
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
121 - 140 / 252
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 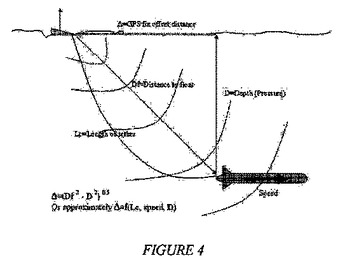 (もっと読む)
(もっと読む)
絶対位置算出装置、及びその絶対位置算出方法

【課題】
GPSを用いた測位手段において、従来よりも、精度を向上させた絶対位置の算出、位置計測のを行うことを課題とする。
【解決手段】
3台のGPS受信機とアンテナを用いて、絶対位置の算出、位置計測するものとする。
先ず、3台のGPS受信機を用いて、それぞれの計測地点で、GPS衛星からのデータを取得する。
そして、3台のうちで、予め定めた2台の計測地点間の距離を拘束条件としフィルタリング処理を行い、絶対位置の算出を行うものととする。
上述の絶対位置の算出、位置計測を行うことによって、従来よりも精度を向上させた絶対位置の算出、位置計測を可能とするものである。また、計測時間の短縮化を図ることも可能とするものである。
(もっと読む)
3つのGPS周波数を用いて整数値サイクル(whole−cycle)搬送波位相アンビギュイティを解消する方法

配置非依存であり、屈折が補正され、アンビギュイティが解消された、搬送波位相測定値を取得するための新たな3種周波数技法が記載されている。まず、少なくとも2つのワイドレーン搬送波位相測定値差異に対するアンビギュイティを、対応する周波数加重コード測定値を平均化することによって取得する(210)。そして、これらの2つのアンビギュイティが解消された測定値を結合して、屈折が補正された合成測定値を形成する(220)。結果としての合成測定値は、元の搬送波位相測定値におけるマルチパス・ノイズの増幅に起因して極めてノイズが多い。しかしながら、このノイズの多い屈折が補正された搬送波位相測定値を、別の、ノイズが最小であり、屈折が補正された搬送波位相合成測定値を用いて平滑化することができる。ノイズが最小であり、屈折が補正された合成測定値を、それらの整数値サイクルアンビギュイティを解消する前に初期搬送波位相測定値から構成する(230)。2つの屈折が補正された測定値の差異を平滑化する(240)ことによって、ノイズを低減することができ、低ノイズ測定値におけるバイアス(不正確なアンビギュイティに起因する)を推定して後に補正することができる。 (もっと読む)
ダムの外部変形評価方法
【課題】地震発生の後、短時間でダムの外部変形度合いを高精度に評価できるようにした、ダムの外部変形評価方法を作成することが課題である。
【解決手段】ダムに設置された複数のGPS受信装置を用いてリアルタイムに外部変形度合いを計測し、得られた時系列計測データからCPUによりダムの変位データを算出して記憶手段に記憶すると共に、該変位データにフィルタ処理・平滑処理を行なった処理済み変位データを算出して記憶手段に記憶するようにしたダムの外部変形具合の評価方法において、地震発生信号により地震前に算出したダムの変位データにおける標準偏差σと地震後におけるダムの変位データの平均値xとを算出し、該平均値xと地震前の標準偏差σとを用い、前記CPUでZ推定により変位を算出するようにした。
(もっと読む)
車載用ナビゲーション装置及びその制御方法
【課題】GPS受信手段を二系統用いる簡明な手法で自車位置判定の精度を効果的に向上させるカーナビゲーションの技術を提供すること。
【解決手段】切替手段88は、2つのGPS受信機による測位精度が所定基準以上に良好で、かつ、第1の自車位置情報と第2の自車位置情報の位置同士が所定範囲内に近接し、かつ、この所定範囲内に道路情報(例えば道路リンク)が存在しない場合に、マップマッチングの結果に代えて、第1の自車位置情報と第2の自車位置情報の平均値(位置及び方位)を算出して自車位置として採用する(切替処理)。
(もっと読む)
移動体姿勢計測装置
【課題】従来に比べて移動体の姿勢の計算が簡易なものとし、また、移動体の姿勢の算出値の精度を向上させる。
