
Fターム[5H505DD06]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | 同期電動機 (2,591)
Fターム[5H505DD06]の下位に属するFターム
Fターム[5H505DD06]に分類される特許
81 - 100 / 1,078
モータの駆動装置
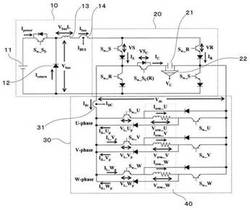
【課題】電流型インバータでインダクタンス負荷であるモータに方形波電流を通流し、SRモータを当該インバータで駆動することでSRモータの高効率化を図ることを課題とする。
【解決手段】電流源を実現する電圧チョッパ回路10と、誘起電圧を吸収するコンデンサとスイッチとからなるクランプ回路を備えた単相ブリッジ電流型インバータ20とを備え、前記クランプ回路のコンデンサとスイッチに並列に、モータの各相の駆動回路40を接続する。
(もっと読む)
同期モータの磁極位置を検出する検出装置およびこれを備える制御装置

【課題】d相電流指令およびq相電流指令に基づいて回転が制御される磁極位置センサを有しない同期モータに対して、磁極補正値を高精度かつ短時間に検出することができる検出装置およびこれを備える制御装置を実現する。
【解決手段】d相電流指令およびq相電流指令に基づいて制御される同期モータ2の磁極位置を検出する検出装置1は、同期モータ2の電源投入時における磁極初期位置の検出後に、所定のd相電流指令を与えて同期モータ2を正転および逆転させたときにそれぞれ生成される同期モータ2を回転させるための正転時d相電圧指令と逆転時d相電圧指令との差に基づいて磁極補正値を生成する生成手段11と、磁極補正値と同期モータ2のセンサの基準位置であるセンサ基準位置とに基づいて、磁極初期位置を補正する補正手段12と、を備え、制御装置100は、この検出装置1を備え、補正後の磁極初期位置に基づいて同期モータ2の回転を制御する。
(もっと読む)
モータ駆動装置
【課題】ブレーカが落ちるのを防ぐ。
【解決手段】コンバータ32は、整流回路33と小容量のリアクタ34とを有し、3相の商用電源51から出力される交流電圧Vacを直流電圧Vdcに変換する。インバータ37は、駆動電圧SU,SV,SWをモータM12に出力する。電流演算部39aは、直流電圧Vdcのリップル成分に基づいて各相の入力電流Ir,Is,Itを求める。特に、電流演算部39aは、交流電圧Vacの周波数に応じて選択した電流補正値に基づいて入力電流Ir,Is,Itを補正するか、または交流電圧Vacの周波数に関係なく、複数の規定周波数50Hz,60Hzのうち一番高い規定周波数60Hzに応じた所定補正値を電流補正値として入力電流Ir,Is,Itを補正する。モータ制御部39bは、補正後の入力電流Ir、Is,Itの少なくとも1つが所定値以上の場合に、インバータ37の出力を抑制する垂下制御を行う。
(もっと読む)
モータの制御装置
【課題】指令回転数と実回転数との差を低減できるモータの制御装置を得る。
【解決手段】モータの制御装置は、指令回転数で動作するようにモータを制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記駆動部により前記モータを駆動する際にモータ巻線に流す相電流を検出する検出部と、前記検出部により検出された相電流に応じた値の振動成分を抽出し、前記振動成分を積分した後、前記積分された値から低周波成分をオフセットとして除去することにより、前記指令回転数に応じた電気位相を補正する補正値を演算する演算部と、前記演算部により演算された補正値を用いて補正された電気位相を用いて、前記駆動部の制御信号を生成する制御部とを備え、前記駆動部は、前記制御部により生成された制御信号に従って、前記モータを駆動する。
(もっと読む)
電動機の脈動抑制装置および電動機の脈動抑制方法
【課題】システム同定モデル誤差を推定することができる電動機の脈動抑制装置を提供する。
