
Fターム[5H501LL34]の内容
Fターム[5H501LL34]の下位に属するFターム
Fターム[5H501LL34]に分類される特許
61 - 80 / 217
駆動制御装置
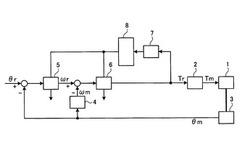
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
波動歯車装置の角度伝達誤差補償方法

【課題】波動歯車装置の角度伝達誤差であるモータ軸同期成分の補償を、波動歯車装置に取り付けられたモータを制御することにより行って、位置決め精度の向上と共に、位置決め応答中の動的なモータ軸同期成分が原因で発生する振動を抑制できるようにすること。
【解決手段】モータ軸位置に基づき負荷軸位置をセミクローズドループ制御により行う波動歯車装置を備えたアクチュエータ(PLANT)における角度伝達誤差補償方法において、モータ位置に同期して発生する相対回転同期成分θSyncを振動源に見立て、当該相対回転同期成分θSyncが負荷位置に与える影響を補償できるように算出した補償電流指令icompによりモータ電流指令irefを補正すると共に、相対回転同期成分の影響を補償するために算出したモータ位置補正信号θcompによりモータ位置指令rを補正する。
(もっと読む)
車両
【課題】回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決手段】モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。
(もっと読む)
信号処理装置、画像形成装置、および信号処理方法
【課題】ナイキスト周波数よりも低いサンプリング周期を適用し、FFT変換して取得したピーク値の周波数を適切に復元できるようにした。
【解決手段】異なる2つのサンプリング周期で周波数解析に必要なデータをサンプリングし(処理201〜判断206)、ピーク値が不一致となる周波数があるかどうかを調べ(判断208)、ある場合には、(fa−fb)=(Pa−Pb)の関係を満たすピーク値を探し(処理209)、そのようなピーク値を見つけると(判断210の結果がYES)、Fr=(fa−Pa)=(fb−Pb)の関係式を適用して、ピーク値の周波数Frを補完(復元)する(処理211)。
(もっと読む)
直線運動と回転運動のためのモータ
要約すると、本発明は単一モータを用いて回転運動と並進運動を可能にする装置、方法及びコンピュータプログラムに関する。直線運動と回転運動のための電気モータ102は、複数のコイル又はコイルセットを含む多相コイル配列を持つステータ104と、その回転軸の方向に沿って運動可能で、少なくとも1つの永久磁石をそれぞれ有する複数の極を持つロータ106とを有することができる。制御ユニット108は少なくとも複数のコイル又はコイルセット、ロータの回転角度、及びロータの軸方向位置に応じたパラメータに基づいて電流を決定し、決定された電流をコイル又はコイルセットに供給し得る。 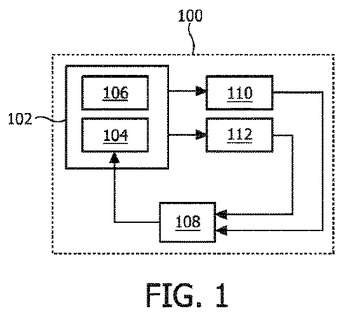 (もっと読む)
(もっと読む)
モータ制御装置の制振方法および制振方法を備えたモータ制御装置
【課題】 振動に減衰がある場合も機械動作時の振動を指令の形状により完全に抑制できるようにする。
【解決手段】 システム全体の固有振動角周波数ωn、減衰率ζとしたとき、基本波形を作成し、基本波形をtd=π/(ωn・sqrt(1−ζ2))だけずらし、且つ、大きさを基本波形のα=exp(−ζ・ωn・td)倍した波形を作成し、それらを足し合わせた波形を作成し、移動距離に応じてゲインを乗じた波形を速度指令とするという手順で処理する。
(もっと読む)
モータ制御装置とその位置制御方法
【課題】
位置制御周期が変動しても原点信号と位置関係に悪影響を及ぼすことのないモータ制御装置と位置制御方法を提供する。
【解決手段】
位置制御部は、位置制御周期をモータ位置生成時刻増分値で除し、予め設定された第1位置制御ゲインを乗じて第2位置制御ゲインを生成する第2位置制御ゲイン生成部(21)と、位置指令増分値と第1位置制御ゲインを乗じた値からモータ速度増分値と第2位置制御ゲインを乗じた値を減算し、さらに前回の速度指令を加算して新たな速度指令とする速度指令生成部(22)と、を備えた。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
