
Fターム[5H572BB02]の内容
Fターム[5H572BB02]に分類される特許
21 - 40 / 122
モータ駆動装置
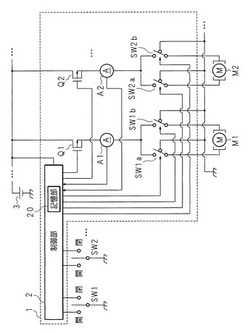
【課題】複数の開閉部が同時的に開閉された場合に、一の開閉部のみをロック状態にすることができ、更に他の開閉部に開閉を継続させることができるモータ駆動装置の提供。
【解決手段】制御部2は、モータM1,M2,・・・夫々についてロック状態であるか否かを判定する。複数のMOSFETQ1,Q2,・・・がオン状態であり、モータM1,M2,・・・の内、1つのモータ、例えばモータM1についてロック状態を検出した場合、モータM2,M3,・・・に係るMOSFETQ2,Q3,・・・の内、オン状態にあるスイッチを間欠的にオン/オフする。
(もっと読む)
作業機械の電液駆動システム

【課題】 作業機械の構造体を駆動する液圧モータと電動機とを備えさせるとともに、動力源で駆動する液圧ポンプと電動機とを備えさせて、液圧と電気とにより効率的な運転ができる作業機械の電液駆動システムを提供すること。
【解決手段】 作動油の流量をコントロール弁6で調整して上部旋回体16を駆動する作業機械の電油駆動システムを、エンジン2で駆動する油圧ポンプ4と第一電動機5とを有する電油ポンプ3と、前記電油ポンプ3から供給する作動油で回転させる油圧モータ10と第二電動機11とを有する電油モータ9とによって構成し、前記電油ポンプ3の負荷と前記電油モータ9の負荷とから、前記第一電動機5と前記第二電動機11の動作状態を決定する制御装置7を備えているようにする。
(もっと読む)
電動車両の駆動力制御装置
【課題】各モータの駆動状態を適切に保持しながら、目標とする車両運動を最大限に実現可能とする電動車両を提供すること。
【解決手段】複数の車輪107を独立して駆動する複数のモータ106と、駆動力指令値に基づいて各モータへの駆動電流を制御する複数のインバータ105とを備える電動車両の駆動力制御装置10において、各モータごとに算出した目標駆動力で駆動したとき、各モータを所望の動作範囲内で稼働できるか否かを判定する判定部12と、判定部で各モータを所望の動作範囲内で稼働できないと判定されたとき、各モータを所望の動作範囲内で稼働するために、各モータごとの目標駆動力及び各モータの稼働状態に基づいて各モータの駆動力配分を調整し、各モータごとの実際の駆動力指令値を算出する駆動力指令値算出部13と、複数のインバータに対して駆動力指令値をそれぞれ出力する指令値出力部14とを備える。
(もっと読む)
汲み上げポンプ及び汲み上げポンプの駆動方法
【課題】コスト的な無駄が非常に少なく、またエネルギの使用効率の高い(省エネ性の高い)運転のできる汲み上げポンプを得る。
【解決手段】駆動源Doと、該駆動源Doによって駆動されるインペラ軸16と、該インペラ軸16と共に回転することによって液状体をくみ上げるインペラ20と、を備えた汲み上げポンプ12において、前記駆動源Doとして、インペラ軸16と連結され起動時に先に起動される補助モータ(第1の駆動機)21と、インペラ軸16と連結され補助モータ21よりも後に起動される主モータ(第2の駆動機)22とを備え、起動後においても、補助モータ21と主モータ22の双方がインペラ軸16と連結されたまま該インペラ軸16を駆動する。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
サーボ制御装置およびモーションコントロールシステム
【課題】送受信の配置の衝突が繰り返される間、モーションコントロールシステム全体の初期化が遅延する。
【解決手段】第一の通信手段106はMDI結線、第二の通信手段107はMDI−X結線とすることで、通信ケーブル4としてストレートケーブルを選択した場合、主電源を入れ、夫々のサーボ制御装置1の電源が同時に入るとき、夫々のサーボ制御装置1同士の接続において、送受信ペアの衝突が発生しないようにすることが可能となる。
(もっと読む)
機械を駆動するサーボシステムの消費電力計算機能を有するサーボシステム選定装置
【課題】機械を駆動する複数のモータを駆動するモータ駆動装置を備えたサーボシステムの消費電力計算機能を有するサーボシステム選定装置を提供。
【解決手段】機械に使用されるモータと駆動アンプを備えたサーボシステムの選定を行うサーボシステム選定装置において、機械情報10、機械運転情報12、および選定対象となる少なくとも1つのサーボシステムのサーボシステム情報14を入力する入力部16と、入力部16に入力された機械運転情報12に基づいてサーボシステムの消費電力を機械情報10およびサーボシステム情報14を用いて、入力部16に入力されたサーボシステム毎に全消費電力量、全損失、あるいは電力効率の少なくとも一つを計算する演算部18と、演算部18により計算した全消費電力量、全損失、あるいは電力効率の少なくとも一つを入力部16に入力されたサーボシステム毎に表示または出力する第1の出力部20と、を備えた。
