
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
101 - 120 / 139
無線通信装置およびその盗難防止方法
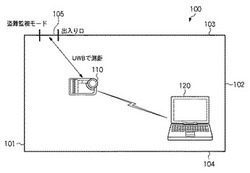
【課題】盗難防止装置の取り付け作業が不要となり、顧客の邪魔にならず、かつ、美観を損ねないような盗難防止技術を提供する。
【解決手段】無線通信装置は、データ通信手段と測距手段とを備えた無線通信部と、測距手段により測定された無線通信装置から特定の位置までの距離が盗難警告の出力条件を満たすと盗難警告を出力する警告出力部とを含む。
(もっと読む)
位置算出装置の進行角決定方法

【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことが可能な自車位置判定装置を提供する。
【解決手段】自車位置計算部14は、自車が駐車場の建物内に存在するか否かを判定するとともに、自車が建物内に存在すると判定された後に、自車が建物の屋上に存在するか否かを判定する屋内・屋上判定部28と、自車が駐車場を脱出したか否かを判定する駐車場判定部30と、自車が建物の屋上に存在すると判定された場合に、駐車場判定部30により自車が駐車場を脱出したと判定されないように判定制御を行う判定制御部32とを有する。
(もっと読む)
姿勢標定装置、姿勢標定方法および姿勢標定プログラム
【課題】姿勢角の標定処理において、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にする。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
移動体管理システム及び移動体装置
【課題】任意の位置における移動体の向きを確実に把握する。
【解決手段】ショッピングカート2は、切換え部31により第1のアンテナ32を選択している状態でこの第1のアンテナから電磁波を放射し、第1のアンテナの通信エリア内の商品陳列棚に配置された位置タグと無線通信を行って位置コードを取得する。そして、取得した位置コードと第1のアンテナの配置位置を無線通信部23から通信用アンテナ29を介してサーバ1に送信する。サーバはデータベース15から位置コードに対応した位置座標を読出し、この位置座標と第1のアンテナの配置位置の関係から、ショッピングカートの現在位置及び進行方向を判断する。そして、判断した現在位置及び進行方向をショッピングカートに送信する。ショッピングカートは現在位置及び進行方向をサーバから受信し、表示部26に表示して知らせる。
(もっと読む)
鉄塔基礎工事用計測装置及びこれを用いた計測方法
【課題】 鉄塔基礎工事での計測を簡易に行うことができ、また、作業者の能力差による計測精度のばらつきを無くし、作業中の基礎材の変位をも容易に確認できる鉄塔基礎工事用計測技術を提供する。
【解決手段】 鉄塔構造物の基礎材1に着脱自在に取り付け可能であり、発信時刻データを含む電波を発振すると共に傾斜角度に関するデータを発信する基礎材取付用計測器2と、鉄塔の中心線上およびそれ以外の任意の3箇所以上の箇所に設置され、前記電波を受信して電波の発信時刻データと受信時刻データとを自身の位置データと共に発信する地上設置装置3と、発信された各種データに基づき、基礎材取付用計測器2を設置する部材の定点位置情報を演算し、この演算された定点位置情報を設計値と比較して修正情報を含む比較結果を演算し表示する計測結果表示装置4とを備える。
(もっと読む)
ブイ式波高計
【課題】GPSブイによる波高・波向計測において、水粒子運動とブイの運動が一致しないため、正しく計測されない問題および、ブイの水平位置とブイの垂直位置の共分散で波向が計測できない問題および、周期帯別波高、波向も計測されてない問題があった。
【解決手段】第1の問題は、水粒子位置とブイの位置のずれが存在する周波数領域の運動成分を除去するディジタルフィルターを通過させる方法と、ブイ位置と水粒子位置との位置ずれをディジタルフィルターで補正する方法で解決した。第2の問題は、水平位置を微分し、水平速度を求め、水平速度と垂直位置の共分散で求める方法で解決した。第3の問題は、ブイの位置データまたは、推測水粒子位置データを、あらかじめバンドパス等のディジタルフィルターを通し、周期帯別に分別しておき、上述の処理をすることで解決した。
(もっと読む)
速度ベクトル決定システム
【課題】GPSなどの衛星信号のみを利用して、コストアップとなる他の推測航法センサを必要とせず、高層ビル街などマルチパスの影響が大きい環境下でも、移動体の最適な速度ベクトルを求めること。