位置決め装置
【課題】ユーザに繁雑な作業を強いることなく高い位置決め精度を実現することができ、モータの加速度を変えても位置決め精度の悪化を招くことがない位置決め装置を提供する。
【解決手段】位置決め装置1は、平面モータ10に駆動されてXY面内で移動可能なステージ20と、平面モータ10によるステージ20の駆動を制御するモータ制御装置30とを備えており、モータ制御装置30は、ステージ20が移動している状態における平面モータ10の電流推力特性に合わせた駆動電流C1〜C3を平面モータ10に供給する。
(もっと読む)
モータ制御装置とモータ制御方法
【課題】 制御対象の振動を抑制しつつモータを滑らかに動作させることのできるモータ制御装置を提供する。
【解決手段】 移動時間tbと指令次数に関する変数kとaを移動距離に依存する変数とした速度時間関数に基づいて指令払い出し周期毎の指令を演算する指令演算部と,sをラプラス演算子とした時に,ωs,ωc,ζを変数とする2次の伝達関数GF(s)の特性を有するフィルタ演算をする指令フィルタ演算部と,移動時間tbと指令次数に関する変数kに基づいて指令フィルタの変数であるωsを演算で求めるフィルタ定数演算部を備える。
(もっと読む)
モータ駆動式システムのための制御技法
【課題】本発明の実施形態は、バックチャネルの特性を測定し、機械システムの振動特性を導出する検出システムを有する、モータ駆動式機械システムを提供する。
【解決手段】検出システムの使用は、機械システムの共振周波数、および、開始用機械的停止位置から機械システムを移動させるのに必要とされる閾ドライブDTHを計算することを含んでもよい。システム製造業者は、製造業者の機械システムの共振周波数およびDTHを正確に知らないことが多い。したがって、製造業者の予想する値に依存するのではなく、特定の機械システムの共振周波数およびDTHを計算することは、機械システム使用時の精度を改善する。バックチャネル計算を使用し、対応する予めプログラムされた値を置き換えることも改善することもできる。
(もっと読む)
モータ駆動式システムのための制御技法
【課題】本発明の実施形態は、バックチャネルの特性を測定し、機械システムの振動特性を導出する検出システムを有する、モータ駆動式機械システムを提供する。
【解決手段】検出システムの使用は、機械システムの共振周波数、および、開始用機械的停止位置から機械システムを移動させるのに必要とされる閾ドライブDTHを計算することを含んでもよい。システム製造業者は、製造業者の機械システムの共振周波数およびDTHを正確に知らないことが多い。したがって、製造業者の予想する値に依存するのではなく、特定の機械システムの共振周波数およびDTHを計算することは、機械システム使用時の精度を改善する。バックチャネル計算を使用し、対応する予めプログラムされた値を置き換えることも改善することもできる。
(もっと読む)
車両用電力変換装置および電動車両
【課題】駆動モード時に低温時の耐電圧低下に制限されることなくインバータ回路を駆動することができる、信頼性の高い車両用電力変換装置の提供。
【解決手段】車両用電力変換装置は、上アーム用半導体スイッチング素子および下アーム用半導体スイッチング素子を相毎に備えて回転電機を駆動するインバータ回路144と、上下アーム間に第1の電圧Vbを印加してトルク指令に基づくスイッチング動作を行わせる駆動モード、および、上下アーム間に第1の電圧Vbよりも低い第2の電圧Vcを印加してスイッチング動作を行わせる暖機モードの、いずれか一方を選択してインバータ回路144を制御する制御回路172を備える。そして、車両起動信号が入力されると、暖機モードでインバータ回路144を制御し、IGBT328,330を暖機する。その結果、駆動モード時における耐圧オーバーが防止され、信頼性の向上を図ることができる。
(もっと読む)
モータ駆動制御装置
【課題】制御入力の飽和による制御性能劣化や制御系の不安定化を確実に防止できるモータ駆動制御装置を得ること。
【解決手段】参照位置偏差算出部4aは制御入力計算部7の出力と入力との関係に基づいて、制御入力hが参照制御入力bに一致するための参照位置偏差dを算出する。位置補正量算出部5aは参照位置偏差dの絶対値が位置偏差eの絶対値よりも小さい場合、位置補正量fを位置偏差eが前記参照位置偏差dと一致するように算出して出力し、参照位置偏差dの絶対値が位置偏差eの絶対値よりも大きい場合は、前記位置補正量fをゼロにして出力する。指令値整形部6aは位置偏差eから位置補正量fを引き算して生成した修正位置偏差gを制御入力計算部7の入力信号とする。