(もっと読む)
電動機駆動システム
【課題】複数台の交流電動機を1台の駆動装置(電力変換器)により駆動可能とし、かつ、巻線の巻き方が同じ固定子を使用可能としてシステム全体のコスト上昇を抑えると共に、横流の発生を抑制して銅損を低減させた電動機駆動システムを提供する。
【解決手段】n(nは2以上の整数)台の交流電動機を1台のインバータ400により駆動する電動機駆動システムにおいて、例えば、インバータ400の出力可能な電圧の1/2以下の端子電圧を印加可能な2台の交流電動機101,201をタンデム結合し、かつ、これらの交流電動機101,201の巻線を相ごとに直列に接続すると共に、誘起電圧の位相を一致させる。
(もっと読む)
位置決め制御装置および工作機械
【課題】位置決め制御装置においてスループットを低下させずにモータの発熱を抑える。
【解決手段】位置決め制御装置は、第1の被駆動部材を移動させる第1のモータ54と、第2の被駆動部材を移動させる第2のモータ64と、第1および第2のモータのそれぞれに対して2自由度制御を行い、第1の被駆動部材を第1の目標位置に移動させ、第2の被駆動部材を第2の目標位置に移動させる制御手段51,53,61,63とを有する。制御手段は、第1の被駆動部材を第1の目標位置に移動させるために第1のモータの動作に必要な第1の時間Txと、第2の被駆動部材を第2の目標位置に移動させるために第2のモータの動作に必要な第2の時間Tyとを求め、第1および第2の被駆動部材をそれぞれ第1および第2の目標位置に移動させる際に、第1および第2のモータを、第1および第2の時間のうち長い方の時間で同時に動作させる。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
電動シート駆動装置
【課題】電動シート駆動装置の小型化及び省電力化を図りつつ、より多くの調整部を要求に応じて動作させる。
【解決手段】電動シート駆動装置は、電動シートが備えるモータM1〜M3に電源側で接続された正転用電源側IPS40aと、モータM1〜M3に電源側で接続された逆転用電源側IPS40bと、モータM1〜M3毎に設けられ、モータM1〜M3に接地側で接続された正転用接地側IPS41a〜43aと、モータM1〜M3毎に設けられ、モータM1〜M3に接地側で接続された逆転用接地側IPS41b〜43bとを備えている。CPU3は、少なくとも1つの正転用接地側IPS41a〜43aと正転用電源側IPS40aとをオンしてモータM1〜M3に電源供給して正転させ、少なくとも1つの逆転用接地側IPS41b〜43bと逆転用電源側IPS40bとをオンしてモータM1〜M3に電源供給して逆転させる。
(もっと読む)
画像形成装置、モータ制御装置及びそのモータ制御方法
【課題】
本発明は、画像形成装置、モータ制御装置及びそのモータ制御方法に関し、複数のBLDCモータを効率的に駆動制御できる画像形成装置、モータ制御装置及びそのモータ制御方法を提供することにある。
【解決手段】
画像形成装置が開示される。本画像形成装置は、画像形成のジョブを行うのに使用されるエンジン部と、エンジン部の動作を制御するエンジン制御部と、エンジン部を起動させる複数のBLDCモータと、エンジン制御部から複数のBLDCモータに対するデジタル制御命令を受信する通信インターフェース部と、複数のBLDCモータの駆動情報を検知するセンサ部と、複数のBLDCモータを制御するための駆動信号を生成する駆動信号部と、受信されたデジタル制御命令及びセンサ部の検知結果に応じて前記駆動信号部の動作を制御する速度制御部と、を含む。
(もっと読む)
可動物体の位置を制御する方法、位置決め装置を制御する制御システム、およびリソグラフィ装置
【課題】さまざまなタイプのモータを同一の可動物体の作動のために使用でき、かつそのようなモータの使用による望ましくない効果を回避するアクチュエータ構成および制御を提供する。
【解決手段】少なくとも1つのリラクタンスモータを介して所定の自由度で変位可能な位置決め装置を制御する制御システムが、少なくとも1つの力感知素子と、リラクタンスモータによって加えられた力の量を感知する対応する力感知素子からの出力に基づいて、リラクタンスモータによって加えられた力の量を調整するコントローラとを含む。
(もっと読む)
電動機器と電動機器応用装置
【課題】軽量化が要求される蓄電池駆動の電動機器とそのエネルギー供給方法
【解決手段】動力源であるモーターの直近に、あるいは、励磁コイルの直近に蓄電池を配置し、エネルギー供給源から、動力機器や動力機器の励磁コイルへの配線を最短距離とすることで、軽量化とエネルギー損失の低減化を図る。
