
Fターム[5J062AA11]の内容
Fターム[5J062AA11]の下位に属するFターム
Fターム[5J062AA11]に分類される特許
41 - 60 / 139
移動体位置検知装置及び車両位置検知運転支援システム
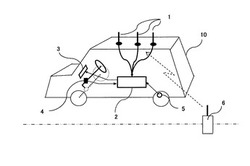
【課題】本発明では、道路上における走行中の車両の位置を検出することができる移動体位置検知装置を提供する。
【解決手段】走行中の道路上での移動体の相対的な位置を検知する移動体位置検知装置は、路側に設置した送信機からの電波を受信する3つのアンテナと、各アンテナで受信した電波間の位相差を検知する位相差検出回路と、所定の位相差検出回路による検出の結果、位相差がない場合、他の位相差検出回路のそれぞれで検出された位相差が等しい場合、それらの位相差を加算し、その加算した位相差に基づいて、3つのアンテナの配置関係に応じた受信側基準点と送信機との間の距離を、送信機に対する受信側基準点の相対位置として算出する相対位置算出回路と、を備えることにより、上記課題の解決を図る。
(もっと読む)
携帯端末装置の方位を推定するための装置および方法

携帯端末装置の現在の方位(o(i))を現在の地理的位置と推定するための装置(60)であって、そこにおいて、現在の地理的位置で、現在の測定時間(i)に携帯端末装置の現在の方位(o(i))を有する現在の地理的位置で受信されうる無線送信機(22)の送信機識別および電磁信号特性を含む現在の測定パッケージ(MP(i))が決定されうり、装置は、現在の測定パッケージ(MP(i))と現在の測定時間の前に存在する基準時間に基準方位を有する基準測定パッケージに割り当てられる地理的基準位置で受信できた基準無線送信機の送信機識別、基準方位(ok)および電磁信号特性を含む基準測定パッケージ(RPk)との間の一致測定(acck)を決定するための手段(62)、一致測定(accn)を含む少なくとも1つの基準測定パッケージ(RPn)を選択するための手段(64)、および少なくとも1つの選択された基準測定パッケージ(RPn)の基準方位(on)に基づいて携帯端末装置の現在の方位のための推定(o´(i))を決定するための手段(66)を有する。 (もっと読む)
加速度計測装置
【課題】データサイズの制限による値域の制限を有するデータを用いる場合でも、新たに定義する不定値に基づく不定性の概念を利用することにより、受信点の加速度を求めることができる加速度計測装置を提供する。
【解決手段】加速度計算部3は、搬送波位相のデータを含む測位用データに基づいて、搬送波位相の加速度成分を算出する。続いて、加速度計算部3は、搬送波位相のデータに関するデータサイズまたは時間間隔に応じた搬送波位相の加速度成分の不定値を算出する。続いて、加速度計算部3は、搬送波位相の加速度成分に不定値を加算することによって、不定性を解消した搬送波位相の加速度成分を算出し、それと方向余弦とに基づいて、受信点の加速度を算出する。
(もっと読む)
可動物体の距離及び/又は方位を決定する装置及び方法
本発明は、可動物体の距離及び/又は方位を決定する装置及び方法に関し、該装置及び方法は、可動物体に取り付けられると共に規定周波数を有する少なくとも1つのトランスミッタとレシーバを含む。前記トランスミッタは既知の偏波面を有するアンテナを有し、前記レシーバは左円偏波アンテナ及び右円偏波アンテナを有し、前記レシーバは分析装置を備える又は分析装置に接続され、前記分析装置は規定周波数を考慮して、受信した2つの信号から2つの測定位相値を決定し、前記2つの信号により距離及び/又は方位を計算できる。逆の動作を行うデバイスでは、トランスミッタが2つの円偏波アンテナを有し、レシーバが既知の偏波面を有するアンテナを含む。 (もっと読む)
アレイアンテナ装置および送信源位置推定方法
【課題】電離層を通過して到来した電波の送信源の位置を推定することができるアレイアンテナ装置および送信源位置推定方法を提供する。
【解決手段】演算部15は、アレイアンテナ11の受信信号から、送信源からの電波の到来方位および仰角を算出する。電離層密度推定部4は、航法衛星からの衛星信号および電離層電子密度分布モデルを用いて、3次元的な電離層電子密度分布を算出する。伝播経路推定部5は、演算部15で算出した到来方位および仰角と、電離層密度推定部4で複数の観測時刻において算出した電離層電子密度分布とを用い、観測時刻ごとに、マルチホップ伝播および地球磁場の影響を考慮した場合の複数の推定伝播経路および複数の送信源候補位置を算出し、各送信源候補位置について複数の観測時刻間の分散値を算出し、複数の送信源候補位置のうち分散値が最小となる送信源候補位置を真の送信源位置として算出する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
サンプリング同期装置、サンプリング同期方法