(もっと読む)
機器におけるモータの制御方法
【課題】 モータのコギングによる速度変動の影響を抑制する
【解決手段】 第1駆動信号をモータへ出力して機構の移動を行う予備駆動工程と、第1駆動信号に加えモータのコギング周期に対応した第2駆動信号をモータへ出力して機構の移動を行う予備駆動工程とを行い、予備駆動工程における機構の速度に基づいて、第2駆動信号の出力する波形と出力タイミングを含むパラメータを決定し、機構を移動させて所定の処理を行う実駆動工程において、第1駆動信号をモータへ出力するとともに、決定したパラメータに従って第2駆動信号をモータへ出力する。
(もっと読む)
モータ制御方法、および、モータ駆動装置の電源装置
【課題】高速応答性を備えかつ加速性を向上させるモータ制御方法を提供する。
【解決手段】モータを駆動するモータ駆動手段に電力を供給する電源を用意し、モータの加速または減速の開始に基づき、電源からの供給電力の電圧を上げ(S1、S2)、モータの加速または減速の終了に基づき、供給電力の電圧を下げる(S3、S4)。
(もっと読む)
位置決め制御装置
【課題】モータに連結されたロータリーエンコーダ等の角度検出器の回転軸と中心軸との間に軸ずれがある場合でも、多くのメモリ容量を要することなく、簡単な演算により補正量を演算して回転角度を正確に検出し、高精度な位置決め制御を可能にする。
【解決手段】モータ回転軸等の回転体の回転角度を検出するロータリーエンコーダ6と、エンコーダ6による角度検出値を、その軸ずれによる検出誤差に相当する補正量を用いて補正する位置補正器7と、位置補正器7から出力される補正後の角度検出値と位置指令とを比較して位置偏差を求める位置比較器1と、前記位置偏差をゼロとするように前記回転体の駆動源としてのモータ4を制御するフィードバック制御器2,モータ駆動装置3を備える。
(もっと読む)
サーボ制御装置とサーボ制御方法
【課題】 実際の慣性モーメントが、慣性モーメント設定値からずれた場合でも、位置決め時間が延びることなく、振動も発生しないで位置決めすることができるサーボ制御装置とサーボ制御方法を提供する。
【解決手段】 規範速度と推定速度の偏差を基に、補正慣性モーメントを算出する慣性モーメント補正部(50)と、補正慣性モーメントを慣性モーメント設定値に加算して制御用慣性モーメントを算出する加算部(27)と、制御用慣性モーメントを使用して速度制御演算をする速度制御部(4)、トルクフィードフォワード演算をするトルクフィードフォワード部(30)、オブザーバ演算をするオブザーバ(9)を備える。
(もっと読む)
電動機制御装置と予測制御方法
【課題】機械にあわせてフィードフォワード量を調整して指令に追従させ、制御演算を簡易にして、加減速時のオーバシュートを減らし、一定速度時の追従性を高めた電動機制御装置と予測制御方法を提供する。
【解決手段】位置指令をサンプリング時間毎に保存する位置指令差分バッファ部(21)と、位置指令差分バッファ部の位置指令と電動機位置の位置偏差に基づいて速度指令を生成する予測演算部(22)とを備え、位置指令差分バッファ部は、速度フィードフォワードのみ使用する場合は2段し、トルクフィードフォワードを使用する場合は4段とした。
(もっと読む)
電動機制御装置及びその象限突起補償調整方法
【課題】1軸毎に調整できて、多軸の軌跡情報を解析する必要がなく、多軸用のサーボコントローラが不要で簡単に象限突起補償量を調整できる電動機制御装置及びその象限突起補償調整方法を提供する。
【解決手段】位置制御部11と、速度制御部12と、トルク指令に基づいて電動機を駆動する電動機駆動部と、前記電動機位置の時間差分により前記電動機速度を生成する速度生成部18と、を備えた電動機制御装置1において、1軸分の円弧指令の指令反転前後部分の位置指令を出力する円弧指令作成部15と、位置指令の方向反転後、移動量や時間に応じてトルク指令を補償する突起補償部16と、補償トルク指令を増減して速度制御積分制御部の出力を、最小値或いは所定値以下に小さくなるように調整する突起補償調整部17と、を備える。
(もっと読む)
61 - 80 / 217
[ Back to top ]