
Fターム[5H303JJ01]の内容
位置、方向の制御 (6,897) | 位置以外の検出変量、検出手段 (392) | 速度 (240)
Fターム[5H303JJ01]の下位に属するFターム
位置検出信号のデータ処理によるもの (95)
Fターム[5H303JJ01]に分類される特許
1 - 20 / 145
ギア加工機の制御装置
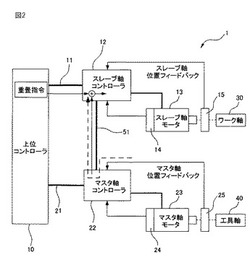
【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置

【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】停止精度の向上、停止までの所要時間の短縮化及び所要時間のばらつきの低減を、バランス良く実現可能な新しいモータ制御技術を提供する。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を実行すると共に(S180)、標準プロファイルに基づく第二制御処理によって駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pnを算出する(S150)。標準プロファイルは、駆動対象10の駆動開始時点から停止時点までの時間が一定で、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定された目標プロファイルである。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で(S170でYes)、第一制御処理に代えて第二制御処理を実行し(S200)、駆動対象を精度よく目標停止位置で停止させる。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
指令生成装置
【課題】基準軸の位置に同期させたセンサフィードバック制御を可能にするモータ駆動制御システムを実現するための指令生成装置を得る。
【解決手段】機械装置の状態をセンサ5で検出して機械装置を駆動するモータ4をセンサフィードバック制御するモータ制御装置3に対して、基準軸の位置とセンサフィードバック制御の指令値の対応関係を示す指令プロファイルに基づいて、基準軸の位置に対応したセンサフィードバック制御の指令値の詳細を演算して出力する。
(もっと読む)
軌跡制御装置
【課題】加減速の影響により送り速度が過渡的に変化するような場合でも軌跡誤差を抑制できる軌跡制御装置を得ること。
【解決手段】軌跡制御装置は、機械の可動部が複数の可動軸により駆動され、前記複数の可動軸を同時制御することにより前記可動部の軌跡を制御する軌跡制御装置であって、与えられた指令経路に対して補間・加減速を行う補間・加減速演算部と、前記補間・加減速された指令経路に応じて、前記複数の可動軸の位置指令を生成する軸分配部と、前記複数の可動軸の位置指令と前記補間・加減速された指令経路とに基づいて、軌跡誤差を補正するための補正ベクトルを演算する補正ベクトル演算部と、前記演算された補正ベクトルを用いて前記複数の可動軸の位置指令を補正する位置指令補正部と、前記複数の可動軸の位置が前記補正された複数の可動軸の位置指令に追従するように、前記複数の可動軸を同時制御するサーボ制御部とを備えている。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
位置決め制御装置
【課題】位置決めの完了判定や現在位置の取得の高速化が可能な位置決め制御装置を提供する。
【解決手段】所定の位置制御周期で制御対象の現在位置情報をサンプリングし、目標位置情報と現在位置情報との位置偏差に基づいて制御対象の位置決め用の制御量を出力する位置制御部と、この位置制御部から出力された制御量に基づいて制御対象を駆動する駆動部とを備え、位置制御部は、過去から現在に至る複数回のサンプリングによって得られた現在位置情報を一時記憶するバッファと、バッファに記憶された複数の現在位置情報から所定の統計値を算出する演算処理部とを備える。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】外乱の影響によって、撮像器の指向方向にずれが発生することを抑制する。
【解決手段】実施形態によれば、撮像部11にて撮像視野内の目標に関する画像情報を得て、この画像情報を画像処理部にて画像処理することで撮像部の指向方向と目標の方向との差異となる目標方向情報を得て、駆動部12、14にて目標方向情報及び当該駆動部の駆動に関するセンサ情報に基づいて撮像部11の視軸方向を目標の方向に指向させて追跡する目標追跡装置において、センサ情報に基づいて、駆動部自体に内在する外乱の量を算出する外乱量演算手段143と、この外乱量演算手段で得られた外乱の量に基づいて、当該外乱が印加された場合に発生する撮像部の指向方向のずれ量を算出するずれ量算出手段144と、画像処理部から出力される目標方向情報をずれ量で補正する補正手段とを備えた目標追跡装置を提供する。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
プローブユニット相対的平行度調整装置、プローブユニット相対的平行度調整方法、プローブユニット相対的平行度調整プログラム、プローブユニット及びパネル搬送部材
【課題】 帯状電極が短手方向に並設されているパネル部材に対し、各帯状電極と接触するプローブを設けたプローブユニットが相対的に平行であることの確認・調整を短時間で実行できる装置を提供する。
【解決手段】 本発明の装置は、パネル部材に対するプローブユニットの相対的平行度を調整する傾き調整機構と、プローブユニット及びパネル部材間の距離を検出する複数のセンサと、プローブ及び帯状電極が相対的に接近して接触する前後の各センサからの出力を取り込むセンサ出力取込手段と、取り込んだ各センサの出力に基づいて、プローブユニットの平行度調整において参照する情報を形成する調整参照情報形成手段とを備えたことを特徴とする。
(もっと読む)
フルクローズド位置制御装置
【課題】 数値制御機械のフルクローズド位置制御装置において、対象プラントの条件に関わらず、プラント変動に応じて、システムの安定性(振動抑制性を含む)と、高い指令追従性能及び負荷外乱抑制性能が両立するフルクローズド位置制御装置を提供する。
【解決手段】 フルクローズド位置制御装置は、位置指令値の時間微分である速度指令値と、位置指令値と対象プラントの負荷位置との位置偏差を増幅する位置偏差増幅器の出力と、を加算した結果から、対象プラントの負荷速度を減算して速度偏差を算出する加減算器3と、速度指令値と撓み速度補償値との加算値である速度補償値をモータ速度から減算する減算器2と、速度偏差と減算器の出力とを入力として、対象プラントへの制御入力を求めて出力する速度制御器1(Kr)と、を備える。
(もっと読む)
工作機械の送り駆動系の制御方法及び制御装置
【課題】象限突起の補正量を運転状況に応じて適正に定めるとともに、補正のタイミングや補正形状のズレを極小にし、象限突起の補償を十分に行う。
【解決手段】送り駆動系の制御方法は、サーボモータにより送り運動される移動体の位置検出信号と位置指令信号とが一致するように速度指令信号を生成し、サーボモータの速度検出信号と速度指令信号とが一致するように駆動力信号を生成し、この駆動力信号に基づいてサーボモータの駆動力を制御する。位置指令信号を先読みし、位置及び送り速度から送り駆動系に作用する摩擦力を推定する摩擦力推定工程21と、位置指令信号の入力から実際に移動体位置が駆動されるまでの制御系をモデル化し、このモデルの摩擦力と位置指令との関係から、上記摩擦力推定工程で推定した摩擦力に相当する補正指令を算出し、この補正指令を位置指令に加算して摩擦力の補償を行う摩擦力補償工程22とを備える。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
1 - 20 / 145
[ Back to top ]