
Fターム[5H572PP01]の内容
Fターム[5H572PP01]に分類される特許
1 - 20 / 41
インクジェット記録装置およびモータ制御方法
【課題】複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置を提供する。
【解決手段】記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において、キャリッジを停止状態からインク吐出による記録時の目標速度まで加速する加速期間に、ファンの回転数を低下させるようにファンモータを制御する。
(もっと読む)
電動車両の制御装置

【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
駆動装置
【課題】 同一方向への回転途中に負荷の要求N−T特性が変動する駆動装置において、モータ出力を低減する。
【解決手段】 可変圧縮比エンジン80の偏芯カム66の負荷回転軸62を回転駆動する駆動装置601は、第1モータ11、第2モータ21およびダイオード式クラッチ50から構成される。第1モータ11のN−T特性は、第2モータ21の特性に対し低トルク高回転側に設定される。偏芯カム66の回転中、要求特性が低トルク高回転のときは第2モータ21が空転し、第1モータ11によって負荷回転軸62を回転駆動する。要求特性が高トルク低回転のときは第2モータ21の回転力が第1モータ11に伝達され、合成回転力によって負荷回転軸62を回転駆動する。これにより、駆動装置601のN−T特性を略反比例形の負荷要求特性に効率的に相応させることができるので、モータ出力を低減することができる。
(もっと読む)
モータ制御装置
【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ
【課題】2以上のモータが強制的に同期させられる場合において、各モータへの供給電流のアンバランスを抑制可能なモータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせを提供することである。
【解決手段】モータ制御システム1は、モータ内蔵ローラ2と、コントローラ(制御装置)6,7の組み合わせからなるものである。モータ内蔵ローラ2は、ローラ本体3とモータ4,5を有している。モータ4,5は、出力軸同士がローラ本体3で一体的に連結されており、モータ4,5は、強制的に同期運転するものである。モータ4,5の回転数に応じてコントローラ6,7から供給する電流パルスに下限が設定されている。
(もっと読む)
グラインダー用駆動装置及びそれを備えたグラインダー
【課題】簡単な手段によって安全性を高めたグラインダー用安全装置を提供する。
【解決手段】グラインダー用駆動装置8は次の特徴の内の1つ又は複数を有する:駆動手段は少なくとも3つの駆動装置を有すること;安全手段は、各駆動アセンブリ12の故障を検出するための故障検出手段28と、この故障検出手段28によって検出される故障に応答して全ての電動機14のスタートを妨げるに適した制御手段22を有すること;この故障検出手段28は、各減速手段16に1つの減速装置故障センサ34を有すること;少なくとも2つの駆動アセンブリ12、及び好ましくは全ての駆動アセンブリ12は同一であること;
(もっと読む)
回転電機制御装置
【課題】複数の交流回転電機のパルス幅変調のキャリアの波形を個別に変動させると共に、各キャリアと電流フィードバック制御の実行タイミングとを同期させ、且つ、所定の制御周期内で全ての交流回転電機の電流フィードバック制御を完了させる。
【解決手段】N個の交流回転電機の電流フィードバック制御は、重複することなく順次実行されて所定の制御周期TC内で完了される。各交流回転電機に対応するN個のキャリアCW1,CW2が、各基準区間TR1,TR2の長さを変動幅FRの範囲内でランダムに変動させて生成される。各キャリアCW1,CW2には、それぞれがN個の基準区間TR1,TR2を含むと共に、互いに開始タイミングが一致することがないように管理区間TM1,TM2が設定される。各キャリアCW1,CW2は、管理区間TM1,TM2のそれぞれの長さが制御周期TCに一致するように生成される。
(もっと読む)
回転電機制御装置
【課題】弱め界磁制御の限界点を超えた後も含め、幅広い駆動条件に対して、高い運転効率で回転電機を駆動制御する。
