
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
121 - 139 / 139
航空機位置検知装置及びその方法
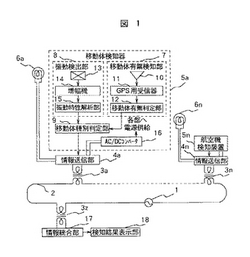
【課題】安価な装置で確実に航空機の位置を検知できる航空機位置検知装置を提供することにある。
【解決手段】GPS信号を受信するアンテナ10と、GPS信号の受信強度に基づいて移動体の存在を検知する移動体有無検知部7と、移動体から発せられる振動を検知する振動センサ13と、振動信号に基づいて移動体が航空機であると判定する移動体種別判定部9を備える。
(もっと読む)
潮位監視システム,潮位監視システム用の海上ブイ及び地上局装置、潮位監視方法、潮位監視プログラム

【課題】 所定の海域における海面の上下動を検出し、その解析により津波,高潮等の潮位異常を検出するようにした潮位監視装置,潮位監視方法及び潮位監視プログラムを提供する。
【解決手段】 所定海域の海面上に分散配置してアンカーにより係留され、海面高さを測定する測定部と、この測定部で測定された測定値を測定時刻と共に送信する通信部と、を有する複数個の海上ブイ100と、地上の所定箇所に配置され、各海上ブイの通信部から送信されてくる測定値及び測定時刻を受信する通信制御部と、上記通信制御部で受信した各海上ブイからの測定値及び測定時刻に基づいて、上記所定の海域における海面の上下動を解析し、潮位の異常を検出すると共に、各海上ブイの位置情報を参照して、潮位の異常の移動方向及び移動速度を算出する潮位解析部と、を有する地上局装置200と、を設ける。
(もっと読む)
物体の方位および姿勢検出装置
【課題】 フレームを用いて複数のアンテナをユニット化する必要がなく、複数のアンテナを水平面上に設置しなければならないといった設置条件を無くし、さらに通常の運用状態で短時間のうちに起動して物体の方位および姿勢を求められるようにする。
【解決手段】 船舶1の所定位置にアンテナA0,A1,A2を設置した後の初期処理で、基準アンテナA0に対する他のアンテナA1,A2の相対位置をRTK法により求めるとともに、基準アンテナA0に対するアンテナA1,A2までの距離をアンテナの配置関係として求めて保存する。その後の通常処理では、RTKなどによる相対測位によりアンテナA0,A1,A2の相対位置関係を求め、この相対位置とアンテナの配置関係に基づいて船舶の方位角および姿勢角を算出する。
(もっと読む)
携帯情報端末及び高度測定システム
【課題】 地図情報及びGPSの位置情報から求められる高度情報でもって、気圧を利用した高度計端末の気圧・高度換算テーブルを補正することができる小型・軽量化が可能な高度測定システム及び携帯電話端末を提供する。
【解決手段】 通常動作時において、CPU12は、気圧検出部14が検出する気圧値と、換算テーブル(気圧・高度換算テーブル)とを照合することにより、携帯電話端末1の現在位置の高度を求める。また、換算テーブルの補正時には、CPU12は、RF部11を介してGPS情報により携帯電話端末1の現在位置を算出し、地図サーバ2が提供する地図情報から携帯電話端末1の高度情報及び気圧検出部14が検出する気圧値とを用いて、換算テーブルを補正する。
(もっと読む)
移動体姿勢検出装置
【課題】 測位可能な、天頂に近い2つ程度の少ない数の測位衛星からしか電波が届かないような場所であっても移動体の絶対的な姿勢を検出することができる移動体姿勢検出装置を提供する。
【解決手段】 複数の受信要素1−1〜1−3を配置してなるアンテナ1と、アンテナ1の受信要素又は移動体の位置若しくはこれを近似する概略の位置に関する情報に基づき求められる位置から測位衛星への視線方向を規定する衛星方向情報を求める衛星方向獲得手段2と、少なくとも2つの測位衛星から受信した航法電波について受信要素間の位相差をそれぞれ求め、これら位相差及び衛星方向情報に基づいて測位衛星からの航法電波を受信している少なくとも一対の受信要素の組み合わせの基線ベクトルを検出する基線ベクトル検出手段3と、基線ベクトルにより規定される姿勢を移動体の姿勢として算出する姿勢演算手段4とを備える。