【解決手段】インバータのベクトル制御により駆動される電動機(実プラントPn)の軸トルクTnに、トルクリプル補償電流指令値から軸トルク検出値までの周波数伝達関数の逆関数を乗算して外乱トルクを推定する周期外乱オブザーバPDOと、トルクリプル抑制制御開始直前の初期状態時の軸トルクTnとトルクリプル抑制制御開始後に十分トルクリプルが打ち消された最終状態時に、前記PDOにより推定された外乱推定値dI^nを外乱とみなしシステム同定モデルP^nから推定した軸トルク推定値T^nとを比較してシステム同定モデル誤差ΔPnを求める誤差推定器100と、前記誤差ΔPnを格納するメモリー110とを備え、メモリー110内の誤差ΔPnによってPDOのシステム同定モデルP^nを補正する。
(もっと読む)
交流回転機の制御装置
【課題】速度制御系の機械的応答で制約されていたトルクの応答性を改善できる交流回転機の制御装置を提供する。
【解決手段】交流回転機2へ交流電圧を出力する電力変換手段3と、交流回転機2に流れる電流を検出する電流検出手段4と、検出電流を回転二軸座標上の電流へ変換する電流演算手段5と、回転二軸座標上の電流に基づいて交流回転機2が出力する出力トルクを演算するトルク演算手段8と、トルク指令と出力トルクとの偏差に基づいて周波数指令を演算する周波数指令演算手段9と、周波数指令を補正する周波数補償量をトルク指令に基づいて演算する補償器10と、補正後の周波数指令に基づいて回転二軸座標上に設定した制御座標軸の位相を演算する位相演算手段6と、補正後の周波数指令と制御座標軸の位相とに基づいて電力変換手段に出力する電圧指令を演算する電圧指令演算手段7を備える。
(もっと読む)
交流モータの制御方法および制御装置
【課題】交流モータの動作状況に応じて電流のオフセット量を正確に検出でき、動作指令値の変更時や回転数が変化する途中の過渡状態でも誤ることがなく、高精度な制御を行える交流モータの制御方法および制御装置を提供する。
【解決手段】電流センサと位置センサとを備える交流モータの制御方法であって、電気角の1周期を検出する周期検出ステップ(S2およびS5)と、1周期にわたり電流の瞬時値を検出する電流検出ステップ(S1)と、電流の瞬時値を加算してオフセット検出値とする電流加算ステップ(S4)と、1周期の間に交流モータの動作状況が変化したか否かを判定する判定ステップ(S7)と、交流モータの動作状況が安定しているときにオフセット検出値に基づいてオフセット量を更新する更新ステップ(S9)と、動作状況が変化したときにオフセット検出値を廃棄する廃棄ステップ(S8)と、を有する。
(もっと読む)
電流検出装置
【課題】回路に流れる電流をより適正に検出できるようにする。
【解決手段】電流センサから出力されるべき電圧としての想定出力電圧Vw*に対する電流センサからの実出力電圧Vwのズレ量としての検出ずれΔVwとセンサ温度Twとに基づいてW相検出ずれマップのヒストグラムを更新し(S120)、更新したヒストグラムでの最大頻度検出ずれに基づいて補正値αwを設定し(S130)、設定した補正値αwを実出力電圧Vwに加えて求めた補正後出力電圧Vwmoを電流値に変換することによってW相の相電流Iwを算出する(S140,S150)。
(もっと読む)
交流電動機の制御装置
【課題】変換器のサイリスタが失弧しても、トルク脈動を発生させることなく装置を停止させることが可能な交流電動機の制御装置を提供する。
【解決手段】第1の変換器1と、第2の変換器2と、位置検出手段4と、速度検出手段5と、電流検出手段6と、速度検出手段5の速度帰還が速度指令となるように制御して電流指令を出力する速度制御器72と、電流検出手段6の電流帰還が電流指令となるように第1の変換器1の制御角指令αを出力する電流制御器73と、位置検出手段4の検出位相に応じて第2の変換器2の位相を制御する位相制御器79と、失弧検出手段9とで構成する。失弧検出手段9は、αが第1の所定値以下となり、且つ、電流指令から電流帰還を減算した偏差に第1の定数を乗じて遅延手段によって遅延させた信号から、電流指令に第2の定数を乗じた値を減算した値が第2の所定値以上となったとき、失弧発生とみなす。
