
Fターム[5H540AA06]の内容
Fターム[5H540AA06]に分類される特許
1 - 20 / 55
リニアモータ制御装置、及び制御方法
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
(もっと読む)
位置検出装置

【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
モータの過負荷保護装置
【課題】 特定位置、位相で過負荷が発生するような場合でも、温度検出手段を多数設けることなく過負荷検出が行え、かつ過負荷保護設定値の余裕を少なくできて、モータ性能を十分に利用できるモータの過負荷保護装置を提供する。
【解決手段】 電源スイッチ6をオフとしたときの絶対時刻による稼働停止時刻とこの時のベース部温度とを稼働停止時温度記憶手段13に記憶しておく。再稼働開始時温度算出手段13により、稼働停止時の間の冷却温度を計算して、再稼働開始時のベース部温度を算出する。熱発生源現在温度算出手段15により、再稼働開始時のベース部温度を用いて、各極コイル2aのモータ電流で発熱する各熱発生源の現在温度を算出する。過負荷判定手段16は、各熱発生源の現在温度を、各熱発生源毎に定められた過負荷保護設定値に達すると過負荷であると判定する。
(もっと読む)
振動溶接システム
【課題】システム信頼性に優れた振動溶接システムを提供する。
【解決手段】第1加工物支持部に結合され、第1加工物支持部の往復移動を行うための1対の電磁石と、電磁石に結合され、第1加工物支持部の往復移動を行うために、電磁石を互いに位相ずれで連続的に付勢および消勢する電気駆動システムとを有する。この駆動システムは、DC電流源と、電源を電磁石の各々に制御可能に結合し、電源を電磁石の各々から制御可能に切断する多数の制御可能電子スイッチング・デバイスと、電磁石に結合され、電磁石に供給される電流を表す信号を生成する電流センサと、電子スイッチング・デバイスに結合され、電流センサが生成した信号を受け取り、電磁石の付勢および消勢を制御して第1加工物支持部の往復移動を行うために、スイッチング・デバイスをオンおよびオフにする制御回路とを含む。
(もっと読む)
リニアエンコーダ
【課題】 電源投入時の立ち上がり時間を短縮させることが可能なリニアエンコーダを提供すること。
【解決手段】 リニアスケールには、位置情報としてインクリメント位置を示す複数の情報を所定ピッチで記録したインクリメント指標部と、インクリメント位置とは別の基準点位置を示す複数の情報を所定ピッチで記録した基準点位置指標部と、インクリメント位置及び基準点位置とは別の位置情報を持つアブソ信号を記録したアブソ指標部とが設けられ、隣接する任意の基準点位置間に含まれるアブソ信号の組み合わせが他の基準点位置間に含まれるアブソ信号の組み合わせの何れとも異なるように設定され、信号処理部は上記検出ヘッドの検出素子からの検出信号に基づいてアブソ信号の組み合わせを読み取り、予め記憶していたテーブルと比較して可動部のリニアスケール上の絶対位置を求めるように構成されているもの。
(もっと読む)
ステージ装置、及びステージ装置の制御方法、それを用いた露光装置及びデバイスの製造方法
【課題】コイルに流れる電流の遅れに起因して生じる、駆動すべき方向とは異なる方向への力を低減させる。
【解決手段】コイル4、及び複数の永久磁石を有するリニアモータと、コイル4に電流を供給する電流ドライバ9と、該電流ドライバ9への指令を生成する制御手段7とを備えたステージ装置であって、制御手段7は、コイル4と永久磁石との相対位置に基づいて算出した電気角を用いた正弦波を、リニアモータへの推力指令値に乗ずるコミュテーション処理により指令を生成し、更に、指令に対して、推力指令値に比例した振幅を持ち、かつ、正弦波と90度に位相がずれた正弦波の成分を含ませる。
(もっと読む)
リニアモータ用ブレーキ回路
【課題】 ブレーキ電流を外部から段階的に制御することが可能なリニアモータ用ブレーキ回路を提供する。
【解決手段】 リニアモータ150a、150bの負荷1に並列に接続された全波整流回路20と、整流回路20に直列に接続された、負荷1から出力される電流を制限する複数の電流制限抵抗R、R0、R1、R2と、各電流制限抵抗に直列に接続されたスイッチ素子M、M0、M1、M2と、前記スイッチ素子を独立してオンオフさせるインバータN、N0、N1、N2を有する。これらの電流制限抵抗は直列または並列に接続することができる。スイッチ素子としてnチャンネル型パワーMOSFETを使用することが好ましい。
(もっと読む)
リニアモータ用ブレーキ回路
【課題】 スイッチング動作時の消費電力を少なくしかつリニアモータの制動力を外部から制御することが可能なリニアモータ用ブレーキ回路を提供する。
