
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
241 - 252 / 252
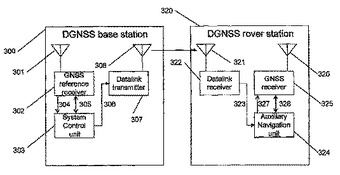
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
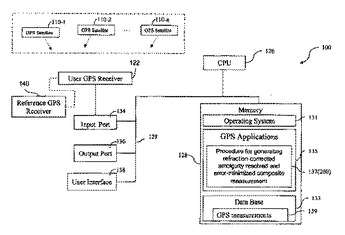
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
本発明は、ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、別個に利用された際にRTKおよびWADGPSナビゲーション技術に付随する短所が回避される。本方法には、静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化することを含んでいる。その後で、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知の(分散が小さい)として扱われてWADGPSシステム内でユーザー受信器を測位する。
 (もっと読む)
(もっと読む)
時刻情報を有しない衛星信号の処理方法および装置
衛星信号受信機の位置を特定する方法および装置が説明される。1つの例において、複数の衛星に対する衛星信号受信機の距離を推定する疑似距離が取得される。最初の時点で、疑似距離を使用して絶対時間および位置が計算される。次に後続の時点で、他の位置を計算するため絶対時間が使用される。他の例において、衛星信号受信機に関連づけられた複数の状態が推定される。ここで、複数の状態は時間タグ誤差状態を含む。次に、複数の状態を関連づけるダイナミックモデルが形成される。ダイナミックモデルは、衛星信号受信機の位置を計算するように動作する。 (もっと読む)
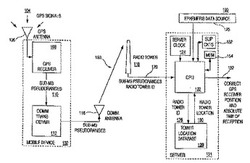
到着時間差(TDOA)測位サービスの方法とシステム
到着の時間差方法を使用して位置を三角測量するために3次元位置座標を使用し、誤差を減少し、誤差を訂正し、移動送信装置と基地局で高度に正確なクロックの必要性なしで全地球測位システムを利用する、移動送信装置の位置を決定する方法とシステム。 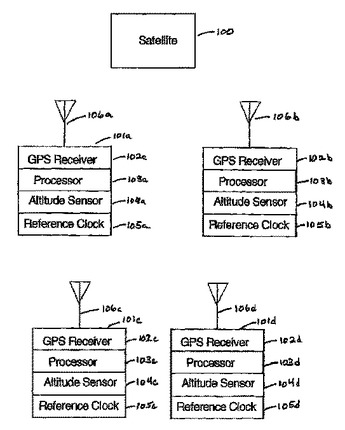 (もっと読む)
(もっと読む)
広域またはグローバルディファレンシャルGPSシステムのためのクロック補正値を生成するための方法
WADGPSネットワークのための衛星クロック補正値を生成するための方法は、他の実質的な誤差成分を除去した後に、衛星クロック補正値を計算する。電離層屈折影響により引き起こされる誤差は、二周波数GPS測定値を使用して、基準局で取得されるGPS測定値から取り除かれる。マルチパス雑音は、キャリア−位相測定値を用いるGPS擬似距離コード測定値の平滑化により取り除かれる。対流圏屈折影響は、モデル化によって大部分は取り除くことができ、所望される場合、クロック補正値の計算に含まれる小さな確率論的な調整を使用することにより改善できる。前記誤差要因を取り除いた後に、個別基準局について衛星クロック補正値が計算される。そして、衛星を見ることができる基準局に関して衛星クロック補正値の平均または加重平均を取ることにより、複数の衛星のそれぞれに平均クロック補正値が形成される。
 (もっと読む)
(もっと読む)
アシストSPSシステムにおける情報配信方法及び装置

アシストSPSシステムにおいて情報を配信する方法及び装置である。この方法及び装置は、第1の衛星ネットワーク内の第1の衛星から電離層情報と、クロック情報と、衛星完全性情報のうちの少なくとも1つを備える情報を受信し、受信された情報は第2の衛星の少なくとも1台の衛星に関係がある。受信された情報は補強支援データを形成するため支援データと組み合わされる。補強支援データはモバイル受信機に伝達され、モバイル受信機は第2の衛星システムの少なくとも1台の衛星からの衛星信号を処理するため補強支援データを使用する。代替的に、受信された情報はモバイル受信機の位置計算の精度を改良するためサーバーによって使用される。 (もっと読む)
3個のGPS周波数を用いて搬送波位相の整数値バイアスを解決する方法
本発明は、アンビギュイティが解消され、屈折が補正され、且つノイズが最小化された搬送波位相測定値を生成する方法を含んでいる。本方法は、L1、L2およびL5周波数におけるGPS搬送波位相測定値を用いて第1の合成測定値を形成するステップを含んでいる。第1の合成測定値におけるノイズを減らすべく、本方法は更に、3種のGPS搬送周波数のうち少なくとも2種におけるGPS搬送波位相測定値を用いて第2の合成測定値を形成するステップを含んでいる。第2の合成測定値は、内在するマルチパス・ノイズが小さくなるように形成されるため、これを用いて第1の合成測定値を平滑化して、マルチパス・ノイズを最小化することができる。