【課題】周波数を高精度かつ短時間で安定させるサンプリング同期装置等を提供する。
【解決手段】
サンプリングシステムは、サンプリング同期装置1,2、データ収集サーバ3を備える。サンプリング同期装置1は、GPS受信機11、サンプリング同期回路12、サンプリング回路13、解析回路14、を備える。受信機11は、GPSクロックを出力する。サンプリング回路13は、内部に水晶発振器、サンプリング演算回路、サンプリング同期パルス出力部を内蔵し、演算回路は、過去に測定したGPSクロックの1パルス内に含まれる水晶発振器のパルス数を計算する。これに基づいて、サンプリングタイムを各々水晶発振器のパルス数として出力する。サンプリング同期パルス出力部は、GPSクロックの立ち上がり点を開始点としてそれぞれのサンプリングタイムを水晶発振器のパルス数としてカウントし、そのパルス数に到達すると、サンプリング同期パルスを出力する。
(もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法
【課題】RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面の変位計測装置を提供する。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
(もっと読む)
移動端末、並びにその屋内外判定方法及びプログラム
【課題】地図情報を用いず正確に屋内外判定を行うことが可能な移動端末、並びにその屋内外判定方法及びプログラムを提供する。
【解決手段】移動端末1を、GPS衛星4からGPS受信器11を用いて受信した測位用信号SG1の受信電力RRPを測定する電力測定部12と、測位用信号SG1に含まれる位置情報I1から、移動端末1の移動距離LMを推定する移動推定部13と、受信電力RRP及び移動距離LMに基づき、移動端末1が屋内又は屋外のいずれに位置するか判定する判定部14とで構成する。また、判定部14は、送信部20に対して前記判定の結果に応じた制御信号SG2を与えることにより、他の通信装置に対して送出される無線信号の送信電力を制御する。
(もっと読む)
測位装置
【課題】地上子を増設することなく、任意の場所でキロ程の補正を可能とする。
【解決手段】列車3に搭載された測位装置5は、計算機6とGPS受信機7を備える。GPS受信機7はGPSアンテナ4から入力されるGPS信号を用いて、GPSアンテナ4の位置座標(緯度・経度)を算出し、計算機6へ出力する。計算機6は複数の仮想地上子200、201、202のデータを格納しており、GPS受信機7から出力されるデータを受信できる機能を有する。計算機6が格納する仮想地上子200、201、202のデータは、各仮想地上子の位置座標(緯度・経度)情報と、各仮想地上子の位置でのキロ程情報から構成される。計算機6はGPS受信機7から列車3の現在の位置座標情報を入力するとともに、入力した列車3の現在位置に近似する位置の仮想地上子のキロ程情報に基づいてキロ程の真値を導出して、キロ程の補正を行う。
(もっと読む)
位置情報監視システム及び方法
【課題】監視対象が客なのか従業員なのか、徒歩による移動なのか、乗り物による移動なのかなど、監視対象の属性に応じて監視方式を変更し、監視対象の属性に基づく特有の行動を把握することで、適正な監視を行う。
【解決手段】 移動端末1a〜1cにより、電波信号を介した無線によりデータ通信を行い、該データ通信により、当該移動端末において受信される電波強度に関する情報を無線情報として送信するとともに、自機周辺の状況を周辺情報として発報し、監視側において、アクセスポイントを通じ、移動端末1a〜1cから周辺情報及び無線情報を収集し、各移動端末の位置情報を生成し、各移動端末の属性に応じて、生成された位置情報を修正し、移動端末の位置情報と、移動端末からの周辺情報とを関連づけて表示する。
(もっと読む)
移動局の状態検出システム
【課題】移動局を設けた設置対象の状態を推定する。
【解決手段】移動局タグTは偏波方向が固定であるタグアンテナ32を備える。固定局リーダRは、互いに交差する2つの偏波面を生成可能な備えたリーダアンテナ12と、電波信号の受信時刻を検出する到来時間検出部19と、リーダアンテナ12の2つの偏波方向における受信信号強度をそれぞれ検出するRSSI部17とを備える。管理サーバSは、到来時間検出部19で検出した受信時刻に基づき移動局タグTから固定局リーダRまでの距離を検出し、かつRSSI部17で検出した2つの偏波方向での受信信号強度に基づき移動局タグTの姿勢を検出し、それら距離及び姿勢検出結果に応じ移動局タグTの状態判定を行う。
(もっと読む)
GPS受信機
【課題】高速移動中でも、地図画面をスムーズに更新することのできる携帯型のGPS受信機を提供すること。