【解決手段】 リニアモータの負荷に並列に接続された3相全波整流回路20と、この整流回路から出力されるブレーキ電流を制限する電流制限抵抗3(R11〜R14)と、電流制限抵抗R11、R13に接続された第1のトランジスタM0、M2とこれらのトランジスタに制御信号を出力する制御信号発生回路6a、6bを有する定電流回路4a、4bと、各定電流回路に流れる電流を2段階に調整する第2のトランジスタM11、M14を有するスイッチ回路5a、5bと、これらのトランジスタをオンオフさせるベース駆動回路7を有する。
(もっと読む)
位置決め装置及び工作機械装置
【課題】電源投入時に現在座標を許容誤差範囲の精度で検出し、所定位置への復帰動作をすることなく電源投入時の位置から動作を開始できる位置決め装置を提供する。
【解決手段】固定部12に対する可動部8の相対位置を検出するためのインクリメンタルエンコーダ23とアブソリュートエンコーダ21とを備え、制御装置19は、インクリメンタルエンコーダ23及びアブソリュートエンコーダ21の信号データの対応データを記憶した記憶手段と、電源投入時に読み取られた前記アブソリュートエンコーダ21の信号データから可動部8の初期座標を求める初期座標読取手段25と、電源投入時以後に読み取られたインクリメンタルエンコーダ23の信号データを基に可動部8の現在座標を求める現在座標読取手段25と、対応データによりインクリメンタルエンコーダ23の信号データに変換する信号変換手段と、を備えている。
(もっと読む)
平面パルスモータ、露光装置およびデバイス製造方法
【課題】平面パルスモータにおける可動子の回転制御に有用な技術を提供する。
【解決手段】平面パルスモータは、可動子4および固定子12を有する。可動子4は、磁性体を含んで構成され、固定子12に対向する面に複数の凸部を有する。固定子12は、可動子4を駆動するための複数の磁気発生ユニット6a、6bを有する。平面パルスモータの制御部は、複数の磁気発生ユニット6a、6bのうち、可動子12の駆動方向に沿った可動子4の中心線Cを跨がず、かつ、可動子4が存在する領域からはみ出していない磁気発生ユニットから選択される磁気発生ユニットを動作させることによって可動子4の回転を制御する。
(もっと読む)
リニアモータ、該リニアモータを備えた部品実装装置、前記リニアモータを備えた部品検査装置およびリニアモータの駆動制御方法
【課題】可動子の駆動を制御するための、電流の電気角の初期値を与える位置を、従来よりも簡単に定める。
【解決手段】本発明のリニアモータの駆動制御方法は、固定子25と、固定子25に沿って直線的に往復移動する可動子24と、可動子24または固定子25の一方に備えられる電磁石emと、他方に備えられる永久磁石maと、可動子24の移動量を検出する手段とを有し、電磁石emに供給する電流を制御することで、可動子24を移動させるリニアモータの駆動制御方法である。とくに、可動子24を可動子24の可動範囲の一端側に位置するストッパ23aに当接するまで移動させるステップと、可動子24がストッパ23aに当接した位置で、電磁石emに、当該位置での永久磁石maと電磁石emとの位置関係に応じた電流の電気角の初期値ipを与えるステップとを含む。
(もっと読む)
平面モータ
【課題】位置検出の構成を単純化して信頼性を向上させると共に、コストの低減を図ることが可能な平面モータを実現する。
【解決手段】格子状の歯が平面上に形成されたプラテンと、前記歯と対向する面モータを内蔵し前記プラテン上面を移動して位置制御されるスライダと、を具備する平面モータにおいて、前記スライダに、前記プラテンの歯と対向して前記スライダの位置を検出するレゾルバを備える。
(もっと読む)
特に工作機械の、傾斜した駆動軸の特性量の確定方法、並びにその適切な使用方法、対応する装置及びその使用方法
【課題】特に機械の傾斜した駆動軸の特性量を確定するための方法において従来の問題点を解決し得る方法を提供する。
【解決手段】機械の駆動軸の少なくとも1つの特性量K1〜K8を確定するための方法であって、軸は回転式の駆動ユニットないし直線式の駆動ユニットを用いて駆動され、軸のあらかじめ与えられた変位経路に沿って駆動ユニットに作用する順方向及び逆方向のトルクMF、MRないしそれに対応する力が測定され、エネルギーを保存するモーメントK2〜K4、K8ないしエネルギーを保存する力及び摩擦に依存するモーメントK1、K5〜K7ないし摩擦に依存する力の少なくともいずれかが、所属のトルクないし力の値の計算による重畳によって、方向に依存しない少なくとも1つの特性量K1〜K8として確定される。
(もっと読む)
電磁推進及び誘導システムの整流
モータの整流方法には調整電気角、および整流方程式の共通セットにおける調整電気角の使用が含まれ、それによって整流方程式の共通セットがモータの中で1次元と2次元力の両方を生成することが可能になる。  (もっと読む)
(もっと読む)
部品実装装置
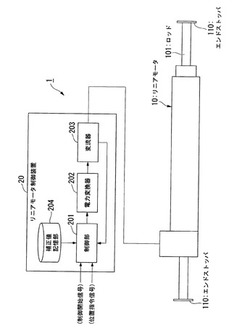
