
Fターム[5H560SS01]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289)
Fターム[5H560SS01]の下位に属するFターム
電池、バッテリ (747)
スイッチング電源 (27)
制御回路用電源が明記されているもの (9)
Fターム[5H560SS01]に分類される特許
21 - 40 / 506
インバータ制御装置、インバータ装置、及び空気調和機
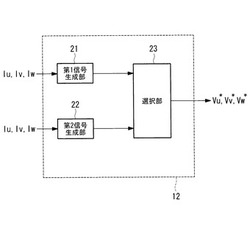
【課題】スイッチング損失を低減するとともに、制御方式の切り替えを円滑に行うことを目的とする。
【解決手段】2アーム変調方式を採用し、正弦波状の基準電圧指令信号を補正して第1電圧指令信号を生成する第1信号生成部21と、正弦波状の基準電圧指令信号にその第3次高調波成分を重畳させた波形の振幅の最大値が搬送波の振幅以上になるような過変調方式による第2電圧指令信号を生成する第2信号生成部22と、第1信号生成部21の基準電圧指令信号の振幅が、該基準電圧指令信号の最大振幅値に設定された第1閾値未満の場合に第1電圧指令信号を選択し、該基準電圧指令信号の振幅が該第1閾値と等しい場合に第2電圧指令信号を選択する選択部23と、選択部23によって選択された電圧指令信号と搬送波とを比較することによりパルス幅変調信号を生成するPWM信号生成部とを備えるインバータ制御装置を提供する。
(もっと読む)
モータ駆動回路

【課題】 PWM信号のキャリア周波数を基本波とする高調波成分の影響を低減する。
【解決手段】 モータの回転子の回転位置を示す位置信号に基づいて前記モータの駆動コイルへの通電位相を制御する位相制御回路と、前記通電位相に応じたパルス幅変調信号を生成するパルス幅変調回路と、前記パルス幅変調信号に応じて前記駆動コイルに駆動電流を供給する出力回路と、前記通電位相に応じて前記パルス幅変調信号の周波数を切り替える周波数切替回路と、を有する。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
ブラシレス電気機械、それを備える装置、移動体、発電機、及びロボット
【課題】ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
(もっと読む)
DCモータ及びこれを備えたポンプ
【課題】低損失・低ノイズとする。
【解決手段】磁界発生用のコイル27と、コイルへの通電をPWM制御する制御部2を有するとともに、前記コイルへの通電によって回転駆動されるロータと、前記ロータの回転角を検知する回転角検知手段3と、前記ロータの回転速度を検出する回転速度検出手段4とを備えており、前記制御部2は前記回転角検知手段と前記回転速度検出手段からの出力信号を受けて、PWMキャリア周波数を決定するとともに外部からの能力可変信号に合わせてPWM制御のデューティを決定し、決定したPWMキャリア周波数とデューティで前記コイルへの電力供給を行う。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】所定のスイッチング周期において、ハイ側スイッチング素子のオンデューティとロー側スイッチング素子のオンデューティとを独立に設定可能なPWM演算部25を備え、PWM演算部25は、前回までの複数のスイッチング周期におけるオンデューティの積算値を算出する通電割合演算部25aを備える。PWM演算部25は、通電割合演算部25aによって算出されたオンデューティの積算値に基づいて、順方向電流が流れていないスイッチング素子のオンデューティを設定する。
(もっと読む)
モータ制御装置
【課題】電流オフセット値の急激な変化を抑制して、安定した操舵フィーリングを維持できるモータ制御装置を提供する。
【解決手段】モータ電流がゼロとみなされる状態で検出されたドリフト電流の検出電流値を電流オフセット値として設定し、当該電流オフセット値によりモータ電流の検出電流値を補償するモータ制御装置において、所定の周期Tごとにドリフト電流を検出し、検出したドリフト電流の検出電流値に基づいて、周期Tごとに目標オフセット値を設定する。電流オフセット値が目標オフセット値より小さい場合は、電流オフセット値に補正値Kを加算し、電流オフセット値が目標オフセット値より大きい場合は、電流オフセット値から補正値Kを減算することにより、電流オフセット値を周期Tごとに補正する。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