(もっと読む)
距離計測システム及び、計測方向制御方法
【課題】 測定対象物に向ける計測方向を自動制御することのできる距離計測システム等を提供する。
【解決手段】 移動無線機10が測定点に配置された状態で、固定無線機20(20a,20b)は、無線通信により、移動無線機10との距離を算定する。制御コンソール30は、算定された距離(距離データ)を固定無線機20(20a,20b)から取得すると、この距離データ及び、固定無線機20(20a,20b)の位置等から、移動無線機10の位置を特定する。そして、制御コンソール30は、特定した移動無線機10の位置に基づいて、基準線を基準とした移動無線機10までの角度を求め、この角度情報を光波距離測定機40に供給することで、移動無線機10の位置に、計測方向が向くように、光波距離測定機40を回動制御する。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 本発明は、移動体の走行状態に応じて精度良く移動体の位置の算出をすることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位衛星からの受信電波を受信するRF受信部12と、受信された信号から移動体の速度および角速度データを測位する測位演算部14と、速度と角速度の関係を規定する角度予測関数に基づき角速度の予測範囲を設定する予測範囲設定部16と、測位された角速度データが予測範囲内にあるか否かを判定し、角速度データが予測範囲外の場合には、角速度データが予測範囲内となるように角速度データを補正する測位データ補正部20と、移動体の走行状態を判定し、当該判定結果に応じて予測範囲設定部16による角度予測関数の選択を制御する予測範囲可変部18とを含んで構成される。
(もっと読む)
高さ情報を生成する衛星ナビゲーションシステム
車両用の衛星ナビゲーションシステム(100)が、車両が位置する地理的位置の標準高さ情報の生成機能を備える。このシステム(100)は、ナビゲーション衛星からの受信信号の関数として位置データを生成できる衛星受信器(110)を有し得る。この位置データは、軽度、緯度、および楕円高さの情報を有し得る。このシステム(100)は、起伏グリッドモデル(146)またはデジタル地図(142)中のある地理的範囲に対して起伏値を記憶し得る。このシステム(100)は、その位置の近似起伏値を決定し、その位置の標準高度値を計算し得る。 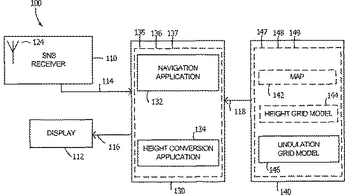 (もっと読む)
(もっと読む)
通信システム
【課題】ICカードの不正使用の防止及び、取り忘れや盗難を報知する。
【解決手段】利用者の識別情報が記録されたICカード1をICカードリーダ2を介して情報端末3で読み取り、ネットワーク接続されたサーバ装置6で認証を行う際に、利用者が情報の入力を行う情報端末3の位置情報と、利用者の携帯通信端末7の位置情報とを取得し、両者の距離が所定の距離以上の場合に情報端末3への情報の入力を不可とする。また、ICカード1がICカードリーダ2に挿入あるいは載置されており、両者の距離が所定の距離以上の場合に携帯通信端末7へカード取り忘れを報知する。また、ICカード1がICカードリーダ2から取り除かれており、両者の距離が所定の距離以上の場合に携帯通信端末7へカード盗難を報知する。
(もっと読む)
携帯電話機、携帯電話機の方位検出方法及び携帯電話システム
【課題】携帯電話機をどこに持ち運んでも、常に正確に真北と携帯電話機画面の向きの関係を知ることができる。