【解決手段】移動体に設けられて衛星の信号を受信する基準アンテナ11及びn個(1,2,3,…)のユーザアンテナ12で受信した衛星の信号から前動体と前記衛星との位置関係を算出する。また、各アンテナで受信した衛星信号の搬送波位相を測定する。そして、この搬送波位相から一重位相差又は二重位相差を計算する。基準アンテナとユーザアンテナとの位置関係、移動体と衛星との位置関係、及び一重位相差又は二重位相差の関係に基づいて、一重位相差又は二重位相差に対する未知の整数値アンビギュイティ、移動体の未知の姿勢成分、及び一重位相差又は二重位相差についての初期値を算出する。非線形推定法を利用して初期値を収束させることにより、未知の整数値アンビギュイティ及び移動体の未知の姿勢成分を算出する。
(もっと読む)
観測装置、土地地盤変位監視システムおよびアンテナ装置
【課題】人や車両の通行を妨げたり、景観を損ねたりすることのない、観測装置および当該観測装置を用いた土地地盤変位監視システムを提供する。
【解決手段】土地地盤変位監視システム1は、高速道路15の路側帯16上の各測定点に埋め込まれた測定点観測装置10と、位置が既知である基準点に設置された基準点観測装置11と、監視装置12とから構成される。測定点観測装置10は舗装部19に固定されている。測定点観測装置10と基準点観測装置11とは、GPS衛星21からの電波を受信し、電波の搬送波の位相に関するデータ等を求める。監視装置12は、測定点観測装置10と基準点観測装置11とから受信した位相に関するデータ等から基準点に対する測定点の相対位置を求め、さらに相対位置の変化から測定点の土地地盤変位を検知する。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 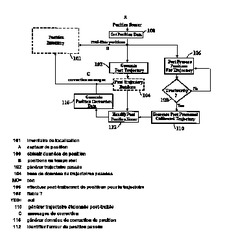 (もっと読む)
(もっと読む)
測位方法及び装置
【課題】本発明の目的は、電波航法において加減速や方向転換するなどの移動局に動きの変化があったり、基準局から移動局への補正情報や観測データの送信遅延があったとしても、移動体の現時刻の位置を高精度に測位することを可能にすることである。
【解決手段】測位情報を発信する衛星の信号から、衛星の軌道情報、現時刻の搬送波位相を検出し、位置が既知である基準局で観測時刻に観測された搬送波位相と、衛星の軌道情報に基づき算出した観測時刻と現時刻における衛星の位置、観測時刻における基準局での搬送波位相をもとに、現時刻における基準局での一重位相差または現時刻における基準局での受信機クロック誤差及び搬送波位相を予測し、移動局の搬送波位相、予測された基準局の一重位相差あるいは搬送波位相及び衛星位置をもとに、移動局の位置を算出する。
(もっと読む)
測位機能を備えた携帯端末
【課題】タイマの有効性を維持した上で、測位サーバとの間が通信不可能な場合にはいち早く自律測位モードに遷移させる。
【解決手段】携帯端末MS1〜MSnに測位モード変更制御機能133を設ける。そして、このモード変更制御機能133により、アシスト測位モードにおいて測位サーバSV2から補助情報を取得する際に、タイマ20の計時期間中にプロキシサーバSV1との間の接続に成功したか否かを判定し、接続に失敗したと判定した場合にはその時点でタイマ20の計時動作を強制終了して測位モードをアシスト測位モードから自律測位モードに変更する。また、測位サーバSV2との間の接続に成功した場合でも、当該測位サーバSV2から返送された情報が送信不可メッセージだった場合には、その時点でタイマ20の計時動作を強制終了して測位モードをアシスト測位モードから自律測位モードに変更する。
(もっと読む)
測位システム、測位方法および測位用プログラム
【課題】基準点から測定点までの基線長が短い場合において、両地点間に高低差があっても、気象条件の変化の影響を受けることなく、測定点の位置が求められるようにする。
【解決手段】測定点の受信装置uと位置が既知である基準点の受信装置sとは、GPS衛星j、kから送信される電波を受信し、電波の搬送波の位相データや航法メッセージ中のGPS衛星j、kの軌道情報などを解析装置12に送信する。受信装置sの近くに配置された気象観測装置11は、地上の気温と相対湿度との観測値を解析装置12に送信する。解析装置12は、気温と相対湿度との観測値を修正Hopfieldモデルのウエット項に代入して、基準点および測定点における電波の対流圏伝搬遅延量を計算する。さらに、両地点での対流圏伝搬遅延量、受信装置u、sから受信した位相データおよびGPS衛星j、kの位置情報から測定点の位置を求める。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
