
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
61 - 80 / 139
移動端末装置、及び移動距離算出方法
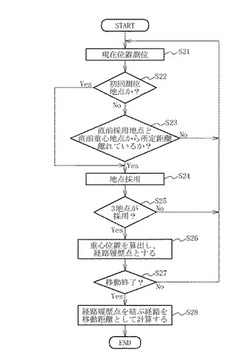
【課題】現在位置を測位することのできる装置において、移動距離を正確に測定することができるようにする装置及び方法を提供すること。
【解決手段】現在位置を測位するGPS受信手段12を備えた移動端末装置において、GPS受信手段12が測位した測位点を測位された順に所定条件で特定して処理対象地点とし、該処理対象地点が所定数に達する毎に該所定数の処理対象地点の重心を順次算出して経路履歴を示す経路履歴点とする重心算出手段13と、経路履歴点を順に結んだ経路から移動距離を算出する移動距離算出手段14と、を備え、重心算出手段13は、所定条件として、測位された順に測位点から次の測位点の距離を算出し、距離が所定距離だけ離れていない場合にはさらに次の測位点までの距離を算出し、距離が所定距離だけ離れている測位点を順次処理対象地点とすることを特徴とする。
(もっと読む)
移動量計測装置及び位置計測装置

【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
車両位置・方位修正方法及び車両位置・方位修正装置
【課題】GPS受信可能になってから短時間で車両位置、車両方位を正しい位置、方位に修正する車両位置・方位修正方法及び修正装置を提供する。
【解決手段】GPS受信機と自律航法センサーを併用するナビゲーションシステムにおいて、車両位置・方位修正部は、ナビゲーション制御停止時における車両位置と車両方位を保存し、これらをナビゲーション起動時における車両の初期位置と初期方位とする。そして、ナビゲーション起動後、自律航法センサーから得られるセンサー出力信号と、前記車両初期位置と初期方位とを用いて車両位置と方位を推測すると共に、GPS受信機より得られるGPS方位の信頼度が高くなったか監視する。GPS受信機より得られるGPS方位の信頼度が高くなったとき、車両位置・方位修正部は、該GPS方位と推測した車両位置を用いて車両の現在位置を修正する。
(もっと読む)
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法
【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
(もっと読む)
姿勢計測装置
【課題】本発明は、姿勢計測装置の装備場所の適否に起因して生じる障害物による電波遮断による測位信号の捕捉OFFか、または姿勢計測装置の装備状態の適否に起因する振動、衝撃などに起因する捕捉OFFかを分離して判定できる情報を提供することを目的とする。
【解決手段】本発明にかかわる姿勢計測装置は、移動体の姿勢及び方位を計測する姿勢計測装置において、受信不能となった測位衛星の方向に基づいて決められた遮断領域の情報と、慣性センサの異常信号の発生情報とに基づいて、姿勢計測装置の装備場所、装備状態の適否を分離して判定できる技術を提供する。
(もっと読む)
位置検出装置、それにおける位置の検出をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】GPSの使用が困難な場所でも位置および方位・傾きを検出可能な位置検出装置を提供する。
【解決手段】位置検出手段2は、カメラ1が撮影した2次元バーコードの画像Gを2次元バーコードを正面から正対して見たときの画像に補正して2次元バーコードに対するカメラ1の配置方向に関する方向情報を検出する。また、位置検出手段2は、補正した画像に基づいて、2次元バーコードに記録された2次元バーコードの位置情報および実際のサイズを読み出すとともに、画像のサイズを検出する。そして、位置検出手段2は、実際のサイズと画像のサイズとのサイズ比を演算し、記憶手段4からサイズ比と距離との対応関係を示す対応表を読み出し、その読み出した対応表を参照して、演算したサイズ比に対応する距離を検出する。その後、位置検出手段2は、位置情報、方向情報および距離に基づいて、カメラ1の位置を検出する。
(もっと読む)
鉄道航法システム
【課題】鉄道航法システムにおいて、高度情報データベース等を利用することなく取得した3次元情報を鉄道車両の運行管理に効果的に活用すること。
