
Fターム[5H501JJ17]の内容
Fターム[5H501JJ17]に分類される特許
1 - 20 / 498
モータ駆動回路、および、モータ駆動システム
モータ駆動制御装置及び集積回路装置
回転力発生装置
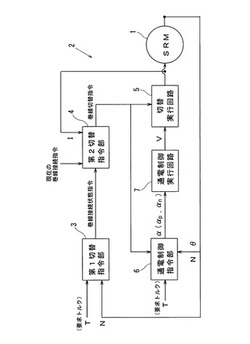
【課題】相巻線における巻線の接続状態を切り替えても、トルク波形の変動が生じない回転力発生装置を提供する。
【解決手段】トルクTと回転数Nを用いて相巻線の「直列接続→並列接続」または「並列接続→直列接続」の切替えを実施する際に、相巻線の通電状態が非通電のタイミングで切替えを実施するとともに、相巻線の電流波形を制御して切替え直前と直後のトルク波形を略同一波形に揃える。これにより、SRモータ1は、広い運転領域において高出力を得ることができるとともに、相巻線の通電中に巻線組の切替えが実施されることで生じるトルク変動を回避でき、さらに、巻線組の切替えが行われて巻線組のインダクタンスが変化することによるトルク波形の変動も回避することができる。
(もっと読む)
金属ストリップの破断検知システムおよび破断検知方法

【課題】張力実績値を取得することが難しく、また各種センサを設置することが難しい環境下にある製造ラインの処理セクションであっても、金属ストリップが破断した状態であることを検知することができる金属ストリップの破断検知システムおよび破断検知方法を提供する。
【解決手段】破断状態判定部27は、トルク電流実績値実績値Iから算出されたロールの回転速度変化率α´(mpm/s)と、ロールの回転速度実績値V(mpm)から算出された回転速度変化率α(mpm/s)との差の絶対値(回転速度変化率Δα(mpm/s))が、破断状態判定閾値記憶部26に記憶されている破断状態判定閾値Kを超えた場合に、製造ライン上の金属ストリップSが破断した状態であると判定する。
(もっと読む)
冷却ファン、制御方法及び電子機器
【課題】 冷却ファンなどの寿命部品における保全情報を利用する技術を提供する。
【解決手段】 寿命を予測するために必要な寿命情報を収集するセンサと、この前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファンと、前記信号線から前記寿命情報の成分を除くフィルタと、前記寿命情報に基づいて、冷却ファンの寿命を予測する状態監視手段とを備える電子機器。また、寿命を予測するために必要な寿命情報を収集するセンサと、前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファン。
(もっと読む)
電動機の駆動装置
【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
アクチュエータ制御装置、アクチュエータシステム、アクチュエータ制御方法及び制御プログラム
【課題】アクチュエータを構成する機械要素の支障を検出する。
【解決手段】制御装置10は、アクチュエータが正常に駆動するとみなされる場合の基準タイミングと、その基準タイミングにおいてモータ32に流れる電流値(基準電流値)とを対応付けた診断基準データを生成する。また、制御装置10は、支障診断時にアクチュエータが駆動する場合の検出タイミングと、その検出タイミングにおいてモータ32に流れる電流値(検出電流値)とを対応付けた診断対象データを生成する。更に、制御装置10は、同一タイミングである検出タイミングと基準タイミングとに対応づけられた検出電流値と基準電流値との差分の絶対値を算出し、その算出値が差分閾値より大きい場合には、検出タイミングにおけるスライダの位置を支障位置として算出し、機械要素の支障を通知する。
(もっと読む)
電動機の位置制御装置
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
モータ制御装置
【課題】モータ制御用のプログラムがオンボード形式で適切に書き込まれた記憶素子を実装したモータ制御装置を提供する。
【解決手段】本発明のモータ制御装置1によれば、モータ2を駆動するための制御用プログラム15が書き込まれるメモリ13が配置された回路基板10と、回路基板10に形成され、メモリ13に制御用プログラム15を書き込むために電気信号を出力するコンタクトプローブ34が接触するランド18と、コンタクトプローブ34から出力された電気信号をランド18からメモリ13に伝送する導通パターン19とを備え、ランド18は、スルーホール18aを有し、スルーホール18aにコンタクトプローブ34を嵌合させることによってコンタクトプローブ34と接触する。
(もっと読む)
モータの異常診断装置
【課題】簡単な構成でモータに発生したガタ等の異常を正しく診断することができるモータの異常診断装置を提供する。
【解決手段】モータ10に駆動信号を出力するモータドライバ20と、モータの回転速度を検出する回転速度検出センサ30と、モータドライバに指令信号を出力するコントローラ22とを備え、コントローラ22は、モータの回転を周期的に変化させる異常診断指令信号を出力し、異常診断指令信号によってモータドライバを介してモータの回転が周期的に変化したときの回転速度検出センサからの回転速度検出信号を時系列的に順次取り込み、取り込まれた回転速度検出信号に基づき、異常の診断を行う。
