
Fターム[5H560SS01]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289)
Fターム[5H560SS01]の下位に属するFターム
電池、バッテリ (747)
スイッチング電源 (27)
制御回路用電源が明記されているもの (9)
Fターム[5H560SS01]に分類される特許
41 - 60 / 506
ファンモータの駆動装置およびそれを用いた冷却装置、電子機器
【課題】ファンモータの駆動回路の小型化にある。
【解決手段】3相ブラシレス直流モータであるファンモータ6を駆動する駆動装置100が提供される。内蔵ホール素子9は、ファンモータ6に近接して配置され、ファンモータ6のロータの位置に応じたホール信号のペアを生成する。内部電源21は、内蔵ホール素子9にバイアス信号を供給する。ホール信号処理部11は、ホール信号のペアのオフセットをキャンセルするとともに、ホール信号を増幅する。駆動処理回路13は、ホール信号処理部11の出力信号にもとづきファンモータ6を駆動する。駆動装置100は、ひとつの半導体基板に一体集積化される。
(もっと読む)
セル多重インバータ

【課題】パルス電圧印加によりモータに回転トルクが発生することを抑制して磁極位置を推定でき、さらにモータからの騒音やモータの発熱を抑制して磁極位置を推定できる。
【解決手段】PMモータのU、V、W相に電圧を印加する各相アームは、セルユニットU1〜U3,V1〜V3の出力端をそれぞれ直列多重接続して各セルユニットの出力を重畳させた多段の電圧を出力するセル多重インバータにおいて、インバータ起動時に、セルユニットのうちの1つのセルユニットU3のみから磁極位置推定用のパルス電圧Vdcを出力し、このパルス電圧の電気角位相を変化させながらPMモータの電機子巻線に印加し、このパルス電圧によってPMモータの巻線に流れる電流変化で求められるインダクタンスから磁極位置を推定する。
(もっと読む)
モータの制御装置
【課題】指令速度電圧がばらついた場合でもモータの効率を向上でき、かつ、指令速度電圧が想定以上にばらついた場合でも安定した制御ができるモータの制御装置を得る。
【解決手段】モータの制御装置は、指令速度で動作するようにモータを制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記指令速度に応じて、位相の進角量をステップ的に制御する進角制御部と、前記制御された進角量で進角させた位相を用いて、前記駆動部を制御する駆動制御部とを備え、前記進角制御部は、前記指令速度に応じた指令速度電圧が第1の閾値を超えて大きくなった場合、前記進角量を第1の値から前記第1の値より大きい第2の値へ変更し、前記指令速度電圧が前記第1の閾値より小さい第2の閾値を超えて小さくなった場合、前記進角量を前記第2の値から前記第1の値へ変更する。
(もっと読む)
モータ駆動装置、モータ装置及びモータの駆動方法
【課題】従来に比して一段と確実に過負荷による駆動段パワー素子の破壊を防止することができるモータ駆動装置、モータ装置及びモータの駆動方法を提案する。
【解決手段】モータの駆動電流値と電流制限値との比較結果による駆動信号の制御により、駆動電流値が電流制限値に立ち上がると駆動電流の供給を停止し、駆動電流値の電流制限値への立ち上がりによる駆動信号の制御により、駆動電流値が電流制限値に立ち上がる場合には、一定の時間間隔で駆動信号の供給を停止するようにして、駆動電流値が電流制限値に立ち上がる頻度に応じて駆動信号の供給を停止する期間を増減する。
(もっと読む)
電動機およびそれを搭載した電気機器
【課題】圧力損失など静圧が変化しても風量の変化量が極めて少ない高精度な風量−静圧特性を実現した上で、湿度の変化に応じて、湿度が高い場合は送風量を多くできる送風装置を実現できる電動機の提供を目的としている。
【解決手段】磁石回転子3の磁極部3aをポリアミド6樹脂にて形成することで、同一分子長においてアミド基が多いために、アミド基と水素結合する水分子が、さらに湿度が高い領域では周囲の水分子を引きつけ、水分子−水分子の水素結合を形成して膨潤するため、磁石回転子3の磁極部3aの外径は大きくなり、エアーギャップ18は小さくなることとなり、駆動コイル2に誘起される誘起電圧は高くなり、駆動コイル2に供給する電流が同一であれば、誘起電圧が高くなった分、軸トルクは高くなる電動機とすることができるので、常湿時に対して高湿時には換気風量が増加する風量−静圧特性が得られる。
(もっと読む)
モータ駆動回路、方法およびそれを用いた冷却装置、電子機器
【課題】より効率的にモータを駆動可能な駆動装置を提供する。
【解決手段】ゼロクロス検出コンパレータ10は、ファンモータ6のロータの位置を示す互いに逆相のホール信号のペアH+、H−を比較し、それらが交差するゼロクロスタイミングごとにレベルが遷移するゼロクロス検出信号S1を生成する。制御回路20は、ゼロクロス検出信号S1を受け、(1)ゼロクロスタイミングごとに駆動相を切りかえ、モータを回転駆動するとともに、(2)各ゼロクロスタイミングより第1時間幅τ1前の第1時刻から、各ゼロクロスタイミングより第1時間幅τ1よりも短い第2時間幅τ2後の第2時刻までの間、モータを回生制御する。