【解決手段】衛星信号追尾装置で追尾している複数衛星の中から、衛星軌道情報に基づく衛星仰角情報及び追尾情報に基づく信号レベル情報を利用して、2つの衛星が共通に含まれ且つ他の衛星が含まれ、3以上の衛星信号からなる複数の組み合わせを求める。その複数の組み合わせ毎の速度ベクトル解をそれぞれ演算して速度ベクトル解候補を得、且つそれら各速度ベクトル解候補間の一致度に基づいて、最適速度ベクトルを求める。
(もっと読む)
距離測定装置
【課題】 出発点から現在位置および目標位置までの距離を同時に測定して音声で報知できる距離測定装置を提供する。
【解決手段】 スイッチ3を操作したことに応じて、CPU21がGPS受信回路5の出力に基づいて、現在位置の位置情報を計測してその位置情報を現在位置としてメモリ22に記憶し、移動後にスイッチ4からの指令が与えられたことに応じて、現在位置から移動後の位置までの距離と、移動後の位置とメモリ22に予め記憶しているグリーンまでの距離とを算出して各距離をスピーカ6から音声で報知する。
(もっと読む)
方向情報取得方法
【課題】 鉛直方向の認知が困難な空間においても簡便に方向情報取得ができる手法を提供する。
【解決手段】 半球のアンテナパターンを有するGPS平面アンテナ11を用いる。この平面アンテナ11に接続したGPS受信部に天球の各GPS衛星から送信される信号の捕捉を試みさせ、GPS受信部で受信した信号を処理して当該GPS平面アンテナの覆域に存在する各GPS衛星 S2,S7,S8,S12,S15,S20,S22を判定し、測位計算の過程で得られる各GPS衛星のGPS平面アンテナ中心からの各方向ベクトルと、当該GPS平面アンテナ11の法線ベクトルのなす角度は90度以下(内積は0以上)であることに基づき、GPS平面アンテナ11の法線ベクトルの方向Dmを特定の領域Rdm内に限定する。
(もっと読む)
運動データ表示制御装置、携帯型機器及びプログラム
【課題】位置データが取得できない場合であっても正確な運動データをユーザに提供すること。
【解決手段】ユーザの運動中、位置データが取得されたと判別した場合は、この位置データに基づいて現在の運動データを算出する(A7→A13、A15)が、取得されなかったと判別した場合は、振動データから運動データを換算するための換算データを、検出された振動を示す振動データと算出した運動データとに基づいて算出・記憶しておき(A7→A19)、取得されなかったと判別した時点から取得されたと判別するまでの間、換算データに基づき、検出された振動から現在の運動データを換算・推定し(A7→A29、A31)、取得されたと判別している間は、算出した運動データを最新の運動データとして表示制御し、取得されなかったと判別した時点から取得されたと判別するまでの間は、推定した運動データを最新の運動データとして表示制御する(A21、A23)。
(もっと読む)
気象測定装置、気象測定方法、及びプログラム
【課題】 雲の有無を局所的に測定することができる気象測定装置を提供する。
【解決手段】 この気象測定装置は、4個以上のGPS衛星それぞれから、発信時刻情報及び発信地点情報を含むGPS信号を受信するGPS信号受信部10と、受信した4種類以上のGPS信号を演算処理することにより、GPS信号受信部10の位置を示す位置情報を算出する位置情報算出部12と、位置情報、第1のGPS信号に含まれる発信地点情報、及び電波の基準伝搬速度を用いることにより、第1のGPS信号が発信されてから受信されるまでの基準遅延時間を算出する基準時間算出部13と、第1のGPS信号を受信した時刻と発信時刻情報との差である実遅延時間を算出する遅延時間算出部14と、基準遅延時間と実遅延時間の差を用いて、第1のGPS信号を発信したGPS衛星とGPS信号受信部の間に存在する水蒸気量を算出する水蒸気量算出部15とを具備する。
(もっと読む)
架設管理システム
【課題】 移動対象物の移動位置や姿勢をGPS位置測定装置を使用して三次元的に測定して管理する架設管理システムを提供すること。
【解決手段】 移動対象物50にGPS位置測定装置11〜14が取り付けられ、そこから得られる位置データに基づき移動対象物の位置や姿勢を求めるものであって、GPS位置測定装置は、複数のGPSアンテナ11がそれぞれ異なる箇所に設置され、各箇所の座標に関する位置データを地上側に無線送信する送信装置を備えるものであり、地上側には、位置データを受信する受信装置21と、位置データに基づいて移動対象物の移動位置や姿勢を算出し、予め記憶された障害物の三次元座標データに基づいて障害物の位置を算出する演算処理装置23と、その演算処理装置により算出された結果に基づいて移動対象物の移動状況を画面表示する表示装置23とを備える架設管理システム。
(もっと読む)
移動局の横滑角計測装置
【課題】 横滑角の精度を高めた移動局の横滑角測定装置を提供する。