【解決手段】コンパス11は携帯電話機1の磁北の水平成分に対する角度を出力する。通信ネットワーク2は各エリアの偏角情報を保持し携帯電話機1に送信する。通信用CPU12は偏角情報14を通信ネットワーク2から受信し、アプリケーション用CPU13に渡す。アプリケーション用CPU13は、偏角情報14とコンパス11が出力する電話機画面の向き15を足し合わせ、真北に対する電話機画面の向きの水平成分の角度を求める。
(もっと読む)
移動方向判定システム、移動方向判定方法、プログラムおよび記録媒体
【課題】無線タグが発信する無線電波を受信した無線タグリーダによって検出された電波強度値を利用して無線タグの移動方向を判定することができる移動方向判定システムを提供する。
【解決手段】移動方向判定システムにおいて、無線タグ10は、IDが設定され、無線電波を発信する。無線タグリーダ20aと無線タグリーダ20bは、無線タグ10から無線電波を受信する。サーバ装置30の受信部31は、無線タグリーダ20aと無線タグリーダ20bから無線電波に含まれているIDと電波強度値を受信し、IDごとに各無線タグリーダで受信した情報を分類して電波強度値を記憶部32に記録する。受信中の当該ID情報を所定の時間の間に受信していないことを検出した時、記憶部32から当該IDの電波強度値を読み出し、電波強度値の時間的変化履歴に基づいて無線タグリーダ20aと無線タグリーダ20b間における無線タグ10の移動方向を判定する。
(もっと読む)
ゴルフ場における距離及び方向の測定表示装置
【課題】 ゴルフ場における携帯式子機のディスプレイに、グリーンまでの距離のみならずグリーンの方向をも表示して各プレーヤーに容易に知らせることができるようにする。
【解決手段】 各ゴルフプレーヤー3が携行することができる携帯測定表示装置に、衛星測位システムを利用して携帯測定表示装置からグリーン1までの距離と真北Nに対するグリーン1の方位θgとを求める手段と、磁北に対する携帯測定表示装置の方位を求める手段と、真北と磁北との偏角θrにもとづき、磁北に対する携帯測定表示装置の方位と真北に対するグリーン1の方位θgとから、携帯測定表示装置に対するグリーン1の方向を求める手段と、このグリーンの方向及び前記グリーンまでの距離を表示する手段とを設けた。
(もっと読む)
距離測定システム、距離測定方法および通信装置
【課題】 簡単な構成でかつ低コストで移動端末間の距離を測定することが可能な距離測定システム、距離測定方法および通信装置を提供する。
【解決手段】 移動端末100aの第1の位置において移動端末100aの移動方向を示す直線Uに対する他の移動端末100bの方位角θ0 、移動端末100aの第2の位置において移動端末100aの移動方向を示す直線Uに対する他の移動端末100bの方位角θ1 および移動端末100aの移動速度と移動時間とから取得される移動端末100aの移動距離rを用いて、移動する移動端末100aの移動後の位置から他の移動端末100bまでの距離d1 を測定する。
(もっと読む)
クレーンの姿勢演算装置、過負荷防止装置、および作業範囲制限装置
【課題】 簡易な構成によりクレーン姿勢を精度よく検出する。
【解決手段】 クレーンの機体2に設けられ、測位情報を提供する衛星から発せられた衛星波を受信する第1の受信アンテナ10aと、機体2から起伏可能に支持されたブーム3の先端部に設けられ、衛星波を受信する第2の受信アンテナ10bと、第1の受信アンテナ10aと第2の受信アンテナ10bからの信号に基づきブーム長さL、ブーム角度θ1、作業半径r、および作業高さhをそれぞれ演算する姿勢演算部11とを備える。
(もっと読む)
3次元配置型GPS受信機、それを用いた姿勢測定方法及びシステム
【課題】 姿勢が大きく変動しても高精度に姿勢を測定する技術を提供すること。
