
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
21 - 40 / 139
GPSを利用した物体観測システム
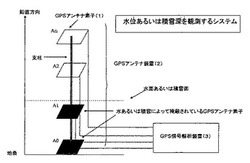
【目的】 GPS電波に対する物体の掩蔽を測定することにより、物体の存在あるいは非存在を識別し、もって人や車両などの物体の移動の検知、土砂崩れなどの検知、水位あるいは積雪の観測を行う。
【構成】 GPSアンテナ素子を点状あるいは線状または面状に配置して、各GPSアンテナ素子のGPS電波の受信状態の時間変化を解析することにより、当該素子が物体で掩蔽されているか否かを識別する。
(もっと読む)
可搬型携帯端末及び方位推定プログラム

【課題】高精度な方位推定を実現する。
【解決手段】水平分力期待値推定部40が、可搬型携帯端末100の位置情報(Pos)に対応する、地磁気の水平分力の大きさの期待値(Mag_Hor_Ex)を取得し、選択部50は、地磁気センサ14において検出された地磁気の水平分力の大きさ(Mag_Hor)が、期待値から所定範囲内にあるか否かを判定し、その判定の結果、検出された水平分力の大きさが、所定範囲内にあると判定された場合に、地磁気センサ14の検出結果を用いた推定方位(Dir_Mag)を出力する。
(もっと読む)
方位検出装置
【課題】磁場の影響を受けることなく、静止状態でも、アンテナの向きの方位を正確かつ迅速に検出することができる方位検出装置を提供する。
【解決手段】方位検出装置が備える衛星データ入力部51には、GPSアンテナ11がGPS衛星から受信した信号に基づいて取得される当該GPSアンテナ11から見たGPS衛星の方位を示す方位情報と、受信した信号の信号レベルと、が入力される。複数のGPS衛星からの信号をGPSアンテナ11が受信すると、フィッティング処理部52は、それぞれのGPS衛星の方位と信号レベルとの関係に、GPSアンテナ11の所定方向に対する角度に応じて変化する信号レベルの傾向から導き出された関数を適合する。そして、方位算出部55は、フィッティング処理部52により適合された関数によって算出される算出信号レベルの傾向に基づいて、GPSアンテナ11の向きを算出する。
(もっと読む)
無線通信機
【課題】 低コストで、位置情報の信頼性の向上に寄与する。
【解決手段】 位置情報検証部11は、自局及び他局の精度情報に基づいて、距離換算精度を求め、この距離換算精度を通信方式による最大通信距離に加算し、さらに安全のための所定のマージンを加算して、最大通信可能距離を算出し、自局位置情報及び他局位置情報に基づいて、自局他局間距離を算出し、自局他局間距離が最大通信可能距離を越えるか否か判定し、越える場合は、位置情報異常と判定する。
(もっと読む)
海面変位計測システム
【課題】基準局の位置が地震で変動しても、RTK法による計測データの連続性を保ち、地震による津波を支障なく検出できる海面変位計測システムを提供する。
【解決手段】第1観測局11での計測データと、観測施設20に設置の第1基準局21での計測データとに基づきRTK法で第1観測局11での海面位置の変動を計測する海面変位計測システム1であって、観測施設20に第2観測局22が設置され、観測施設20とは異なる基準施設30に設置された第2基準局32を基準にRTK法で第2観測局22の位置データを計測し、海面位置データから潮位データを抽出する潮位抽出部43と、潮位データから潮位偏差を算出する潮位偏差演算部46と、潮位偏差と第2観測局22の位置データの各変動に基づき第2観測局22の位置の異常を判断する異常判断部59と、異常判断部59での異常時に海面位置データを補正するデータ補正部42とを具備させたものである。
(もっと読む)
周波数間バイアス推定装置及び周波数間バイアス推定方法
【課題】昼間と夜間との電離層の状態の違いを考慮してより正確な推定を可能とする周波数間バイアス推定装置及び周波数間バイアス推定方法を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する周波数間バイアス推定装置32であって、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部34と、夜間に観測された衛星信号の観測値と総電子数モデル値とに基づいて第1受信機依存周波数間バイアスを推定する夜間観測データ処理部36と、昼間に観測された衛星信号の観測値と総電子数モデル値と第1受信機依存周波数間バイアスとに基づいて衛星依存周波数間バイアス補正量を算出するとともに、衛星依存周波数間バイアス補正量に基づいて第1衛星依存周波数間バイアスを推定する昼間観測データ処理部37とを備える。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】3次元の高さ方向及び水平方向の電離層電子密度分布をより正確に推定し、衛星で観測できない空間部分の推定も可能とする電子密度推定装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する電子密度推定装置であって、1以上の受信機の各々から複数の測位衛星の各々に対する擬似距離およびキャリア位相擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し、当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、総電子数算出部により算出された総電子数に基づいて3次元電子密度推定空間設定部36により分割された領域毎の電子密度を推定する暫定電子密度推定部38と、推定された電子密度に基づいて、同じ高さの電子密度を抽出し、球面調和関数を用いて高さ毎の電子密度分布を近似して推定する3次元電子密度推定部39とを備える。