【解決手段】 移動局に搭載した角速度センサ10およびGPS演算装置12と、移動局の重心に搭載した加速度センサ14と、角速度センサ10から得られるヨー角速度(r)と横滑角速度(dβ/dt)とを加算した値と、加速度センサ14から得られる公転加速度(d2y/dt2)をGPS演算装置12から得られる前進速度(v)で除した値とに基づいて積分を行うことで積分値(I)を求め、当該積分値(I)を横滑角(β)として算出する横滑角算出手段20とを有する。加速度センサ14を重心に搭載するので、横滑角速度(dβ/dt)に起因する加速度の混入が防止され、公転加速度(d2y/dt2)のみを検出できる。このように加速度センサ14へ横滑角速度(dβ/dt)に起因する加速度の混入を防止した点で、横滑角(β)の精度が高められる。
(もっと読む)
物体を追跡するための無線システム
物体に接続可能なトランスポンダ装置(12)を備えた、位置を求めるために空間において物体を追跡するためのシステム(10)である。前記トランスポンダ装置(12)は、一又は数個のトランスポンダアンテナ(20)、ならびに、それを介して無線信号を受信するためトランスポンダアンテナ(20)に接続されたトランスポンダ回路(21)を有している。当該トランスポンダ装置(12)は、無線信号に対して既知の遅延を加算し、これにより、トランスポンダアンテナ(20)を介して送信するための無線応答を生成する。送信器(42)は、それを介して無線信号を送信するための第一アンテナ(43)に接続されている。受信器(42)は、それを介してトランスポンダ装置(12)の無線応答を受信するため、第一、第二ならびに第三アンテナ(43、44、45)に接続されている。位置算出器(46)は、物体の位置を、既知の遅延に応じ、ならびに、第一、第二、第三アンテナ(43、44、45)からの無線信号の発信から受信までの時間として算出するため、送信器(42)および受信器(42)に関連づけられている。また、方法も提供される。 (もっと読む)
測位装置
【課題】 単独で自機位置の測位が可能な携行用の測位装置において、特定した自機の位置の情報を、周辺地図等の詳細な表示が可能な携帯端末に容易に転送できるようにする。
【解決手段】 GPS受信機12がGPS測位に必要なGPS衛星情報をGPS衛星からの信号で受信し、得られたGPS衛星情報を用いて複数のGPS衛星からの信号を受信し、制御マイコン13が受信した信号を演算することで、単独で自機位置を特定し、表示部14に表示する測位装置1において、制御マイコン13は、表示部14での自機位置の表示を、テキスト表示だけでなく、バーコード情報での表示を可能とする。したがって、バーコード情報の読取り機能を有し、GPS測位可能な携帯電話機に、自機位置の情報を容易に転送することができ、該携帯電話機側では、逐次自機位置を更新しつつも、GPS衛星情報の取得や自機位置の演算のための通信は発生せず、通信費用を抑制することができる。
(もっと読む)
建設機械の計測表示機構
【課題】 建設機械本体の姿勢を算定して建設機械の周辺状況と共に表示手段に正しく表示することができる建設機械の計測表示機構を提供する。
【解決手段】 下部走行体及び上部旋回体を有する車体と地中を掘削する作業機とを備えた建設機械に使用され一対のGPS受信機43,44での計測結果に基づいて作業機のモニタポイントの三次元位置を計測して、車体等を建設機械の周辺状況と共にモニタ46aに表示してオペレータに伝達する建設機械の計測表示機構において、GPS受信機43,44での計測結果に基づいて上部旋回体の姿勢に係る値を演算する旋回体の姿勢演算手段と、この上部旋回体の姿勢演算手段で演算された上部旋回体の姿勢に係る値の水平方向の成分の変化に基づいて上部旋回体に対する下部走行体の姿勢に係る値を演算する走行体の姿勢演算手段を車載コンピュータ46に設けて、車体をモニタ46aに表示する場合に下部走行体及び上部旋回体の各姿勢を表示できるように構成した。
(もっと読む)
受信機
【課題】少なくとも自船と対象となる事象との距離を容易に取得して出力することができる簡素な構造の受信機を提供する。
【解決手段】受信機1はナブテックス放送信号を受信するとテキストデータを再生して、緯度経度情報に必ず含まれる特定文字列「数字、N、数字、E」を抽出し、この特定文字列が含まれるセンテンスから緯度経度情報を抽出する。次に、ナブテックス受信機1は、この抽出した緯度経度情報と自船の緯度経度情報とから、抽出した緯度経度情報で表される位置と自船位置との距離を算出するとともに、自船位置に対する方位を算出する。そして、少なくとも算出した距離情報と抽出した緯度経度情報とを外部出力する。
(もっと読む)
101 - 120 / 139
[ Back to top ]