31〜34の検出感度を向上する。磁性体35の左端部が分岐誘導テープ13の上方に移動されると、該左端部が分岐誘導テープ13の磁束により磁化(N極化)され、磁性体35の右端部がS極化される。磁性体35の磁力により第3マーカセンサ33が作動されてON信号が出力されても、このON信号を無効とする判定を行う。
(もっと読む)
走行車
【課題】 先行車を検出する検出角度範囲を迅速に切り替えて、カーブ区間等での車間距離を短くすると共に、高速走行を容易にする。また分岐部でのブロッキング制御を不要にする。
【構成】 走行車に、水平な弧状の検出レンジを有し、検出レンジ内の物体までの距離と角度との検出信号を出力する距離センサを設ける。また走行経路のマップを設け、かつ前記マップ上の位置に基づいて、先行車を検出すべき検出角度範囲を設定し、検出角度範囲内での距離センサの検出信号から、先行車との干渉を回避するように走行車の速度制御を行う。
(もっと読む)
音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体
【課題】音声認識の精度を向上させる音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体を提供する。
【解決手段】音声を入力する音声入力手段と、入力された音声の到来方向を検出し、音源方向検出結果を出力する音源方向検出手段と、入力された音声に発話区間を検出し、発話区間に対し認識処理を行い、音声認識結果を出力する音声認識手段と、音声認識手段が音声検出中であるか否かを出力する音声検出状態取得手段と、音声検出中でない場合は音源方向検出手段から出力された音源方向検出結果を出力し、音声検出中である場合は音声検出中でなくなるまで音源方向検出結果の出力を抑制する出力判定手段と、出力判定手段から出力された音源方向検出結果、若しくは音声認識手段から出力された音声認識結果の少なくともいずれかに従って動作を行う動作手段と、を備えることを特徴とする。
(もっと読む)
1 - 20 / 54
[ Back to top ]