
Fターム[5H560SS01]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289)
Fターム[5H560SS01]の下位に属するFターム
電池、バッテリ (747)
スイッチング電源 (27)
制御回路用電源が明記されているもの (9)
Fターム[5H560SS01]に分類される特許
141 - 160 / 506
モータ駆動制御装置
【課題】 相電流検出のためのDCリンク電流検出タイミングを電圧指令信号の値に応じて変化させずに所定タイミングに固定して相電流検出を可能とし、電流検出タイミングを制御する回路や処理を低減する。
【解決手段】 所定のタイミングで値が更新される複数相の電圧指令信号をキャリア信号によりパルス幅変調して生成される少なくとも1相のPWM信号のパルス幅が、電圧指令信号の値の増加に応じて、電圧指令信号の値更新周期の前端を基準として後端方向へ増加し、この後端方向にパルス幅の増加したPWM信号とは別の少なくとも1相のPWM信号のバルス幅が、電圧指令信号の値の増加に応じて、電圧指令信号の値更新周期の後端を基準として前端方向へ増加するよう、PWM手段が複数相のPWM信号を生成する。
(もっと読む)
モータ駆動装置

【課題】従来技術と比較して回路規模及びコストが小さくなり、かつ過電圧の発生を防ぐ。
【解決手段】カソードが、一端が電源とモータとの接続端に接続された第1の抵抗の他端に接続され、アノードが、ゲート端子に接続され、かつツェナー電圧が、電源の電源電圧より大きくかつトランジスタの耐電圧より小さいゲート過電圧保護用ツェナーダイオードと、一端が、電圧印加部に接続されると共に、他端がゲート過電圧保護用ツェナーダイオードのアノードに接続され、逆電圧がツェナー電圧より大きくなってゲート過電圧保護用ツェナーダイオードに逆電流が流れた際に、逆電流の流入によって発生する電圧によりゲート端子に所定値以上の電圧を印加する大きさの抵抗値を有する第2の抵抗とを含む。
(もっと読む)
モータ制御装置
【課題】本発明の課題は、インバータ停止時において、外力によってモータが回転させられた時の誘起電圧による過電圧を防止することにある。
【解決手段】モータ制御装置に、インバータ回路の起動指令が停止指令である時かつモータの回転数が所定値を超えた時に回転数を減速させる停止時速度制御手段を備えることによって、インバータ停止時においても外力によってモータが回転させられた場合、モータの回転数を減速させて誘起電圧による過電圧を防止することができる。
(もっと読む)
電力変換装置
【課題】絶対位置を検出することのできない不知の電動機を駆動する際、特に電動機の定数を取得するオートチューニングで初期磁極位置推定を行う場合には、電動機の定数が必要な手段を用いて所定の電流を得るのに必要な出力電圧値を決めることはできないため、簡易な手段で所定電流を流す電圧指令を自動的に決定する。
【解決手段】指定された電流指令となるように決めたい出力電圧値に対し、PWM出力にかかわるキャリア周波数と出力電圧を制御する。出力電圧を単調に増加させるとともにキャリア周波数を可変し、PWMパルスを単調に広げることで、電流をある一定の上昇幅で上昇させる。決められた電流値に到達した時点の出力状態であるキャリア周波数と出力電圧を一意的に決定する。
(もっと読む)
モーター駆動装置
【課題】振動又は騒音のような物理量とモーター(インバーター含む)の消費電力とを共に低減する、又は、いずれか一方が閾値以下という条件下でもう一方を最小化するモーター駆動装置を得る。
【解決手段】位相補正手段33は、残った位相補正パターンの中から電流値[A]が最小である位相補正パターンを選択し、その位相補正パターンにおける位相補正量[度]を、電流位相18に加算する位相補正量として設定する。