(もっと読む)
正転逆転切替装置
【課題】チョッパ信号やPWM信号でホール素子を駆動する、トルクリップルが小さくてトルクの大きい直流同期電動機を正回転あるいは逆回転させるための正転逆転切替装置を提供する。
【解決手段】回転子の周囲に、界磁巻線が配備され、回転子の磁極位置を検出する検出手段から出力される出力信号により、界磁巻線組に供給される励磁電流を制御して、所定の回転速度を得る電動機の回転を正方向と逆方向とに切替える正転逆転切替装置であって、一の検出手段から出力される出力信号により励磁電流が供給される第一の界磁巻線組及び第二の界磁巻線組のうちの何れか一方を選択する選択子が複数具備された選択手段と、正方向の指令を受けたとき、選択子に第一の界磁巻線組を選択させ、逆方向の指令を受けたとき、選択子に第二の界磁巻線組を選択させる選択子切替手段とを備えた。
(もっと読む)
モータ駆動回路
【課題】単相ブラシレスDCモータの起動時の回転数が安定するとともに、逆起電圧および騒音の発生を抑制する。
【解決手段】モータ1の制御部13は、位置推定部14と、カウンタ部15と、出力波形生成部16と、PWM生成部17とを有する。モータ1の起動時のソフトスイッチング動作として、コイル7に一定のデューティ比のパルス状の駆動電圧を印加する期間T3の直後に、時間の経過とともにパルス幅が小さくなる駆動電圧を印加する期間T4を設けるため、コイル7への逆起電力の発生を確実に防止でき、騒音が軽減され、振動も抑制できる。
(もっと読む)
インバータ制御装置
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】共振型フィルタを用いてモータの振動と騒音を抑制する場合に、脱調や起動不良の発生を解消し、モータの制御も支障無く行うことができるモータ制御装置する。
【解決手段】負荷トルクの変動に対応して変動する制御値を受け、制御値の周期的な変動成分を強調することにより電流補正値を生成する共振型フィルタ30と、共振型フィルタによる変動成分の強調度合いであるゲインを制御するゲイン制御部32を備える。電流補正値を電流指令値に重畳することにより、重畳電流指令値を生成し、重畳電流指令値に従ってモータの制御を行う振動抑制制御を実行する。ゲイン制御部は、振動抑制制御の開始時、所定の目標値に対して徐々にゲインを増加させる。
(もっと読む)
ファンモータ駆動装置およびそれを用いた冷却装置
【課題】冷却ファンに付着した埃を除去する。
【解決手段】複数のコンパレータCMPU〜CMPWはそれぞれ、複数のコイルLU〜LWごとに設けられ、対応するコイルの一端に生ずる逆起電力VU〜VWを、複数のコイルの中点電圧VCOMと比較し、比較結果を示す逆起電力検出信号BEMFU〜BEMFWを生成する。駆動信号合成回路14は、複数のコンパレータCMPU〜CMPWの出力にもとづいて、(i)ファンモータ6の駆動開始後の所定の反転期間の間、ファンモータ6を通常運転時とは反対方向に回転させ、(ii)その後、ブレーキ期間の間、ファンモータ6にブレーキをかけ、(iii)続く通常駆動期間において、ファンモータ6を通常運転時の方向に回転させるための駆動制御信号S4を生成する。駆動回路16は、駆動制御信号S4にもとづきファンモータ6を駆動する。
(もっと読む)
DCモータ天井扇風機
【課題】起動時の回転子の位置決めをすることなく、確実にモータを所望の方向に回転させ、使用者に逆転による不安感を与えないDCモータ天井扇風機を提供する。
【解決手段】ブラシレスDCモータの回転子磁石(磁石6)の磁極位置をセンサレスで検出する位置検出手段15を備え、天井扇風機を停止させるときに、ブラシレスDCモータの特定の相に一定の時間以上通電し、前記天井扇風機の羽根の停止位置が、最終の通電相に対して常に一定になるように制御する停止位置固定手段17を備えたので、停止した状態から、通常の回転動作に移行することが可能になる。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
電動機およびそれを搭載した電気機器
【課題】圧力損失など静圧が変化しても風量の変化量が極めて少ない高精度な風量−静圧特性を実現した上で、湿度の変化に応じて、湿度が高い場合は送風量を多くできる送風装置を実現できる電動機の提供を目的としている。
【解決手段】磁石回転子3の磁極部3aをポリアミド6樹脂にて形成することで、同一分子長においてアミド基が多いために、アミド基と水素結合する水分子が、さらに湿度が高い領域では周囲の水分子を引きつけ、水分子−水分子の水素結合を形成して膨潤するため、磁石回転子3の磁極部3aの外径は大きくなり、エアーギャップ18は小さくなることとなり、駆動コイル2に誘起される誘起電圧は高くなり、駆動コイル2に供給する電流が同一であれば、誘起電圧が高くなった分、軸トルクは高くなる電動機とすることができるので、常湿時に対して高湿時には換気風量が増加する風量−静圧特性が得られる。
