
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
81 - 100 / 139
データ取得装置及びデータ取得方法

【課題】使用者の現在地における高度や方位等の正確な地学的データを取得可能とする。
【解決手段】高度計測時には、圧力センサ15を用いて計測した第1の高度データを、GPS処理部3で受信した測位情報に基づき計測した第2の高度データによって補正し、最終的な高度データとする。また、磁気センサ14を用いて計測した磁北の方向と、GPS処理部3で受信した測位情報に基づき計測した磁北の方向との角度差を補正角データとしてRAM7に記憶しておき、方位計測時には、磁気センサ14を用いて計測した磁北の方向を補正角データによって補正し、最終的な方位データとする。
(もっと読む)
車載用ナビゲーション装置及び車両進行方向検出方法

【課題】バック信号を取得するためのアダプタ等の特別なハードウェアを必要とせずに、バック信号を取得できない場合であっても自車の進行方向を正しく判定可能とし、自車位置精度の向上に寄与することができる「車載用ナビゲーション装置及び車両進行方向検出方法」を提供すること。
【解決手段】衛星航法及び自立航法を利用した各測位機能を併用して自車位置を決定する車載用ナビゲーション装置において、自立航法による測位機能に基づき検出した車速と、衛星航法による測位機能に基づき検出したGPS方位をモニタし、該車速がしきい値以上になったときに自車は「前進」していると判定し(S3,S4)、該車速がしきい値未満でGPS方位の変化量がしきい値以上になったときに、自車は「前進」から「後進」に、あるいはその逆の状態に切り替えられたものと判定する(S6,S7)。
(もっと読む)
車両走行動揺/騒音解析システム、車両走行動揺/騒音解析方法、車両走行騒音解析システムおよび車両走行騒音解析方法
【課題】鉄道車両の走行試験において動揺測定値および/または車内騒音測定値を高い位置精度または距離精度で正確に得ることができ、しかも計測者に負担をかけることなく、低コストで試験を行うことができる車両走行動揺/騒音解析システムを提供する。
【解決手段】軌道上を走行する車両の前後方向、左右方向および上下方向の振動加速度を検出する3軸加速度センサー11と騒音計12とGPSアンテナ13およびGPS受信機14とを車両に設置し、GPSアンテナ13によりGPS受信機14が受信する信号により取得される位置情報と3軸加速度センサー11により検出される車両の前後方向の加速度とに基づいて車両の位置情報を補正するとともに、車両が駅に停止している時に計測者により入力される駅停止信号および/または車両が構造物を通過する時に計測者により入力される構造物信号により車両の位置情報を補正する。
(もっと読む)
GPS距離測定装置
【課題】所望する2点間の距離を容易に測定することができるGPS距離測定装置を実現する。
【解決手段】GPS距離測定装置1は、ユーザが所望する距離測定に応じた測定開始点と測定終了点とを現在位置指示部5aによりそれぞれ指し示した状態で操作ボタン6が操作されて、その測定開始点と測定終了点とを指定することによって、その測定開始点と測定終了点とがそれぞれ指定されたタイミングに対応し、GPSセンサ5により受信されたGPS信号に基づく位置データをそれぞれ取得することができ、その取得したGPS信号に基づく測定開始点に関する位置データと、測定終了点に関する位置データとに基づいて、測定開始点と測定終了点の間の距離を算出して表示パネル4に表示する。
(もっと読む)
室内GPSを用いて隙間埋めパッドの取付位置及び厚さを計算する方法及び装置
【課題】平面度を精密に測定し、隙間埋めパッドの取付位置及び厚さを計算するために用いられる入力データとして平面度検出結果を入力する時間を短縮し、それによって作業時間を短縮する。
【解決手段】部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する方法であって、部材の設計中に予め計算されている平面度計測点に関する情報を統合管理サーバから受信する第1ステップと、部材上の受信した平面度測定点の各々における3次元座標を計算する第2ステップと、計算した3次元座標に基づいて、部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する第3ステップとを含み、第2ステップが、平面度測定点の各々において部材に室内GPSセンサを接触させるステップと、部材上に設置されている別の室内GPSを用いることによって、部材と接触している室内GPSセンサの端部における3次元座標を計算するステップとを含む方法が提供される。
(もっと読む)
移動体姿勢計測装置
【課題】従来に比べて移動体の姿勢の計算が簡易なものとし、また、移動体の姿勢の算出値の精度を向上させる。