(もっと読む)
方位角推定装置、方法及びプログラム
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
移動距離算出装置及び移動距離算出方法
【課題】測位誤差を含む位置情報に基づいてユーザの移動距離を算出するに際して、誤差の影響を軽減することにより、移動距離の算出精度を向上する。
【解決手段】位置情報取得部11により複数の位置情報が取得され、移動軌跡判定部16により、時系列上で連続する3点の位置情報により形成される折れ角に基づいて、ユーザが曲線移動中であるか、直線移動中であるかが位置情報ごとに判定され、位置情報選択部17により、直線移動中と判定された位置情報の1つ以上が除去され、除去されなかった直線移動中の位置情報と、曲線移動中と判定された位置情報とが処理対象の位置情報として選択される。こうして選択された位置情報に基づくユーザの移動軌跡は、直線移動中において方向転換をしているかのような誤差が排除されたものとなる。従って、かかる位置情報に基づいて算出されるユーザの移動距離は、高精度なものとなる。
(もっと読む)
ヘディングを決定するためのシステムおよび方法
【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
事故防止監視制御システム
【課題】オペレータに危険距離に近いことを報知して回避させると共に、最悪の事態(接触事故)が発生した場合でも重大事故に拡大することを防止する事故防止監視制御システムを提供する。
【解決手段】この監視制御装置7は、GPS衛星5からの信号に基づいて得られたクレーン車8に係る位置情報を取得する位置情報取得手段11と、クレーン車8の所定範囲内に位置する送電線に係る情報を格納した送電線情報格納手段12と、クレーン車8に係る位置情報と送電線3に係る位置情報とを照合する照合手段13と、照合手段13による照合結果に基づいてクレーン車8と送電線3との離隔距離を判定する離隔距離判定手段14と、離隔距離判定手段14により判定された離隔距離が所定の安全距離よりも短い場合にクレーン車8に対して警報を発する警報発信手段15と、自動復旧装置の使用の可否を制御する自動復旧装置制御手段18と、を備えて構成されている。
(もっと読む)
位置測位端末および位置測位方法
【課題】通話等の機能が制限されることなく位置測位することができると共に、位置測位時に節電することができる位置測位端末および位置測位方法を提供すること。
【解決手段】CPUが直接実行可能なネイティブコードで記述されたアプリケーションによりバックグランドにおいて動作し、測位指令を出力するATFアプリケーション実行部11と、測位指令に基づいてGPS衛星2からGPS信号を受信するGPS信号受信部13と、受信したGPS信号に基づいて自身の現在地を示す位置情報を算出するGPSアプリケーション実行部12と、位置情報を利用したサービスを提供するサーバ装置3に位置情報を送信する通信部14とを備えて構成する。
(もっと読む)
レールふく進計測用GNSS電波観測装置及びレールふく進計測システム
【課題】GNSS測位の利用により、鉄道のレールのふく進を無人で直接的かつ客観的に計測できる観測装置を提供する。
【解決手段】測定点観測装置21は、GPSアンテナ素子63と、アンテナケース61と、アンテナケーブル8と、増幅器71と、受信回路72と、を備える。GPSアンテナ素子63は、レール2に設けられ、レール2の伸縮とともに移動可能である。アンテナケース61は、GPSアンテナ素子63を収容する。アンテナケーブル8は、GPSアンテナ素子63に電気的に接続されるとともに、アンテナケース61から外部に引き出される。前記増幅器71は、前記GPSアンテナ素子から前記アンテナケーブルを介して入力された信号を増幅する。前記受信回路72は、前記増幅器で増幅された信号を処理することにより観測データを取得し、当該観測データを出力する。
(もっと読む)
マルチパス判定装置及びプログラム
【課題】簡単な構成で、GPS衛星からの受信信号がマルチパスであるか否かを精度よく判定することができるようにする。