(もっと読む)
電気モータ制御装置
【課題】固定容量型のポンプを使用しつつ、レバーの操作量に応じた速度でアクチュエータを駆動する。
【解決手段】電気モータの回転速度を制御する電気モータ制御装置であって、ポンプの吐出圧が最高負荷圧よりも所定の設定圧だけ高くなるように、最高負荷圧に基づいて電気モータの暫定目標回転速度を算出し(S74)、ポンプの吐出圧に基づいて、電気モータの出力トルクがその吐出圧のときに出力可能な最大トルクとなる電気モータの回転速度を上限回転速度として算出し(S75)、暫定目標回転速度と上限回転速度とのうち、低いほうを電気モータの目標回転速度として算出し(S76)、電気モータの回転速度が目標回転速度となるように、電気モータの回転速度を制御する(S77)ことを特徴とする。
(もっと読む)
駆動制御装置と画像形成装置
【課題】 動作部を安定して動作させる場合に不必要に低速で動作してしまうことのないようにする。
【解決手段】 CPU61は、インク関連動作制御部73を制御してインク関連動作部58を駆動させ、NVRAM64の動作実施回数を加算し、センサ57からの信号に基いて正常動作終了を検出した場合、NVRAM64の正常動作終了回数を加算し、NVRAM64の動作実施回数が判定基準回数以上の場合、(動作OK回数/動作実施回数)の値を算出し、その値がNVRAM64の正常判定閾値以上の場合、加速度に調整加速度を加算して新たな加速度にする。また、(動作OK回数/動作実施回数)の値が異常判定閾値以下の場合、加速度から調整加速度を減算して新たな加速度にする。
(もっと読む)
制振制御装置
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
駆動装置
【課題】モータの制御性を高くすることや車両の挙動をより適正なものとする。
【解決手段】カットオフ周波数Fc以上の周波数成分を減衰させるローパスフィルタ処理を電流センサにより検出されたバッテリの充放電電流Ibに施して得られるフィルタ後電流FIbをモータの制御に用いるものにおいて、モータの回転数Nmが昇圧コンバータを含む回路の共振回転数領域(下限回転数N1〜上限回転数N2の領域)外のときには(S110)、所定周波数Fc1をカットオフ周波数Fcに設定する(S120)。一方、モータの回転数Nmが共振回転数領域内のときには(S110)、所定周波数Fc1より小さな所定周波数Fc2または所定周波数Fc3をカットオフ周波数Fcに設定する(S130〜S150)。
(もっと読む)
周期エラー検出方法および周期エラー検出回路
【課題】周期処理の処理時間超過を確実に検出することのできる周期エラー検出方法および周期エラー検出回路を提供する。
【解決手段】実施形態の周期エラー検出方法は、カウンタ11と、レジスタ12とを有するキャプチャタイマ1を備え、周辺回路110から出力される周期トリガをキャプチャトリガCTG1として取得した第1のカウント値cnt1、モジュール120の処理開始時にキャプチャトリガCTG2をかけて取得した第2のカウント値cnt2、モジュール120の処理終了時にキャプチャトリガCTG3をかけて取得した第3のカウント値cnt3を、それぞれレジスタ12に保存する。プロセッサ100は、モジュール120からの完了通知を受け取ると、レジスタ12からcnt1、cnt2、cnt3を読み出し、その値にもとづいてモジュール120の処理時間を算出し、所定周期と比較して周期処理エラーの発生の有無を判定する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
電子制御装置
【課題】駆動対象に対する外力の加わり方が異なる場合でも、噛み合わせクラッチの接続を確実に解除する。
【解決手段】電子制御装置100は、バックドアを開閉動作させるために、モータ駆動部6で電動モータ12を回転させ、電動モータ12の駆動力をバックドアに断続して伝達するために、クラッチ駆動部4で噛み合わせクラッチを接続または接続解除させ、電流検出部2で電動モータ12に流れる電流を検出する。モータ駆動部6で電動モータ12を停止させた後、電流検出部2で検出された、電動モータ12に流れた停止直前の電流値がしきい値以上である場合に、モータ駆動部6で電動モータ12を停止前の回転方向と逆方向に所定時間だけ回転させ、停止直前の電流値がしきい値未満である場合に、モータ駆動部6により電動モータ12を停止前の回転方向に所定時間だけ回転させ、かつ、クラッチ駆動部4で噛み合わせクラッチを接続解除させる。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法
【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
1 - 20 / 498
[ Back to top ]