(もっと読む)
電動パワーステアリング装置
【課題】ブラシレスモータの相間短絡を迅速に判定し、かつ、相間短絡が発生しても継続して操舵アシスト制御が可能な技術を提供する。
【解決手段】電動パワーステアリング装置は、相電流が、所定の短絡による過電流の状態と所定の回生による過電流の状態とを、交互に繰り返す発振状態に至ったと判定したときに、制御部51内に、前記短絡が発生したと判定する相間短絡判定部と、相間短絡判定部で判定された結果に基づき相間短絡発生相を検出し、この相間短絡発生相に接続されるスイッチング素子のデューティを制限してスイッチング素子の過電流発生を抑制し、操舵アシスト制御を継続して行う操舵アシスト制御部とを有する。
(もっと読む)
自動車のモータ制御装置
【課題】交流モータに流れる電流を検出する電流センサのゲイン誤差による電流検出値のずれを補正できるようにする。
【解決手段】交流モータ17の制御開始前の交流モータ17の停止中に、交流モータ17のトルク発生に寄与しない無効電流を交流モータ17に流すように指令する無効電流指令を行い、この無効電流指令を行ったときの指令電流ベクトル(Id ,Iq)からV相及びW相の電流指令値Iv ,Iw を求め、こられらのV相及びW相の電流指令値Iv ,Iw (実電流の代用情報)とV相及びW相の電流センサ38,39の出力(電流検出値iv ,iw )とからV相及びW相の電流センサ38,39のゲイン誤差kv ,kw を算出する。これらのゲイン誤差kv ,kw を用いて電流センサ38,39の出力を補正することで、電流センサ38,39のゲイン誤差による電流検出値iv ,iw のずれを補正する。
(もっと読む)
画像読取装置
【課題】本発明は、読取駆動をバイポーラ駆動で、復帰駆動をユニポーラ駆動に切替えることで、読み取り精度を高め、しかも高速復帰が可能な画像読取装置の提供。
【解決手段】原稿面を読取るために移動可能なキャリッジ体と、キャリッジ体を読取原稿サイズに応じ読取駆動と復帰駆動させる三相直流モータと駆動制御手段からなる駆動手段とを備え、前記駆動制御手段は、三相の共通接続端部に接続する共通端子と、その共通端子を電源に対しON、OFF状態に切り替える第1の切り替え手段と、第1の切り替え手段をON状態とし三相の一相の巻線に通電を行うユニポーラ駆動と、OFF状態とし三相の二相の巻線に通電を行うバイポーラ駆動とに切替える第2の切替え手段と、原稿サイズに応じた反転信号を受け、前記第1、第2の切替え手段を制御する制御手段とを具備。
(もっと読む)
モータ制御装置及び洗濯機
【課題】ロータに配置されている低保磁力の永久磁石の着磁状態を変化させる場合に、騒音の発生を防止できるモータ制御装置を提供する。
【解決手段】着磁制御部58は、インバータ回路52を介して巻線5に通電を行うことで、永久磁石モータ1のロータ3に配置されているアルニコ磁石9bの着磁量を変化させる場合、d軸電流指令Id#com2と同時にq軸電流指令値Iq_refcを出力することで、d軸電流Idの通電と同時にq軸電流Iqを通電し、d軸電流Idの通電に伴い発生するリラクタンストルクを打ち消すようにマグネットトルクを発生させる。
(もっと読む)
空気調和機
【課題】空気調和機において、従来の構成では、圧縮機駆動DC電圧が変動してもモータ電流位相の進み度合いを変えていないため、最大負荷で運転可能となるようにモータ電流位相の進み幅を抑える必要があり、その結果、最大暖房能力が低減するという課題を有していた。
【解決手段】圧縮機1のブラシレスDCモータの回転数と圧縮機駆動DC電圧を検知し、モータの電流位相の進み度合いを制御することによって、冷凍サイクルの負荷に応じてモータの回転数を最大限まで高くすることが可能となり、最大暖房能力を大幅に向上させることができる。
(もっと読む)