【解決手段】GPS受信機は、現在の所在地と過去の所在地とに基づき、次フレームの所在地を推定し(S108)、次フレームの所在地と現在の所在地とに基づき、更新データ量を推定する(S110)。更新データ量が所定値を超えていると判断した場合に(S112でNO)、現在の所在地の表示位置が画面の端部になるように、地図サーバより地図データをダウンロードする(S120,S124,S126)。
(もっと読む)
航行体の姿勢検出方法及び装置
【課題】2つのアンテナで航行体の姿勢を求める。
【解決手段】第1アンテナa1及び第2アンテナa2を離間して航行体1に搭載し、複数の測位用衛星S1,S2から発信された電波の各々について、第1アンテナa1及び第2アンテナa2に届く電波の位相差を算出し、各位相差から、複数の測位用衛星S1,S2と、第1アンテナa1と第2アンテナa2を結ぶ線分とがなす角をそれぞれの姿勢角として算出し、求めた複数の姿勢角θ1,θ2を合成することにより航行体1の姿勢を求める。
(もっと読む)
電離層電子密度分布推定システム及び測位システム
【課題】伝播経路電離層総電子数を精度よく推定して電離層の電子密度分布を推定する電離層電子密度分布推定システム及び測位システム。
【解決手段】変形カルマンフィルタを使用してサイクルスリップの有無を判定することにより継続したデータ収集期間を特定するフィルタ処理部21と、フィルタ処理部によって特定されたデータ収集期間について、キャリア位相に関連した不確定値を除去した後の複数キャリア位相擬似距離差を電離層電子数に変換する電離層総電子数推定部22と、電離層総電子数推定部で得られた電離層電子数を用いて電離層の電子密度分布を推定する電子密度推定処理部22aを備える。
(もっと読む)
自車位置検出装置
【課題】衛星測位が不能となる駐車場退出直後に自車位置/進行方位を適正に修正する「自車位置検出装置」を提供する。
【解決手段】衛星測位可能に復帰した衛星測位で求まる自車の位置/進行方位320を、旋回中心点330から衛星測位で求まる自車の位置/進行方位320へ向かう線分上に、旋回中心点330を回転中心として回転し、第1仮自車位置/進行方位311とする。第1仮自車位置/進行方位311に整合する各リンク301、302について、リンクの向きと一致するように、旋回中心点330を回転中心として、第1仮自車位置/進行方位311を回転し、第2仮自車位置/進行方位312、313とし、第2仮自車位置/進行方位312、313とリンクとのマップマッチングを行う。そして、各リンクについてのマップマッチングによって求めた位置のうち、最も確からしい位置と当該位置が存在するリンクの向きに、自車位置/進行方位311を修正する。
(もっと読む)
加速度計測装置
【課題】受信点の速度を求めることなく受信点の加速度を求めることができる加速度計測装置を提供する。
【解決手段】衛星受信部2aは、アンテナ1によって受信された電波に基づく電気信号を処理し、測位用データを測位部2bへ出力すると共に、同じく測位用データである搬送波位相(またはドップラー周波数)および航法メッセージのデータを加速度計算部3へ出力する。測位部2bは、衛星受信部2aからの各測位用データに基づいて受信点の概略位置を算出し、算出結果のデータを加速度計算部3へ出力する。加速度計算部3は測位用データおよび受信点の位置に基づいて、搬送波位相の加速度成分と測位用衛星の位置と方向余弦とを算出し、算出した各データに基づいて受信点の加速度を算出する。
(もっと読む)
自車位置検出装置
【課題】 座標誤差により方位が違っていると使用者に感じさせること(方位のアンマッチ感)を軽減することができる自車位置検出装置を提供すること。
【解決手段】 自車の方向を自車からの通信による座標位置から演算し、表示部18で自車方向を表示し使用者を自車へ誘導する携帯機1において、表示部18は、自車の方向を示す指向性表現と自車位置までの距離感の表現を一体化したA方向〜H方向の第1表示401〜第7表示407を備えた。
(もっと読む)
ナビゲーション装置および角速度検出信号補正値算出方法
【課題】車両の現在位置の算出精度を向上できるナビゲーション装置を提供する。
【解決手段】平均化する処理を行った操舵角検出信号の出力値に基づいて車両が直進しているか否かを判断し、車両が直進していると判断されると、ジャイロセンサ11aから出力される角速度信号のばらつきが小さければ、角速度信号の平均値を角速度信号の補正値ωaとして設定するように構成した。したがって、直進走行時のハンドルの遊びや操舵角検出信号の出力値の微少な変動の影響を抑制して車両が直進しているか否かを判断できるので、車両が直進しているときに角速度信号の補正値ωaを設定する機会を増やすことができる。これにより、車両の進行方位の算出精度、および、車両の移動量の算出精度を向上して、車両の現在位置の算出精度を向上できる。
(もっと読む)
41 - 60 / 139
[ Back to top ]