【解決手段】GPS情報取得部20によって、GPS衛星からの電波を受信する。GPS情報取得部20によって、GPS衛星の情報、及びGPSアンテナ12A、12B間の受信信号の位相差を取得する。到来波相対方向推定部24によって、GPS衛星からの受信信号の位相差に基づいて、各GPS衛星からの電波の相対的な到来方向を推定する。到来波絶対方向算出部22によって、GPS衛星の情報に基づいて、各GPS衛星からの電波の絶対的な到来方向を各々算出する。マルチパス判定部26によって、推定された各GPS衛星からの電波の相対的な到来方向と、算出された各GPS衛星からの電波の絶対的な到来方向とを全体として比較することにより、各GPS衛星からの受信信号がマルチパスであるか否かを各々判定する。
(もっと読む)
地中で発生した電磁場変動を検出する装置および方法
【課題】大規模な発信・受信設備を利用せず、一般の人でも入手が容易なRFIDタグとタグリーダを屋内などに設置することによって、違法に強い人工的電磁波の検出や地中で発生した電磁場変動の検出を可能ならしめる装置および方法を提供する。
【解決手段】監視空間に設置されたm個(m>=1)のRFIDタグから発生する電磁界をn個(n>=1)のタグリーダで前記RFIDタグごとに識別しつつ測定し、m×n個の受信電界強度の変動の様子から地中で発生した電磁場変動を検出する。
(もっと読む)
移動位置検出装置
【課題】ジャイロセンサや加速度センサを用いることなく、安価且つ小型な装置で実際の方位に近い補間位置を特定することができる移動位置検出装置を提供する。
【解決手段】GPS測位位置を一定周期(T)毎に特定するGPS装置11と、車速パルス発生装置12と、前回のGPS測位位置を特定してから新たなGPS測位位置を特定するまでの一定周期(T)中における単位時間(Δt)毎の移動距離を求めて補間位置を特定する計算装置13と、を備え、計算装置13は、単位時間(Δt)毎に特定した補間位置のうち一定周期(T)よりも短い直近の過去一定時間(ΔT)でのGPS測位位置を含む複数の補間位置から平均補間位置を特定し、前回の平均補間位置から最新の平均補間位置への方位を前回の補間位置から最新の補間位置への推定方位とすると共に、その推定方位と前回の単位時間(Δt)での移動距離とを用いて最新の補間位置を特定する。
(もっと読む)
姿勢計測装置
【課題】アンテナ間の距離が短くなっても姿勢の測定精度を向上させることができるようにする。
【解決手段】データテーブル14には、予め求めておいた各アンテナについて各衛星からの信号の移動体座標系における到来方向ごとのカップリング誤差のデータが格納されている。誤差取得部15は、この到来方向に対応したカップリング誤差のデータをデータテーブル14から取得する。姿勢算出部17は、このカップリング誤差を除いた一重位相差又は二重位相差を用いて船舶の姿勢を算出する。
(もっと読む)
計算機装置
【課題】GPS方位計において、整数値バイアスを少ない計算負荷により短時間で導出する。
【解決手段】GPSアンテナ9および10のアンテナ間距離を、GPS衛星11からの測位信号の搬送波の1/2波長以下とするとともに、GPS信号受信部7および8が用いる基準クロックを共通にすることによって、方位計算部12は、GPS信号受信部7および8から得られる信号を用いて、搬送波位相観測値の一重差方程式に含まれる整数値バイアスを簡単な代数計算だけで解ける。
(もっと読む)
方位算出装置、方位算出装置の方位算出方法および方位算出プログラム
【課題】可視衛星数が少なくても正しい姿勢方位を少ない処理数で測定する。
【解決手段】加速度姿勢算出部210は加速度姿勢値を算出し、基線ベクトル鉛直成分算出部211は加速度姿勢値に基づいて基線ベクトル鉛直成分値を算出する。整数値バイアス候補算出部220は基線ベクトル鉛直成分値を用いて整数値バイアス候補を算出する。基線ベクトル候補算出部230は整数値バイアス候補に基づいて基線ベクトル一次候補を算出し、基線ベクトル残差検定部240は二重差残差検定により基線ベクトル二次候補を選定し、基線ベクトルなす角検定部250はなす角検定により基線ベクトル三次候補を選定する。方向余弦行列候補算出部260は基線ベクトル三次候補に基づいて方向余弦行列候補を算出し、方向余弦行列姿勢検定部261は加速度姿勢値に基づいて方向余弦行列を決定し、決定した方向余弦行列に基づいて算出される姿勢方位初期値291を出力する。
(もっと読む)
キネマティックGPSを活用した計器校正飛行試験方法
【課題】高高度領域の航空機の幾何高度を精密かつ簡易に測定して当該航空機の計器を校正する試験方法を提供する。
【解決手段】(3)飛行試験場所近傍に座標の確定した基準点を設け、ここと航空機の双方にK-GPS受信装置を装備する。(5)基準点の地上気圧(P0)及び地上気温(T0)を測定する。(6)航空機の幾何高度をK-GPS受信装置で計測する。(7)航空機と基準点の各幾何高度の差から求めた航空機の幾何高度(H)、地上気圧(P0)及び地上気温(T0)を次式(A)に代入して、飛行高度の大気気圧(P)を換算し、(8)大気気圧Pで航空機搭載ADCの大気気圧を校正して計測誤差等を補正する。P=P0×{1−0.0065H/(273.15+T0)}5.256…(A)
(もっと読む)
21 - 40 / 139
[ Back to top ]