【解決手段】移動体に設けられて衛星の信号を受信する基準アンテナ11及びn個(1,2,3,…)のユーザアンテナ12で受信した衛星の信号から前動体と前記衛星との位置関係を算出する。また、各アンテナで受信した衛星信号の搬送波位相を測定する。そして、この搬送波位相から一重位相差又は二重位相差を計算する。基準アンテナとユーザアンテナとの位置関係、移動体と衛星との位置関係、及び一重位相差又は二重位相差の関係に基づいて、一重位相差又は二重位相差に対する未知の整数値アンビギュイティ、移動体の未知の姿勢成分、及び一重位相差又は二重位相差についての初期値を算出する。非線形推定法を利用して初期値を収束させることにより、未知の整数値アンビギュイティ及び移動体の未知の姿勢成分を算出する。
(もっと読む)
位置を推定する方法及び関連する装置
方法は、慣性位置情報、GPS情報、及び測距情報を、位置推定装置を使って受け取ることを含む。この方法は、慣性位置情報、GPS情報、及び測距情報の組み合わせに基づいて、位置推定装置の位置の推定を判断する。 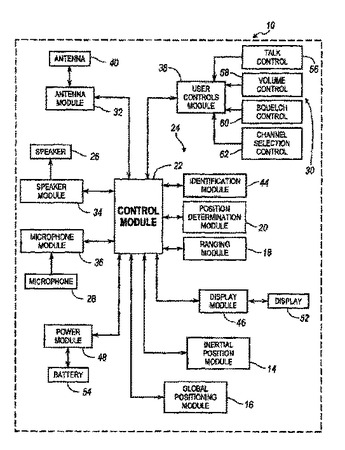 (もっと読む)
(もっと読む)
方位補正装置、方位補正方法、方位補正プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】方位誤差の蓄積を防ぐとともに、方位補正の最適化を図ること。
【解決手段】検知部301は、移動体が直進していることを検知し、検出部302は、検知部301によって直進を検知した場合、移動体の移動方向に関する移動方位を検出する。また、算出部303は、検知部301によって直進を検知した場合、移動体の周辺道路の敷設方向に関する道路方位を算出する。そして、比較部304は、検出部302によって検出された移動方位と、算出部303によって算出された道路方位とを比較して、補正部307は、比較部304によって比較された結果に基づいて、移動方位を補正する。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
車両の方向特定方法,および,車両方向特定装置。
【課題】局所測地座標における車両の向きを特定すること
【解決手段】GPSアンテナ10それぞれが車両の前後方向に沿って配置されていることから、これらGPSアンテナ10の位置それぞれをつなぐ直線に基づいて、車両の前後方向に沿った軸の向きを特定することができる。また、GPS信号からは、周知のように高い精度で速度ベクトルを特定できるため、そのような精度の高い速度ベクトルに基づいて上述のように位置を特定することは、結果的に精度よくGPSアンテナ10の位置および車両の向きを特定できる。
(もっと読む)
携帯型ナビゲーション装置及びナビゲーションプログラム
【課題】GPS信号から正しく方位情報を受信できない場合においても、自動的に精度の良い方位情報を取得しナビゲーションを行うことが可能な携帯型ナビゲーション装置を提供する。
【解決手段】仮想COMソフトウエア27は、GPSチップ21から入力したNMEAメッセージを解析し、NMEAメッセージ内の方位情報が正確であるか否かを判定する。正確であると判定した場合には、仮想COMソフトウエア27はNMEAメッセージをそのまま地図ナビゲーションアプリケーション28に出力する。一方、正確でないと判定した場合には、仮想COMソフトウエア27はNMEAメッセージ内の方位情報を地磁気センサ23で検出した方位情報に置き換えた上で、地図ナビゲーションアプリケーション28に出力する。
(もっと読む)
姿勢算出装置、および、姿勢算出方法
【課題】予備のGPSを含めた3台以上のGPS受信機を有し、各々のGPS受信機のアンテナから位置情報を受信し、受信した位置情報から物体の姿勢を算出する姿勢算出装置で、高精度の姿勢算出をおこなう。
【解決手段】3台以上のGPS受信機から姿勢を算出するGPS受信機の組合せを、予め固定で決めることなく、GPS受信機のアンテナ間の基線長が長い組合せを常時監視する。そして、各々のGPS受信機の組合せからアンテナ間の基線長が最も長い2台のGPS受信機を選択し、その2台から出力される情報情報を姿勢算出に用いる。
(もっと読む)
自車位置決定装置
【課題】自律航法では誤差が大きく、GPSデータが信頼できるときには、素早くGPSデータを利用して正確な自車位置を得ることができる「自車位置決定装置」とする。
【解決手段】GPS受信信号により自車両の位置と進行角を検出するGPS位置進行角検出部と、ジャイロと車速データにより自車両の位置と進行方位を検出する自律航法位置方位検出部と、GPS位置進行角検出部と自律航法位置方位検出部により自車両の位置と進行方位を決定する自車位置方位決定部と、自車位置方位決定部で決定した自車両の位置を地図の道路に一致させるマップマッチング部と、GPS位置進行角検出部で検出したデータの信頼性を判定するGPS信頼度判定部とを備え、自車位置方位決定部では、マップマッチング処理が行われないとき、GPS信頼度判定部でGPSデータに信頼性があると判定したときには、GPS位置と進行角により自車両の位置と進行方位を決定する。
(もっと読む)
衛星測位システムによる物体の変位抽出方法
【課題】測位データを受け取ることができない場合でもフィルタ処理を可能にし得る衛星測位システムによる物体の変位抽出方法を提供する。