【課題】部品実装装置の起動時に実行されるリニアモータの磁極検出動作を、部品実装装置自体に大きな負荷をかけないで行うことを可能とする部品実装装置を提供する。
【解決手段】実装部品を基板上の所定箇所に搭載するための搭載ヘッド130と、該搭載ヘッド130を2次元的に移動可能とするための、サーボ制御されるリニアモータにより駆動される2本の平行な移動軸110a、110bとその間に掛け渡された移動軸120と、を有する部品実装装置において、前記2本の平行な移動軸110a、110bのうち、サーボフリーとなっている一方の移動軸110b(110a)側に前記搭載ヘッド130を移動させて、もう一方の移動軸110a(110b)を駆動するリニアモータに対して磁極検出動作が行なわれる。
(もっと読む)
駆動案内システムおよび誤動作検出方法
【課題】オーバーシュートの発生による駆動案内装置の誤作動を最小限に抑制する。
【解決手段】ステップST1で、リニアモータにおいてオーバーシュートが発生しているか否かの判定を行う。発生の検出までステップST1の判定を継続する。発生した場合、ステップST2に移行して、発生位置情報の検出を行う。過去において、同位置での発生情報が記憶されていなければ、ステップST4で第1の位置情報および第1のオーバーシュート量を発生情報として記憶する。他方、前回の発生情報が記憶されていれば、ステップST3で前回の第1のオーバーシュート量と比較され、第2のオーバーシュート量が第1のオーバーシュート量より大きい場合に、アラーム回路103からオーバーシュートの発生を報知する。
(もっと読む)
揺動アクチュエータ装置およびレーザ加工装置
【課題】簡単な構成でマグネット温度を制御し、トルク定数の変動を抑制することができる揺動アクチュエータ装置及びこのような揺動アクチュエータ装置を使用したレーザ加工装置を提供すること。
【解決手段】回転軸12と回転軸12の回りに配置されたマグネット13とからなる回転子と、この回転子の周りに配置されコイル14と、コイル14に電流を供給する電流供給手段とを備える揺動アクチュエータ装置において、電流供給手段を回転子を回転させる電流に加えて高周波電流を供給できる電流供給手段35にすると共に、マグネット13の温度を測定ための温度検出手段を設け、温度検出手段の測定結果に基づいて電流供給手段35がコイル14に供給する電流に高周波電流を重畳することによりマグネット13の温度を制御する。
(もっと読む)
リニアエンコーダ装置、リニアモータおよび単軸ロボット
【課題】リニアモータ等の装置における立ち上がり時間を短縮する。
【解決手段】リニアスケール11と、検出ヘッド12と、コントローラ20を備える。リニアスケール11は、インクリメント指標部15と基準指標部13とを有する。基準指標部13の各基準点情報13aは、基準指標部13から任意に抽出される3個の連続した情報のうち特定の情報と他の各情報とのピッチの組合せが、他の3個の情報に関する同組合せの何れとも異なるように情報間ピッチが設定されている。コントローラ20は、検出ヘッド12により連続する3個の基準点情報13を検出させ、これら情報に関する前記ピッチをインクリメント情報の検出信号に基づき演算し、さらにそのピッチの組合せに基づきリニアスケール11上の絶対位置を求める。
(もっと読む)
モ−タ駆動装置とそれを用いた露光装置
【課題】電源部とモ−タ駆動回路部等が一体的に筐体に配置されている回路構成と配線を、筐体のみそれぞれ別途分離したアンプラックを構成すると、分離された複数の電源部と複数のモ−タ駆動回路部等が、無秩序に配置され、散乱し、配線の引き回し等の無駄を生じる。
【解決手段】複数のモ−タにより駆動される駆動対象物と、モ−タを駆動するモ−タ駆動装置と、モ−タ駆動装置に電力を供給する電源部アンプユニットと、を備える露光装置であって、駆動対象物を駆動する複数のモ−タは、モ−タごとに各々一のモ−タ駆動回路を備え、モ−タ駆動回路は、駆動対象物の用途及び/又は目的ごとに、一の電源部アンプユニットに接続される露光装置とする。
(もっと読む)
リニアモ−タ装置及びこれを用いた露光装置
【課題】一つのストロ−クを構成する固定子上には一つの可動子が備えられ、その固定子に電流を供給するための電流ドライバも一つの構成では、二以上の可動子に対応することはできない。また、そのまま可動子を複数個搭載し、ストロ−ク上の一連の配設固定子コイルに電流を供給した場合には、供給電力ロスが大きくなったり、あるいは、選択的に固定子に電流供給する場合には、電流供給の可否を制御するスイッチや配線が多数必要になったりする問題が懸念される。
【解決手段】複数の可動子と、複数のコイルからなる励磁切り替え型固定子と、コイルに励磁電流を供給する通電手段を備えるリニアモ−タ装置であって、通電手段が、複数の可動子のうち少なくとも二以上の可動子が移動可能な共用コイル部へ、複数の可動子の位置に応じて、複数の励磁電流を選択的に供給するリニアモ−タ装置とする。
(もっと読む)
1 - 20 / 55
[ Back to top ]