ブラシレスDCモータのセンサレス制御装置
【課題】 強制転流モードからセンサレス制御モードへの移行がスムーズに行われるブラシレスDCモータのセンサレス制御装置を提供する。
【解決手段】 指令回転数=初期回転数として(S2)、強制転流モード(S3)を開始する。強制転流モード(S3)は、所定上昇幅で回転数を増加して(S5)、設定回転数に達するまで(S4)行う。そして、回転数が設定回転数に到達し(S4)かつロータ位置が検出可能となったとき(S6)に、センサレス制御モード(S7)に移行する。
(もっと読む)
ブラシレスモータの駆動制御装置および回転異常検出方法
【課題】ハンチング現象と逆転状態とを正しく区別でき、かつハンチング現象が生じたことを正確かつ迅速に検出できる。
【解決手段】駆動制御装置1は、インバータ回路2と、プリドライブ回路3と、制御回路部4と、回転位置検出器5とを備え、制御回路部4は、ハンチング検出部6を有する。ハンチング検出部6は、回転位置検出器5から出力されて単位時間ごとにパルス列が変化する複数のパルス信号に基づいて、ブラシレスモータ10にハンチング現象が生じたか否かを検出する。ハンチング検出部6は、最新のパルス列とそれ以前のパルス列とに基づいて、ロータの回転方向の変化とロータの回転方向が変化した回数とを単位時間ごとに検出し、これらの検出結果に基づいてハンチング現象が生じたか否かを判断する。
(もっと読む)
モータ制御装置
【課題】モータを素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10に供給する電圧で規定された制御条件、又は、3相モータ10に供給する電圧及び3相モータ10を制御するPWM信号の周波数の関係で規定された制御条件の少なくともいずれか一方が記憶されてある制御条件記憶部3と、3相モータ10を動力源とするポンプ30で流通させる粘性流体の温度に基づいて、制御条件記憶部3から制御条件を抽出する制御条件抽出部2と、3相モータ10の起動時に、抽出された制御条件に基づくPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、を備える。
(もっと読む)
モータ制御装置
【課題】確実にモータを起動することが可能であり、低コストのモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10の起動時に、予め設定された周波数を有するPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、3相モータ10が有する各端子41−43の端子電圧と、予め設定された基準電圧Vrefとを比較する比較部5と、当該比較部5の比較結果に基づいて3相モータ10が有するロータの位置を検出する検出部3と、当該検出部3が周波数に対応する時間内にロータの位置が検出できなかった場合に、PWM信号の周波数を、検出できなかった場合のPWM信号の周波数と異なる周波数に設定する周波数設定部2と、を備える。
(もっと読む)
ブラシレスモータの駆動装置
【課題】パルス誘起電圧に基づく通電モードの切り替えタイミングの判定をより安定して行え、脱調の発生を未然に抑制できるブラシレスモータの駆動装置を提供する。
【解決手段】3相ブラシレスモータの3相のうちの非通電相に、パルス印加電圧によって誘起されるパルス誘起電圧と閾値とを比較して、通電モードの切り替えタイミングを判定するセンサレス制御を行う。ここで、パルス印加電圧のデューティ制御におけるデューティ比を、パルス誘起電圧の振れ時間,A/D変換時間,電圧検出回路の分解能などに基づき設定した下限値以上に制御する。これによって、パルス誘起電圧の振れ時間内でパルス誘起電圧をサンプリングしたり、A/D変換中にパルス電圧の印加が停止されてしまうことを抑制でき、パルス誘起電圧の検出精度が向上して、脱調の発生を抑制できる。
(もっと読む)
ロータ位置検出装置
【課題】モータの回転数を高くした場合でも適切にロータの位置を検出することが可能なロータ位置検出装置を提供する。
【解決手段】ロータ位置検出装置100は、所定の周波数を有するPWM信号でインバータ11が有するスイッチング素子Q1−Q6を制御するPWM制御部1と、PWM信号の1周期分に対応する、3相モータ10が有する各端子41−43の端子電圧において、当該端子電圧と予め設定された基準電圧Vrefとの大小関係を少なくとも2回以上判定する判定部2と、当該判定部2の判定結果に基づいて3相モータ10が有するロータの位置を検出する検出部3と、を備える。