ロータ位置検出装置
【課題】一部に磁力が異なる永久磁石をロータに配置した永久磁石モータに対し、低コストの磁気検出センサを用いてロータ位置を正確に検出する。
【解決手段】永久磁石モータ1が、ロータ3に、磁力が異なる2種類の磁石,ネオジム磁石9aとアルニコ磁石9bとを配置して構成される場合、速度・位置検出部55は、3つのホールセンサ68(A,B,C)を用いて永久磁石モータ1の回転速度を検出すると、その回転速度に基づいてロータ3の位置を検出する。そして、速度・位置補正部80は、ホールセンサ68により出力されるセンサ信号の変化状態からネオジム磁石9aとアルニコ磁石9bとの境界を検出すると、速度・位置検出部55により検出される回転速度又はロータ位置を補正する。
(もっと読む)
モータ制御装置
【課題】位置センサレス方式で永久磁石モータを制御すると共に、永久磁石の磁束を変化させるために通電を行う構成において、増減磁電流を遅れ無しに通電できるモータ制御装置を提供する。
【解決手段】モータ制御装置50は、速度・位置推定部55が永久磁石モータ1について成立する電圧方程式に基づいて、ロータ3の回転位置θを推定し、その推定された回転位置θに基づいてd軸電流及びq軸電流を演算することで、永久磁石モータ1をベクトル制御する。そして、着磁制御切替え部63は、モータ制御装置50が、ベクトル制御のフィードバックループ内にPI制御を組み込んでいる場合、着磁制御部61が着磁制御を行う期間は、ベクトル制御における電流指令Id_refを電流制御部67のd軸側に与える制御と、電流指令Id_refに替えて電圧指令Vd_refをdq/uvw座標変換器71に直接出力する制御とを切り替える。
(もっと読む)
電気車制御装置
【課題】 列車の惰行走行時や停止時も回転子位置や周波数を推定可能な電気車制御装置
を提供することを達成する。
【解決手段】 永久磁石同期電動機1を駆動制御する装置において、永久磁石同期電動機
1の電圧値を検出する電圧センサ2から得た情報を電気車の駆動制御に用いる。本発明の
電気車制御装置は、電力を直流から交流に変換するインバータ5と、前記インバータ5か
ら供給される交流電力により駆動される永久磁石同期電動機1と、前記永久磁石同期電動
機1の電動機電圧を検出する電圧センサ2と、前記インバータ5と前記永久磁石同期電動
機1を開放する開放用接触器3と、前記電圧センサ2から得た電動機電圧を元に前記電気
車の駆動制御に用いる手段を備える。
(もっと読む)
車載電動機の駆動装置
【課題】駆動装置50のコンデンサ71から電荷を放出する。
【解決手段】駆動装置50のインバータ回路70は、トランジスタ70a、70b、…70fのスイッチング動作に伴って、直流電源81の出力電圧とコンデンサ71の出力電圧とに基づいて、共通接続点T1、T2、T3からステータコイル31aに出力される三相交流電流を出力する。インバータ制御回路72は、電子制御装置90からのメインリレーオフ信号を受信すると、システムメインリレー82がオフされたと判定して、トランジスタ70a、70c、70eをそれぞれオフした状態で、トランジスタ70b、70d、70fのそれぞれをオンさせる。これにより、ステータコイル31aおよび負極母線側のトランジスタ(70b、70d、70f)を介して、コンデンサ71のプラス電極からマイナス電極に電流が流れ、コンデンサ71に蓄えられた電荷を放出することができる。
(もっと読む)
モータ駆動制御回路
【課題】モータ回転数によらず、駆動電圧波形を好適なものにする。