【解決手段】RTK方式による高精度なGPS測位データにより津波などの周期性変位を抽出する方法であって、GPS受信機からの測位データが監視施設に届かなかったときに、そのデータの欠落部分に、届かなくなる直前の所定の計測時間における高精度なデータの平均値を用いて、データの補完を行うことにより、測位データの連続性を維持させる方法である。
(もっと読む)
スパーブイによる海象計測方法およびその装置
【解決手段】スパーブイの上部に搭載したGPS式の運動計測センサ2でスパーブイ上部の動揺による運動変位を3次元位置データとして時系列に計測し、時系列で得られたこの3次元位置データに基づいて波によるスパーブイの縦揺れ振幅角φと運動周期Twを求める。得られたスパーブイの縦揺れ振幅角φと運動周期Twの数値から波高Hwの近似値を求め、その数値をもって海洋波の波高を推定する。近似値の求め方として、あらかじめ作成しておいた運動特性テーブルのテーブルルックアップによる補間計算法を用いる。
【効果】GPS測位データに基づいたリアルタイムな海象情報を極めて簡単に、かつ、精度良く安定して得ることができる。既存のスパーブイに従来から用いられている運動計測センサ2を容易に後付けすることができ、コスト面でも大きなメリットがある。
(もっと読む)
測位用信号受信装置
【課題】安価な移動体検出機能を備えた測位用信号受信装置を提供する。
【解決手段】測位用信号受信装置10において、測位用アンテナ12は、測位用衛星からの測位用信号を受信する。局部発振器26は、局部発振信号を生成する。検出用アンテナ34は、局部発振信号を放射するとともに、放射された局部発振信号の反射信号を受信する。ミキサ回路16は、入力された信号と局部発振信号とを混合することにより中間周波信号を生成する。測位用アンテナ電源制御部44、スイッチ制御部46は、ミキサ回路16へ入力される信号を、測位用信号と反射信号とで切り替える。位置算出部48は、ミキサ回路16に測位用信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10の位置を求める。移動体検出部50は、ミキサ回路16に反射信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10付近の移動体を検出する。
(もっと読む)
位置・姿勢推定装置
【課題】本発明の課題は、複数アンテナを使用するGNSS位置・姿勢推定装置において、装置を複雑化することなく、マルチパス誤差を軽減することにより、姿勢推定精度および位置推定精度を向上させることにある。
【解決手段】本発明の姿勢推定装置は、移動体上に複数のアンテナを搭載し、各アンテナで取得したGNSS衛星信号と装置内部で生成したレプリカ信号の相関をとる相関器において、姿勢角情報を用いて次式で計算した搬送波位相差を拘束条件として課する機能を備え、更に、従来のGNSS姿勢推定装置の機能により得られた姿勢角を初期値とし、前記の拘束条件を有する相関器を用いることにより搬送波位相のマルチパス誤差を軽減し、各アンテナにおける搬送波位相を推定して姿勢角を再度計算する手段を備えるようにした。
(もっと読む)
位置ベースの通信制御システム
少なくとも一部において、通信端末間の距離に基づいて通信端末間の通信を制限する通信システムが開示される。第1の通信チャネルは、送信機を含む第1の通信端末に接続される。第2の通信チャネルは、受信機を含む第2の通信端末に接続される。距離決定機能が、第1の通信端末と第2の通信端末との間の距離を認識する。距離スケルチが距離を分析し、受信機によってメッセージを用いられることを阻止する。 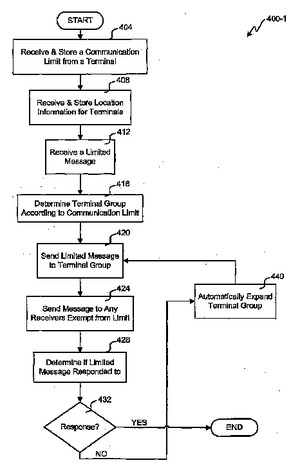 (もっと読む)
(もっと読む)
車載用走行距離計測装置
【課題】構造が簡単で、装置の製造コストを低く抑えることができ、計測誤差を最小限に留めることのできる車載用走行距離計測装置を提供する。
【解決手段】GPS衛星からの電波を受信し、車両の瞬間速度を算出するGPS受信部2と、GPS受信部で算出した車両の瞬間速度を所定の時間間隔毎に記録する記録部4と、記録部が記録した瞬間速度と所定の時間とに基づいて、車両の走行距離を算出する距離演算部(制御部3)とを備える車載用走行距離計測装置1。GPS衛星からの電波を利用して算出した車両の瞬間速度を用い、GPS衛星から電波が得られる時間間隔との積によって車両の走行距離を算出する。この装置1の機能を利用し、車両の平均燃費と、燃料タンクの容量を含む車両情報を入力部5から入力し、制御部によって走行可能距離を算出し、所定の値以下になると警報部6から警報を発することもできる。
(もっと読む)
移動体の横滑り計測装置
【課題】
本発明は、移動体の横滑りを高精度に計測する装置に関するものである。
【解決手段】移動体の横滑り角は、移動体上の前後に取り付けられた測位用衛星受信アンテナで受信した信号から算出する後のアンテナに対する前のアンテナの方向(前方方向)とアンテナの進行方方向から算出する。
(もっと読む)
81 - 100 / 139
[ Back to top ]