(もっと読む)
回転電機のインバータ装置、及び回転電機の駆動方法
【課題】制御を複雑化するのを抑えつつ、スイッチング損失をより低減できる回転電機のインバータ装置を提供する。
【解決手段】所定の電気角ごとに、回転電機の各相の電流位相に応じて、相ごとに用意されたスイッチング素子の駆動に用いるキャリア信号のキャリア周波数を相ごとに決定する。相ごとのスイッチング素子は、相ごとに決定したキャリア周波数のキャリア信号、及び設定された指令電圧値を用いて生成した駆動信号により駆動する。
(もっと読む)
電動車両
【課題】走行用の駆動力の符号が変化するときに生じ得るトルクショックを抑制する。
【解決手段】駆動軸に出力すべき要求トルクの符号が変化するときに要求トルクを緩変化させる緩変化処理が実行されているときに値1となる緩変化処理フラグF0の値を調べ(S110)、フラグF0が値1のときには、昇圧コンバータのトランジスタをスイッチングするキャリア周波数fcとして通常用いる周波数fc1より高い周波数fc2を設定する(S130)。そして、この周波数fc2が設定されたキャリア周波数fcで昇圧コンバータのトランジスタのスイッチングを行なう。これにより、昇圧コンバータより昇圧側の電圧を安定させ、昇圧側の電力で駆動するモータの制御性を高くして、緩変化処理を高い精度で行なうことができるようにする。この結果、要求トルクの符号が変化するときに生じ得るギヤのガタによるトルクショックを抑制することができる。
(もっと読む)
モータインバータの制御方法、及び制御装置
【課題】モータインバータの電圧飽和を抑えつつ、d軸電流指令値、q軸電流指令値を用いてそのモータインバータを制御するための技術を提供する。
【解決手段】飽和率判定部210は、取得した電圧飽和率が所定値を越えているか否か判定する。電力誤差PI制御部220は、d軸電流指令値、q軸電流指令値を用いて指令電力値を、実際のd軸電流値、q軸電流値を用いて実電力値をそれぞれ計算し、計算した指令電力値及び実電力値を用いて、d軸電流指令値の補正に用いる補正量を計算する。Id補正部230は、計算された補正量を用いて補正d軸電流指令値を計算する。Iq補正部240は、補正d軸電流指令値を用いることにより電流許容量以上の電流が供給される場合に、q軸電流指令値を補正する。そのようにして、モータインバータにおける電圧飽和を抑える。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI制御量を演算するためのPI制御手段50,51と、モータの非干渉化制御のための非干渉化制御量を所定のタイミングで演算するための非干渉化制御量演算手段52と、PI制御手段50,51により演算されたPI制御量と非干渉化制御量演算手段52により演算された非干渉化制御量とから補正後の非干渉化制御量を決定する補正演算手段53,54と、PI制御手段50,51によって演算されたPI制御量と補正演算手段53,54によって補正された補正後の非干渉化制御量とを加算する加算手段55,56と、を備え、加算手段55,56は、所定の条件をみたす場合は、非干渉化制御量演算手段52によって演算された前回値の非干渉化制御量を補正後の非干渉化制御量として加算する。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
電力変換装置
【課題】トルク制御動作において、モータ電流の上昇を確実に検出できる電力変換装置を提案する。