【解決手段】 4個のGPSアンテナ40〜43を多面体の頂点位置に立体的に配置した3次元配置型GPS受信機を用い、いずれかの仮想面を構成する基線ベクトルから3次元配置型GPS受信機の姿勢を測定する姿勢測定方法を提供する。各GPSアンテナにおいて少なくとも4基の衛星からのGPS搬送波の位相情報を得て、いずれか3個のGPSアンテナにおいて受信した4基の衛星からのGPS搬送波の位相情報から2重位相差を求め、GPSアンテナ間の3つ以上の基線ベクトルを算出すると共に、そのうち2つの基線ベクトル値を該3次元配置型GPS受信機の姿勢値として得る。
(もっと読む)
周波数間バイアス算出装置及び方法
【課題】 簡単な構成で電離層遅延量を正確に求める。
【解決手段】 周波数間バイアス算出装置10は、データ収集部11、周波数間バイアス算出部12、データ出力部13等を備えている。データ収集部11は、GPS衛星40からGPS受信機20,21,22,…までの第一の周波数による各第一の擬似距離と第二の周波数による各第二の擬似距離とを、通信回線41を介してGPS受信機20,21,22,…から入力する。周波数間バイアス算出部12は、データ収集部11から入力した複数の第一及び第二の擬似距離を所定の演算式に代入して、第一及び第二の周波数による周波数間バイアスを算出する。データ出力部13は、周波数間バイアス算出部12で算出された周波数間バイアスを、通信回線41を介してGPS受信機20,21,22,…へ出力する。
(もっと読む)
ナビゲーション装置および建築施設進入判定方法
【課題】 加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出することが可能な「ナビゲーション装置および建築施設進入判定方法」を提供する。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
(もっと読む)
無線周波信号のトラッキング方法
本発明は、受信機が比較的高速で移動するときに、送信機のトラックを維持し、送信機に同調し続ける方法に関する。高速で移動する輸送手段に運ばれた電子装置(10)は、ドップラー偏移によって周波数の偏移を受けうる。本発明は、電子装置(10)の加速度測定手段によって、そのようなドップラー偏移を考慮した方法を提供する。本発明は、特に、衛星の再トラッキングのパワーと時間を消費する、GPS受信機(20)などを含む電子装置(10)に利点がある。本発明は、更に、前記方法を実行するように構成された電子装置(10)とプロセッサ(30)に前記方法を実行させるように構成されたコンピュータプログラムに関する。 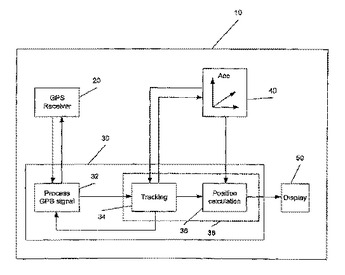 (もっと読む)
(もっと読む)
携帯電話を通して目標位置の方向を取得するための方法
本発明は、携帯電話を通して目標位置の方向を取得するための方法を開示するものであって、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報を取得する過程と、携帯電話の画面に表示されるこの地理的子午線の角度及び現在位置の地理的子午線を決定する過程と、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報に従って現在位置から目標位置への方向を決定する過程と、この方向と地理的子午線との間の仰角を決定する過程とを含む。その画面上に表示される地理的子午線の角度とその仰角とに従って、携帯電話は、現在位置から目標位置への携帯電話の画面上に表示される方向を決定し、表示方向に従って画面上の目標位置の方向を表示する。本発明は、ユーザに目標位置の方向を提供できない既存の携帯電話の問題を解決する。ユーザは、携帯電話を通して目標位置の方向を確認することができる。 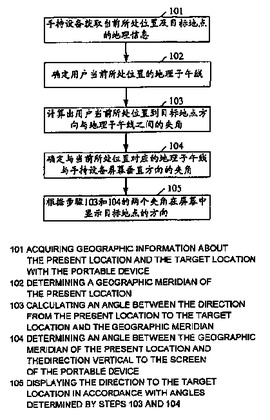 (もっと読む)
(もっと読む)
121 - 139 / 139
[ Back to top ]