(もっと読む)
回転電機制御装置
【課題】可変磁束型の回転電機の運転状態や界磁磁束の調整によるロータ表面の磁気抵抗の変化などを考慮して界磁磁束の調整を最適に制御することを可能としつつ、界磁調整のためのロータ間位相の調整量を少なく抑えることができる技術を提供する。
【解決手段】第1ロータ41と第2ロータ42との相対位置を示す位相指令γ*が、目標トルクT*及び回転速度ωに応じて規定された位相マップ70として、界磁磁束が最大となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された低回転速度域位相マップ7Lと、界磁磁束が最小となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された高回転速度域位相マップ7Hとを有する。相対位相制御部7は、回転速度ωに基づいて、低回転速度域位相マップ7Lと高回転速度域位相マップ7Hとを切り換えて参照し、位相指令γ*を決定して、相対位置を調整する。
(もっと読む)
モータ制御装置および空気調和機
【課題】風等の外乱によるフリーランでファンモータは発電機となり直流電圧が発生し部品の耐圧を超え故障にいたるという問題があった。
【解決手段】制御器回路やインバータ駆動回路の電源をつくる電圧変換器を平滑キャパシタに接続し、ファンモータのフリーランで平滑キャパシタに発生する直流電圧を直流電圧検出器で検出し、ある値を超えたらインバータ回路の下アームを全相オンさせ、誘起電圧をショートし、平滑キャパシタに発生した直流電圧は電圧変換器を介して制御器回路やインバータ駆動回路で消費させることで直流電圧が部品の耐圧を超えることを防止する。これによりダイナミックブレーキ回路を付加せず、ベクトル制御を用いず、高効率,安価,高信頼性なファンモータの制御装置が実現できる。
(もっと読む)
モータ制御装置
【課題】3相モータをスムーズに且つ素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、動作命令及び停止命令に基づいてインバータが有するスイッチング素子に通電して3相モータ7の回転を制御する通電制御部50と、停止命令に基づき、次の動作命令とは無関係に通電制御部50に対して3相モータ7が有する3つの端子のうち予め設定された2つの端子間への通電及び当該通電の停止を指示する通電指示部10と、を備える。
(もっと読む)
ブラシレスDCモータおよびそれを搭載した送風装置
【課題】ブラシレスDCモータとそれを搭載した送風装置において、回転数に対して最適な進角値を得て高効率で低振動低騒音を実現することを目的とする。
【解決手段】ブラシレスDCモータ2の通電位相を進み位相に補正する進角補正手段10と、外部回路4からの出力指示値より前記進角補正手段10の進角値を生成する進角生成手段12を有し、前記進角生成手段12は、前記外部回路4からの出力指示値に対して閾値を設け、前記閾値を境に前記進角補正手段10の進角値をゼロから線形的に変化させる構成としたことにより、回転数に対して最適な進角値を得ることができ、高効率で低振動低騒音を実現することができる。
(もっと読む)
永久磁石モータ駆動システム
【課題】回転子に設けられた永久磁石の磁極を判別でき、実用性に適した永久磁石モータ駆動システムを提供することにある。
【解決手段】回転子にコイルとダイオードが直列に接続された磁束変化抑制回路が組み込まれた永久磁石モータ1を駆動するための電力を供給するインバータ2を制御して、永久磁石モータ1を駆動制御する永久磁石モータ駆動システム10において、制御装置5は、コイルに鎖交する軸方向に磁束変化させる界磁電圧を発生させ、インバータ2の電流応答Iuvwを検出して、回転子の永久磁石をNS極判別し、NS極判別結果を用いてインバータ2を制御する。
(もっと読む)
圧縮機モータ制御装置
【課題】トルク脈動に対する速度変動により、回転速度・位置推定演算の推定誤差が過大となる状態が発生する。
【解決手段】予め決められた一回転中の複数の各位置において回転速度が限界最低速度を下回った場合の速度補償値を記憶し、記憶された速度補償記憶値により前記複数位置における電流指令を補正する電流指令補正器を備え、回転速度が限界最低速度を下回らないように速度補償を行う。これにより、高調波の影響を抑制し安定した駆動を得られる圧縮機モータ制御装置を提供することができる。
(もっと読む)
21 - 40 / 506
[ Back to top ]