【解決手段】交流電源(6)側からの電力を複数のスイッチング素子(Sr,Ss,St,Su,Sv,Sw,Sx,Sy,Sz)のスイッチング動作によって所定の周波数の交流電力に変換し、該交流電力をモータ(5)に出力する変換部(20)を設ける。モータ(5)の出力トルクが、交流電源(6)の出力電圧の周波数の整数倍の脈動成分である電源脈動成分を含み、且つモータ(5)の負荷トルク変動に応じて変動するようにトルク制御動作を行うとともに、電源脈動成分のピークと負荷トルク変動成分のピークとのタイミングが一致もしくは略一致したときのピーク電流値を求め、該ピーク電流値が所定の上限値を超えないように、出力トルクの変動幅を低減させる制御部(40)を設ける。
(もっと読む)
同期電動機駆動システム
【課題】ダイオードを挿入した回転子コイルを備えた同期電動機の低速センサレス制御において、複雑な処理を行う必要無く、回転角度の推定と磁極判別を同時に行うことが可能、言い換えれば推定範囲が−90°≦Δθ≦+90°ではなく、−180°≦Δθ≦+180°であるようなセンサレス制御方式による同期電動機駆動システムを提供する。
【解決手段】同期電動機7と、同期電動機7を制御する制御装置1とを備え、同期電動機は、固定子コイルを有する固定子4と、ダイオードが挿入された回転子コイル5を持つ回転子3とを有し、制御装置1は、固定子4に高周波磁束を発生させるための高周波磁束指令を生成する高周波磁束発生制御部11と、高周波磁束指令に応じて固定子コイルに発生した高周波電圧と高周波電流との少なくとも一方に基づいて、ダイオードに流れる電流の有無に応じた指標を算出するとともに、算出した指標に基づいて同期電動機7の回転角度を推定する回転角度推定部14とを有する。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧へのPWMの指令Duty値を制限するDuty指令制限値を算出するモータ電圧指令制限値算出手段13と、Duty指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
インバータの制御方法
【課題】スイッチングパターンが採用される期間が短いときに、キャリアの周期を長くすることなく当該期間を拡大できるインバータの制御方法を提供する。
【解決手段】3相の指令値Vu*,Vv*,Vw*のうち例えば一対の指令値Vv*,Vw*と、第1キャリアCとの比較によって決まるスイッチングパターンが採用される期間t61’が所定値以下であることが当該期間よりも前に推定されたときに、一対の指令値の一方、例えば指令値Vw*と比較される第2キャリアCwを生成する。第1キャリアCが増大する若しくは低減する方向において所定の変化率で一対の指令値の一方と交差する第1時点tc’に対して、第1キャリアCが当該方向で一対の指令値の他方、例えば指令値Vv*と交差する第2時点tbとは反対側の第3時点tcにおいて、第2キャリアCwが当該方向かつ当該変化率とは異なる変化率で一対の指令値の一方と交差する。
(もっと読む)
モータ制御装置
【課題】負荷トルクの変動が大きい場合でも低振動かつ低騒音で同期モータを駆動するとともに、回生エネルギーによる直流電圧の上昇を抑制することが可能な高力率のモータ制御装置を提供する。
【解決手段】モータ制御装置10において、基準値算出部29は、モータ電圧と同期モータ2のステータを流れるモータ電流との位相差に基づいて、モータ電圧の振幅に対応する第1の基準値を算出する。補正部24は、直流配線HL,LL間の線間電圧と予め定める上限値とを比較し、線間電圧が上限値以下の場合には負荷トルクの大きさに応じた補正値を第1の基準値に加算した値である第2の基準値を出力し、線間電圧が上限値を超える場合には、縮小された上記補正値を第1の基準値に加算した値である第3の基準値を出力する。制御信号生成部25は、補正部から出力された第2または第3の基準値に基づいてインバータ装置12を制御する制御信号を生成する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
81 - 100 / 1,078
[ Back to top ]