【解決手段】ロータと同速で回転する回転座標系に対応した電流指令を電流指令マップに基づいて決定する電流指令決定部は、電圧不足割合VRがゼロ以下の場合には、目標トルクに応じた等トルク線CTと基本制御線MTとの交点に電流指令を決定し、電圧不足割合VRがゼロ以上の場合には、目標トルクに応じた等トルク線CTに沿って電圧不足割合VRの増加に伴い限界トルク線LTへ向かう点に電流指令を決定し、電圧不足割合VRの増加により目標トルクに応じた等トルク線CTに沿った電流指令が限界トルク線LTに達した場合には、限界トルク線LTに沿って電圧不足割合VRの増加に伴い電圧制限楕円LVの中心へ向かう点に電流指令を決定する。
(もっと読む)
モータ制御システム
【課題】車両に搭載される同一定格出力の2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、第1及び第2モータ4a,4bの全体としての効率に基づいて予め設定された低トルク領域、中トルク領域及び高トルク領域の境界を示す境界トルクTx,Tyが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx,Tyとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が低トルク領域の場合には、第1モータ4aのみを駆動し、中トルク領域の場合には、第1モータ4aが最大トルクを出力する状態で第1及び第2モータを駆動し、高トルク領域の場合には、第1及び第2モータを同等に駆動する。
(もっと読む)
汲み上げポンプ及び汲み上げポンプの駆動方法
【課題】コスト的な無駄が非常に少なく、またエネルギの使用効率の高い(省エネ性の高い)運転のできる汲み上げポンプを得る。
【解決手段】駆動源Doと、該駆動源Doによって駆動されるインペラ軸16と、該インペラ軸16と共に回転することによって液状体をくみ上げるインペラ20と、を備えた汲み上げポンプ12において、前記駆動源Doとして、インペラ軸16と連結され起動時に先に起動される補助モータ(第1の駆動機)21と、インペラ軸16と連結され補助モータ21よりも後に起動される主モータ(第2の駆動機)22とを備え、起動後においても、補助モータ21と主モータ22の双方がインペラ軸16と連結されたまま該インペラ軸16を駆動する。
(もっと読む)
サーボ制御方法及びサーボ制御装置
【課題】被駆動物の位置により伝達関数が変化し、位相が急激に遅れて不安定になることにより、ゲインを上げることが困難となる現象を防ぐことが可能なサーボ制御系を提供する。
【解決手段】本発明の1実施例に係る方法は、一つの被駆動物を複数のモータで駆動する送り駆動機構に適用されるサーボ制御方法であって、各モータの速度フィードバックを混合した信号を用いて前記被駆動物の速度制御を行い、前記速度制御により得られたトルク指令を全てのモータの駆動に使用する。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】過電流を流すことなく、故障を検出できる電動機駆動装置およびこれを用いた電動パワーステアリング装置を提供する。
【解決手段】電動機駆動装置1の制御部50は、通常のPWM制御を開始する前に、端子電圧とPIG1電圧に基づいて、MOS21〜26自体のショート故障を検出する。MOS21〜26自体のショート故障が検出されなかった場合、MOS21〜26の少なくとも1つをオン制御した後、全てのMOS21〜26をオフ制御したときの端子電圧とPIG1電圧とに基づいて、MOS21〜26を非導通状態にできないプリドライバ52のショート故障を検出する。これにより、上MOS21〜23から対をなす下MOS24〜26に向かって電流が流れる経路が形成されないため、過電流を流すことなくプリドライバ52のショート故障を検出することができ、インバータの焼損を防止することができる。
(もっと読む)
バックラッシュ除去制御装置
【課題】加工時にはバックラッシュやロストモーションの発生を防止し、送り時には可動部材を高速送りする。
【解決手段】加工時には、2つのモータ11,21のうちの一方が可動部材GLを移動させるためのトルクを発生すると共に両モータ11,21が逆回転方向のオフセットトルクを発生することにより、バックラッシュやロストモーションの発生を防止する。送り時には、2つのモータ11,21可動部材GLを同方向に移動させるトルクを発生することにより、可動部材GLを高速移動動作させることができる。
(もっと読む)
拡張されたダイナミックレンジに亘ってトルクを迅速に発生させるための、低イナーシャを有する装置
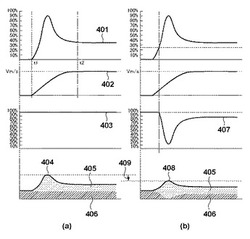