(もっと読む)
モータの制御装置
【課題】従来品よりも騒音やスイッチングロスの低減をバランスよく実現できるモータを安価に提供できるようにする。
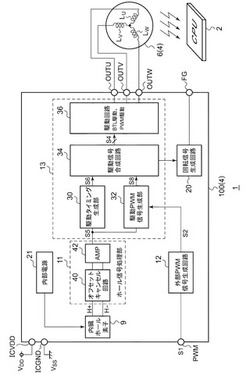
【解決手段】コイル群の各相に駆動電流を供給するインバータ回路20、所定の入力信号に従ってインバータ回路20をPWM方式により制御し、ロータ3を所定の回転速度で駆動する制御回路30を備える。制御回路30は、予め設定された所定の基準値を出力する波形切替設定部34や前記入力信号と前記基準値とを比較する比較部35、通電信号形成部39を含む。通電信号形成部39は、比較部35から入力される比較結果信号に基づいて、印加電圧の波形が矩形状である第1通電方式と、印加電圧の波形が台形状又は正弦曲線状である第2通電方式とに切り替える。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】低回転時であってもロータの回転位置を確実に検出でき、従来よりも低回転駆動を可能にしたセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95WにPWM方式によりデューティ比を可変とした電源電圧Vccを供給するインバータ回路2と、PWM信号SPを生成するPWM生成回路3と、PWM信号SPの特定位相で動作し端子に誘起される誘起電圧に基づいて回転位置を検出する位置検出回路3と、回転位置に基づき通電時間帯のタイミングを制御するインバータ制御回路4とを備えるセンサレスブラシレスモータ9の駆動装置1であって、インバータ制御回路4およびインバータ回路2における伝達遅延時間に応じてPWM信号SPを遅延させた位置検出用PWM信号PSDを生成するPWM遅延回路6をさらに備え、位置検出回路3は位置検出用PWM信号PSDの特定位相で動作する。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】予め進み角テーブルを用意する手間が不要で、モータの特性の違いや個体差、三相間の構造上のばらつきに依存せず適正に進み角を制御して良好なモータ効率を発揮できるセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95Wに電源電圧Vccを供給する電源回路(インバータ回路2)と、端子の誘起電圧に基づいて回転位置を検出する位置検出回路3と、回転位置に基づき進み角を考慮して通電時間帯のタイミングを制御する電源制御回路4とを備え、電源制御回路4は、誘起電圧の立上り前期時間および立上り後期時間のセットならびに誘起電圧の立下り前期時間および立下り後期時間のセットのうち少なくとも1セットを検知する時間検知部41と、前期時間と後期時間との大小関係を判定する進み角判定部42と、大小関係の判定結果に基づいて進み角を加減調整する進み角調整部43と、を有する。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
センサレスブラシレスモータの駆動装置
【課題】三相独立方式により誘起電圧を減少させることなく検知し回転位置を高精度に検出して低回転駆動を可能にし、かつコストの増加を抑制したセンサレスブラシレスモータの駆動装置を提供する。
【解決手段】電機子巻線の三相の端子95U、95V、95Wに電源電圧Vccを供給する電源回路(インバータ回路2)と、端子の誘起電圧VSwに基づいて回転位置を検出する位置検出回路3と、回転位置に基づき通電時間帯のタイミングを制御する電源制御回路4とを備えるセンサレスブラシレスモータ9の駆動装置1であって、位置検出回路3は、いずれか一相の誘起電圧を選択して出力する切り替えスイッチ33と、いずれか一相の誘起電圧を所定の基準電圧と大小比較して比較結果を出力する比較器34と、比較結果の変化タイミングを以ってロータの基準回転位置を検出する位置検出部37と、を有する。
(もっと読む)
駆動装置
【課題】電動機を駆動するインバータでの損失の低減を図る。
【解決手段】トランジスタTr1〜Tr6よりもダイオードD1〜D6の導通抵抗が小さいインバータ24を用いるものにおいて、静電容量が可変の静電容量可変回路28a〜28cを有しモータ22とインバータ24との間でやりとりされる電力の力率であるモータ電力力率PFを調整可能な力率調整回路28を設ける。そして、静電容量調整回路28a〜28cの静電容量の調整によってモータ電力力率PFを悪化させる。これにより、インバータ24とモータ22との間で流れる電流の一周期のうちトランジスタに電流が流れる時間を短くすると共にダイオードに電流が流れる時間を長くすることができ、インバータ24での損失を低減することができる。
(もっと読む)
41 - 60 / 506
[ Back to top ]