【解決手段】鉄道車両に搭載され、線路上を走行する鉄道車両のための鉄道航法システムであって、人工衛星からの電波を受信することにより現在位置の緯度、経度および高度を含む3次元位置情報を測位するGPS受信器21と、GPS受信器21が検出した高度情報に基づき、線路4上の一の地点と、線路4上の他の地点との間の勾配値を演算する演算部22と、演算部22が演算した勾配値を3次元位置情報に関連づけて表示する表示部14と、を備える。
(もっと読む)
マルチパス検出装置、測位装置、姿勢方位標定装置、マルチパス検出方法およびマルチパス検出プログラム
【課題】マルチパスの影響が無い搬送波の観測情報に基づいて高精度に位置および姿勢角を標定することを目的とする。
【解決手段】位相差算出部130は各GPS衛星と各GPSアンテナ951との距離を搬送波の数で示す各搬送波位相に基づいて各GPS衛星からの搬送波についてGPSアンテナ951間の搬送波位相の一重差または二重差を算出する。LOSベクトル算出部140は航法メッセージと単独測位結果とに基づいて各GPS衛星に対するLOSベクトルを算出する。基線長算出部150は搬送波位相の一重差または二重差とLOSベクトルとに基づいてGPSアンテナ951間の基線長を算出する。マルチパス判定部160は算出した観測基線長を既知基線長と比較して観測基線長の算出に用いられた各搬送波にマルチパス波が含まれているか判定する。位置姿勢方位標定部120はマルチパス波でない搬送波の観測情報に基づいて位置姿勢を標定する。
(もっと読む)
車両移動データ解析システム
【課題】オフラインではあるが、位置検出精度が向上するDGPS方式を利用した新しい応用の提供。
【解決手段】車両11に搭載され移動データを収集する移動データ収集部10と、移動データと通信回線を介してGPS基準局から取得した補正情報とに基づいて移動データを処理して補正移動データを生成する移動データ処理部21と、を備える車両移動データ解析システムであって、移動データ収集部10は、GPS装置12,13と、移動データを記憶する記憶装置15と、前方の画像を記録するドライブレコーダ16,17と、を備え、移動データ処理部21は、移動データを補正情報に基づいて補正し、車両の加速度を含む移動情報を出力するGPS処理部22と、地図データ記憶部25と、表示部27と、を備え、表示部に地図上の移動経路と速度及び加速度とドライブレコーダの記憶した画像とを表示する。
(もっと読む)
可搬型GPS受信装置及び移動体の移動分析診断システム
【解決手段】GPS受信情報に基づいて当該移動体の位置・時刻のデータが記憶された記憶装置23から、位置・時刻のデータを読み出して、速度、加速度を算出し、当該移動体の利用者である運転者の運転特性に関する診断指標を生成して出力する。
【効果】可搬型GPS受信装置単独で、GPS受信情報の収集・蓄積から診断指標生成処理、出力に至る全ての処理を行うことで、利用者の移動特性に関する評価診断指標をいつでもどこでも見ることができるようになる。
(もっと読む)
列車位置異常検知システム
【課題】 大掛かりな設備を必要とせず、かつ簡単な制御でGPS受信機による位置情報の異常を検知することのできる列車位置異常検知システムを提供する。
【解決手段】 列車1に搭載されGPS衛星2からの信号を受信するGPS受信機3と、GPS受信機3から出力される速度またはこの速度から計算された加減速度と列車性能データベース5に格納された列車1の最大速度または最大加減速度とを比較して、GPS受信情報の異常を判定する列車位置異常検知装置4と、を備えている。
(もっと読む)
周波数間バイアス推定装置及び周波数間バイアス推定方法
【課題】衛星に起因する周波数間バイアス及び受信機に起因する周波数間バイアスを精度よく推定する。
【解決手段】1以上の受信機24の各々から複数の測位衛星10a、10b、10cの各々に対する擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部と、乱数を発生させる乱数発生部と、総電子数と総電子数モデル値に基づき周波数間バイアスを算出し、乱数に基づき周波数間バイアスが有する受信機依存周波数間バイアスと衛星依存周波数間バイアスとを仮に決定し、予め測量された位置に基づく位置情報と、位置を測位して得られた位置情報との誤差が最も小さい場合に、仮に決定された受信機依存周波数間バイアスと衛星依存周波数間バイアスとを真の値であると推定する周波数間バイアス推定部とを備える。
(もっと読む)
津波・波浪観測設備
【課題】海底に係留された係留ブイの係留索が伸長限にあっても、波の入射波高を正確に計測することができる。
【解決手段】海底に固定された第1係留索13を介して所定海域に係留された第1係留ブイ14と、第1係留ブイ14に第2係留索15を介して係留された第2係留ブイ16とを具備し、第2係留ブイ16に当該第2係留ブイ16の変位を検出可能な海面変位検出部42を設けた。