本発明は、トルク設定点に応じて出力部材(3)上にトルクを発生させるための装置に関し、装置は、出力部材が連結されるシャフト(2)を有する、第1動力の少なくとも一つのモーター(1)又は少なくとも一つの小モーターを含む第1モーターユニットと、結合手段(4)を介して出力部材に回転可能に連結されるシャフト(12)を有する、第1動力よりも高い第2動力の少なくとも一つのモーター(11)又は少なくとも一つの大モーターを含む第2モーターユニットと、サーボ制御手段(50)とを含み、サーボ制御手段(50)は、トルク設定点(Msp)に応じて、粘性結合手段が、トルク設定点に適合する粘性トルク(Mvisc)を提供するように第2モーターユニット(11)に動力を与え、且つ、これと並行して、第1モーターユニット(1)が、粘性トルクがトルク設定点の値に到達するまで、トルク設定点と粘性トルクとの間の付加トルクを生成するように第1モーターユニット(1)に動力を与えるべくプログラムされる。 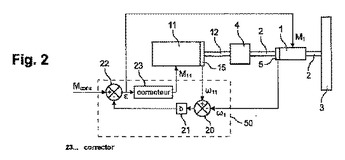 (もっと読む)
(もっと読む)
モータ駆動装置及び電動車両
【課題】電力変換器の出力可能な最大電圧を増加させ、弱め界磁電流を低減させて効率を向上させると共に、装置全体の低コスト化、小型化を図ったモータ駆動装置及び電動車両を提供する。
【解決手段】モータM1に交流電力を供給するインバータ3と、その正負直流母線間に接続された第1の電源としての鉛蓄電池1と、モータM1の中性点と直流母線の正極または負極との間に接続された第2の電源としての電気二重層キャパシタ2と、インバータ3の半導体スイッチング素子をオンオフ制御する制御回路30と、を備え、前記半導体スイッチング素子をオンオフ制御してキャパシタ2と正負直流母線との間でエネルギーを授受可能としたモータ駆動装置において、キャパシタ2の放電終止電圧を、正負直流母線間の電圧のほぼ1/2とする。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
アクチュエータ
【課題】簡素な制御により、迅速でスムーズな加減速により高速度化を実現できる、直線案内軸受装置などに用いられると好適なアクチュエータを提供する。
【解決手段】第1駆動モータ109を目標速度に追従する速度制御とし,第2駆動モータ110は、第1駆動モータ109の実際の速度に追従するような速度制御を行うことにより,相互の動作が干渉しない形で2つの駆動モータ109,110をともにフィードバック制御することが可能となる。さらに第2駆動モータ110の速度制御において、第1駆動モータ109の指令値をフィードフォワードとして加えることで,制御による位相遅れを少なくしている。これにより制御の応答性,減衰性が向上するという利点がある。
(もっと読む)
インバータ制御駆動装置およびそれを用いた掘削機
【課題】複数の汎用モータの各インバータの出力周波数を同じにしてもモータのすべりや駆動装置(ギア)のバックラッシュにより、汎用モータのモータ巻線に逆起電力が発生する。
【解決手段】2個の汎用モータ5a、5bを制御するインバータ8a、8bを、コンバータ部14a、14bと、該コンバータ部14a、14bからの出力電圧を平滑するコンデンサ部15a、15bと、該コンデンサ部15a、15bにより平滑された直流電圧を三相交流に変換する出力ブリッジ部16a、16bと、コンバータ部14a、14bとコンデンサ部15a、15bの間に直列接続された突入電流抑制抵抗部18a、18bと、該突入電流抑制抵抗部18a、18bに並列接続された第一スイッチ19a、19bと、を有し、第一スイッチ19a、19bは、コンデンサ部15a、15bのコンデンサ電圧が第一規定電圧に達すればONに切り替わる。
(もっと読む)
駆動装置及び駆動方法
【課題】 大きな負荷がかかる起動時には、低回転域でも大きな回転力が得られる流体モータを使用して楽に起動させると共に電動モータの焼損を回避させ、起動後は電動モータにより安定して通常運転させ、よって、電動モータの起動時に必要であったスターデルタやリアクトル抵抗器等の付帯設備を不要又は小さくしてコストの低減、制御盤のコンパクト化、マグネットスイッチの接点寿命の長期化、電源設備容量の低下によるランニングコストの低減等を図ることができる駆動技術の提供。
【解決手段】 ジョークラッシャー1の駆動軸50に連結された電動モータM1及び流体モータM2と、起動時は流体モータにより駆動軸を駆動させ、この駆動軸が設定回転数に上昇したのを検出すると、流体モータから電動モータに切り替えて駆動軸を駆動させるように制御する制御装置51と、を備えている。
(もっと読む)
1 - 20 / 41
[ Back to top ]