 (もっと読む)
(もっと読む)
受信機自動インテグリティ監視、並びに故障検出及び除去の方法
GPS受信機で考慮される複数の衛星に関してGPS受信機により得られる複数のGPS測定結果の中から、不完全な測定結果を検出し識別する方法は、複数のGPS測定結果が不完全な測定結果を含むかどうかを判断する。複数のGPS測定結果が不完全な測定結果を含むという判断に応じて、該方法は、複数の衛星の各々に関連する相関値を計算すること、及び不完全なGPS測定結果の原因となっている衛星として最高の相関値に関連する衛星を選定することにより、不完全な測定結果の原因となっている衛星を識別する。
 (もっと読む)
(もっと読む)
ロケーションネットワークにおいて補助データを提供するためのシステム及び方法
全地球的航法衛星システム(GNSS)および位置判定ユニット装置の同期化ネットワークからなるロケーションシステムにおける位置受信器に補助を提供するためのシステムおよび方法が開示される。位置判定ユニット装置は、位置判定ユニット装置の同期化ネットワークに対する全地球的航法衛星システム(GNSS)信号の時間および周波数を観測する。これらの時間および周波数観測は、補助データとして、位置判定ユニット装置によって同報通信される位置判定信号上へ変調される。位置判定受信は、この補助データを復調し、位置判定信号を解析する。そして、位置受信器は、受信された位置判定信号の補助データおよび解析に応答した範囲で全地球的航法衛星システム(GNSS)信号を検索する。 (もっと読む)
無線ネットワークハイブリッドポジショニングのための方法及び装置
【課題】無線ネットワークハイブリッドポジショニングのための方法及び装置。
【解決手段】ポジション決定及び他の操作のための方法及び装置。本発明の一実施例においては、移動局はポジション決定のため(例、データ通信のため、時間及び/又は周波数情報取得のため、範囲測定のため、セクター又は高度推定のため)複数の無線ネットワーク(例、異なるエアインタフェースを有し、及び/又は、異なるサービスプロバイダーによって操作される)からの無線信号を使用する。本発明の一実施例においては、無線アクセスポイントについての統計データ(例、無線アクセスポイントから、例えば、携帯電話基地局、無線ローカルエリアネットワークアクセスポイント、ポジショニング信号用の中継器、或いは他の無線通信送信機などから、信号を受信した移動局のロケーション)を採取するために、又ロケーション情報(例、無線アクセスポイントのポジション及びサービスエリア)を収集された統計データから無線ネットワーク用に取り出すために、移動局は使用される。
(もっと読む)
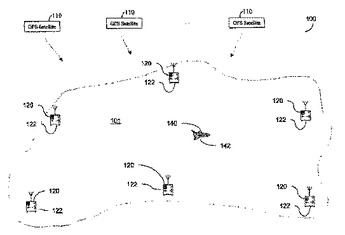
無線周波モーション・トラッキング・システムと方法
無線周波数(RF)モーション・キャプチャ・システムは、静止センサ受信器と、キャプチャ域内で追跡すべき1つ以上の物体上の1個以上の送信器マーカー・タグと、少なくとも1つの静止基準タグ送信器と、受信信号を処理する処理システムとを含む。個々のタグはスペクトル拡散RF信号のバーストを送信する。送信信号は共通の同期コードと、各タグに固有のタグ識別コードを含む。擬似範囲の2重差を計算することにより、時間項がキャンセルされて、センサとタグとの間でクロックを同期する必要性なしに、キャプチャ域を移動するに従って処理システムが各タグの位置を正確に決定可能となる。本システムはRF整合移動に使用可能である。 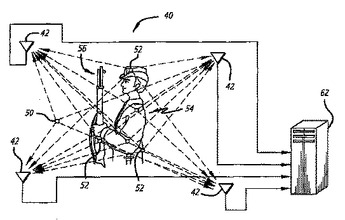 (もっと読む)
(もっと読む)
前方障害物検出機能付き携帯情報端末
【課題】 前方障害物を検知するために省電力設計された障害物検出センサを装備することにより、前方障害物を検知し、ユーザに報知することを可能にした携帯情報端末を提供する。
【解決手段】 障害物検出センサに加えて、振動センサを装備することにより、携帯情報端末が使用されている状況を検知し、その状況に応じて障害物センサを起動する。この障害物検出センサにより、端末のディスプレィを凝視しているユーザが注視していない前方障害物を検知し、報知することができる携帯情報端末ができる。また、振動センサに監視タイマーを設けることで、一定期間毎に振動センサを一時起動させる事により、省電力化がなされた。
(もっと読む)
241 - 252 / 252
[ Back to top ]