(もっと読む)
測距装置及び測位装置並びに測距方法及び測位方法
【課題】MMTは、受信信号が直接波1波とマルチパス1波とからなる場合において、マルチパスの影響を低減できる。しかしながら、実際の環境において、マルチパス波の数は1波とは限らない。受信信号に複数のマルチパス波が含まれている場合には、マルチパスの影響を除去しきれない。反対にマルチパス波が含まれない場合には、直接波1波を直接波1波とマルチパス1波として推定してしまうため、誤差を生じてしまう。また、時間領域信号を対象に最尤推定を行うことは計算上の困難を伴う。
【解決手段】本発明に係る測位装置は、周波数領域での最尤推定により信号モデルのパラメータを推定し、情報量基準により信号モデルを推定することによって、マルチパス誤差を抑制する。
(もっと読む)
移動体姿勢計測装置
【課題】手間暇をかけることなく、移動体の姿勢の計算の精度を向上させる。
【解決手段】 姿勢算出部13は、記憶部12に記憶している各アンテナの相対的位置関係から船体の姿勢を算出する。位置関係算出部14は、基準アンテナから見た各アンテナの相対的位置関係を算出する。座標系変換部15は、位置関係算出部14で算出した各アンテナの相対的位置関係を移動体座標系に変換する。補正部16は、移動体座標系に変換後の各アンテナの相対的位置関係についてフィルタリングにより誤差を補正する。更新部17は、記憶部12に記憶されている各アンテナの相対的位置関係を補正後の各アンテナの相対的位置関係により更新する。
(もっと読む)
エフェメリスを延長するための予測値更新方法
【課題】 GNSS受信機及びシステムにおいて、エフェメリスデータを使用するためのシステム、方法及び装置を提供する。
【解決手段】 悪い受信状態の下で、より長い間エフェメリスを使用可能とするために合成エフェメリスデータを使用する受信機を、劣化した合成エフェメリス情報に対して正確な情報を移入することが可能な様々な手法を用いて更新するものである。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
アレイアンテナシステム
【課題】特定の場所に設置しなくても、電波の到来する方位および仰角を推定することができるアレイアンテナシステムを提供する。
【解決手段】信号処理装置2は、アンテナ群1に属する互いに独立して移動可能な複数のアンテナ部1a〜1nで受信した電波に輻輳された複数の信号を独立成分分析の手法を用いて分離し、分離された複数の信号の各々についての各アンテナ部1a〜1nにおける位相差を算出し、衛星信号を用いた各アンテナ部1a〜1nの測位結果により各アンテナ部1a〜1nの位置関係を算出し、この算出した位相差および位置関係を用いて、電波の到来方位および仰角を算出する。
(もっと読む)
電離層電子密度算出装置
【課題】電離層の状態に即して、電離層中の所望の位置における電子密度を算出することができる電離層電子密度算出装置を提供する。
【解決手段】衛星観測部1は衛星信号を観測し、衛星信号の通過経路における総電子数(TEC)を、観測した衛星信号から求める。演算部42は、衛星観測部1で算出した衛星信号の通過経路における総電子数と、電離層電子密度分布モデルから求めた衛星信号の通過経路における総電子数との差分を算出し、この差分を用いて、電子密度の値を修正するための係数αを算出し、電離層電子密度分布モデルを用いて算出した所望の位置の電子密度に係数αを乗算して修正電子密度を算出する。
(もっと読む)
電離層電子密度算出装置
【課題】電離層の状態に即して、電離層中の所望の位置における電子密度を算出することができる電離層電子密度算出装置を提供する。
【解決手段】放送信号をアレイアンテナ41で受信すると、演算部45は、受信信号から求めた到来方位角、到来仰角と、電離層電子密度分布モデルにより算出した放送信号の伝搬経路から求めた到来方位角、到来仰角との誤差を求める。衛星観測部1は観測した衛星信号からその通過経路における総電子数を求める。演算部45は、衛星観測部1で求めた衛星信号の通過経路の総電子数と、電離層電子密度分布モデルから求めた衛星信号の通過経路における総電子数との誤差を求める。演算部45は、電離層電子密度分布モデルに入力するパラメータを、初期値からモンテカルロ法的な手法により修正し、逐次誤差指標を算出し、誤差指標が所定の閾値以下になった際のパラメータを用い、所望の位置の電子密度を算出する。
(もっと読む)
61 - 80 / 139
[ Back to top ]