【解決手段】 モータ12の駆動を制御する。モータ12の誘起電圧波形を誘起電圧検出回路16により検出する。駆動タイミング回路16は、検出した誘起電圧波形に対し所定位相になるように駆動電圧波形を決定し、出力回路10を制御して決定された駆動電圧波形となるようにモータ駆動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】3相ブラシレスモータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続することができる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて電動モータ12を駆動する。その際、電気角θeが加速領域内にあるときには、3相ブラシレスモータ12の回転を操舵方向へ加速するべく異常時相電流指令値を増加減する補正を行う。
(もっと読む)
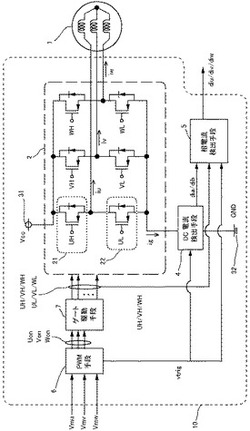
電動機の駆動装置および空気調和装置
【課題】インバータ手段の制御を安定して行えるようにして、最適かつ安定に駆動させることができる電動機の駆動装置等を得る。
【解決手段】直流電源10による直流電圧を変換して電動機8に交流電圧を印加するインバータ手段9と、直流電源10とインバータ手段9との間に接続されたシャント抵抗14と、シャント抵抗14の両端電圧のピーク値を、コンデンサに充電して保持するための充電手段と、充電手段に充電された電荷を第一の時定数にて放電するための放電手段と、シャント抵抗14に流れる電流を検出する電流検出手段と、電流検出手段が検出した電流が所定の値となるように、インバータ手段9が電動機8に印加する交流電圧の周波数を制御するインバータ制御手段11とを備える。
(もっと読む)
永久磁石同期電動機の駆動装置
【課題】同期電動機の制御を実現する制御装置および制御方法において、直交2軸上で同じ高周波電圧指令を生成すると、三相各相での印加電圧に違いが生じ、発生した脈動電流の検出値を使った初期磁極位置推定の推定精度が悪くなる。
【解決手段】永久磁石同期電動機に、正と負に交番する高調波電圧を印加する際、印加する電圧位相を120度ずつ順次切り替え、3つの位相に印加する。前記高周波電圧の印加により生じる脈動電流を、電力変換器の三相の出力電圧が、全て正または全て負となる状態から、少なくとも一相の出力電圧が変化してから所定の時間Δtだけ経過したタイミングで検出する。なお、電流の検出は、直流母線につけた直流抵抗、または、相電流センサを用いる。磁極位置推定手段は、前記電流検出値より得られた三相電流の正側の変化量と負側の変化量の差に基づき、前記永久磁石同期電動機の回転子磁極位置を算出する。
(もっと読む)
センサレスモータ用インバータ制御回路及びこれを備えるセンサレスモータ制御装置
【課題】必要トルクに応じたq軸指令電流の制御を行い得るセンサレスモータ制御装置と、当該センサレスモータ制御装置を実現させ得るセンサレスモータ用制御回路を提供する。
【効果】本発明に係るセンサレス用制御回路では、制御軸qc−dcと磁束ベクトルΦとの間に生じた位相差Δθに対応させて切換時q軸指令電流が制御されるので、強制運転動作の終了時での電流値は負荷に応じた値とされる。また、本発明に係るセンサレスモータ制御装置によれば、センサレスモータ用制御回路によってq軸指令電流の電流値が負荷に応じて設定されるので、センサレスモータ300の回転子302は、負荷に合致した円滑な駆動が実現される。
(もっと読む)
モータ駆動装置およびモータ駆動方法
【課題】起動期間においてモータコイルへの電流供給効率を向上する。
【解決手段】モータ駆動装置は、モータが起動してからモータの回転数が目標回転数に達するまでの起動期間において、モータの回転数を検出し、当該検出した回転数に応じた制御信号(72)を出力する回転数検出手段(52)と、制御信号(72)に応じてPWM周波数を高くするPWM周波数変更手段(53)とを備えている。
(もっと読む)
141 - 160 / 506
[ Back to top ]