蓄電池を階層化して配備することでエネルギー供給源の信頼性を向上させる。
(もっと読む)
洗濯機のモータ駆動装置
【課題】モータを高速回転させる場合に必要となる昇圧電圧をより確実に発生できる洗濯機のモータ駆動装置を提供する。
【解決手段】制御回路42Bは、脱水運転を行う場合の制御パラメータであるドラムモータ5の回転数の変化に応じて、IGBT48により交流電源の電圧波形のゼロクロスタイミング間に全波整流回路45の入力端子間を短絡させる回数を変化させ、リアクトル44に蓄積された電磁エネルギーを有効に利用して、全波整流回路45より出力される直流電源電圧をより高く昇圧する。
(もっと読む)
負荷駆動システム
【課題】主電力変換器及び補助電力変換器に使用されるスイッチング素子の耐圧を等しくして素子の選定を容易にし、コストを低減する。
【解決手段】補助モータM1,M2を駆動する補助電力変換器Conv1,Conv2のうち少なくとも一部は電源電圧を昇圧してその直流中間回路に供給する昇圧機能を備え、前記直流中間回路を含む任意の正,負極間の直流中間回路に主電力変換器INVを接続して主モータMを駆動するシステムにおいて、主電力変換器INVの直流中間回路の両端を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の両端に接続し、主電力変換器INVの各相において直列接続された半導体スイッチング素子の個数を、補助電力変換器Conv1,Conv2の直流中間回路の直列回路の各相において直列接続されたスイッチング素子の個数と等しくする。
(もっと読む)
車載用電源装置
【課題】電気機器と電力の授受を行うにあたって、電気機器が低負荷状態、無負荷状態であっても、効果的に効率の低下を防止する車載用電源装置を得る。
【解決手段】制御装置5からのゲート制御信号6に従って変換主回路4内の半導体スイッチング素子をオン、オフさせて直流電源3と電気機器9の間を昇圧動作、降圧動作するにあたって、電圧変換器2の一次側電圧と電流、電圧変換器2の二次側電圧と電流、回転機巻線の電圧と電流、回転機15aの回転速度と回転機巻線の電流の四組の状態量情報に基づいて電力負荷量を算定し、電力負荷量に応じてゲート制御信号の周波数、ゲート制御信号の間欠による信号休止頻度を調整する。
(もっと読む)
電動機制御システム
【課題】運転領域に応じて損失を抑制することにより、電動機効率の向上を図る。
【解決手段】モータ10は、9相に対応する9つの巻線11を備え、個々の巻線11に供給される電流総和がゼロとなる3つの巻線がグループ化された3組の巻線グループを備える。そして、制御ユニット40は、モータ回転数およびトルク指令(負荷)に基づいて、2組の巻線グループを停止巻線グループとして選択し、この停止巻線グループへの通電を所定期間停止する。
(もっと読む)
プレス設備の電力供給装置及び方法
【課題】サーボプレスと機械プレスが混在するプレス設備全体の受電容量を小さくすることができる電力供給装置及び方法を提供する。
【解決手段】外部から電力を受電する受電装置81と、電力をサーボモータ21に適した直流又は交流に変換して供給するサーボプレス電力変換装置31と、電力を機械プレス40,60の駆動モータ41,61に適した直流又は交流に変換して供給する回生可能な機械プレス電力変換装置51,71と、受電装置81から電力変換装置31,51,71に電力を供給する交流リンク82と、機械プレス40,60及び機械プレス電力変換装置51,71を制御する電力制御装置100とを備える。電力制御装置100により、サーボプレス20が大電力を必要とするときに、機械プレス40,60のフライホィール42,62を減速させて電力を回生させ、回生された電力を交流リンク82を経由してサーボプレス20に供給する。
(もっと読む)
モータ駆動装置
【課題】クラッチや複合遊星歯車を使用せずに、2つのモータのロータ間の位相を変えることのできるモータ駆動装置を提供する。
【解決手段】2つのモータMa,Mbと、この各モータMa,Mbのモータ軸11a,11bの出力が伝達される出力軸20とを備え、一方のモータMaのティースに巻回された巻線と他方のモータMbのティースに巻回された巻線とが接続されたモータ駆動装置であって、一方のモータMaのロータRaと、他方のモータMbのロータRbとの間の位相を可変するロータ位相可変機構を設け、このロータ位相可変機構は、モータMaのモータ軸11aの出力を出力軸20に伝達するとともにロータRaの軸方向に移動可能な伝達部材30a,30bを有し、この伝達部材30a,30bは、軸方向の移動量に応じた量だけロータRa,Rbを回動させる。
(もっと読む)
21 - 40 / 122
[ Back to top ]