搬送波位相式測位装置
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
位置検出装置及び位置検出方法
【課題】サイクルスリップ等が発生した場合に対して、整数値バイアスの確定処理を一からやり直す必要を無くすこと。
【解決手段】本発明による位置検出装置は、移動局が所定周期毎に観測する衛星信号の搬送波位相の積算値に含まれる整数値バイアスを推定して移動局の位置を検出する位置検出装置であって、整数値バイアスの推定に用いる共分散行列を、前回周期で導出した各衛星に係る共分散を用いて更新し、今回周期で新たな衛星が観測可能となった場合、前記共分散行列に、該新たな衛星に係る共分散として所定の初期値を追加することを特徴とする。
(もっと読む)
目的位置案内方法及びシステム
【課題】位置センサにより計測した現在位置とゴールとなる目的位置の位置関係を携帯端末に表示し、容易な目的位置の入力方法で目的位置への案内を行う目的位置案内方法および目的位置案内システムを提供する。
【解決手段】地図をイメージスキャナで携帯端末に読み込み、デジタル地図として取り込む。地図に記載され、現場においても確認できる基準点2点の緯度経度座標値を、衛星測位システムの位置センサで計測する。基準点2点の緯度経度座標値は、直交座標系の座標値に変換し、デジタル地図の各ドットに対応する直交座標値を算出する。携帯端末では、衛星測位システムの位置センサの情報と、無線機からの補正信号を受け取り、位置センサが出力する現在位置とデジタル地図の現在位置のポインタが一致するようにデジタル地図を表示する。携帯端末には、作業者の歩行に伴い移動する現在位置の印とデジタル地図上の目的位置が同時に表示される。
(もっと読む)
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
測位システム、測位装置、通信基地局の制御方法、その制御プログラム及び記録媒体
【課題】マルチパスを判断し、マルチパスの場合には通信基地局におけるコードフェーズを使用するよりも精度よく測位することができる測位システム等を提供すること。
【解決手段】通信基地局40は、測位装置20の初期位置を算出する初期位置算出手段と、通信基地局40における衛星信号のコードフェーズと初期位置における衛星信号のコードフェーズとの推定差分を算出する推定差分算出手段と、衛星信号に基づいて算出したコードフェーズと推定差分に基づいて、初期位置における推定コードフェーズを算出する推定コードフェーズ算出手段等を有し、測位装置20は、推定コードフェーズと衛星信号を受信して算出した端末コードフェーズとのコードフェーズ差分を算出するコードフェーズ差分算出手段と、コードフェーズ差分に応じて、推定コードフェーズ又は端末コードフェーズを使用して測位を行う測位手段と、を有する。
(もっと読む)
通信基地局、その制御方法、その制御プログラム及び記録媒体、及び、測位装置
【課題】通信基地局と通信可能な測位装置に対して、通信基地局におけるコードフェーズを使用することが妥当である条件を満たした場合にのみ、通信基地局におけるコードフェーズを提供することができる通信基地局等を提供すること。
【解決手段】通信基地局40は、測位装置20との間を通信電波が伝播する伝播時間が予め規定した時間許容範囲内か否かを判断する伝播時間評価手段と、各衛星信号のコードフェーズを算出するコードフェーズ算出手段と、通信基地局40が算出したコードフェーズと測位側コードフェーズとの差分を算出する差分算出手段と、差分が、マルチパスの影響を受けている場合の差分範囲であるマルチパス影響範囲内か否かを判断する差分評価手段と、差分評価手段によって、差分がマルチパス影響範囲内であると判断した場合に、通信基地局40が算出したコードフェーズを測位装置20に送信する補正値送信手段等を有する。
(もっと読む)
GPSを用いた測量システム
【課題】海上工事などにおいて、高精度で杭などの移動体を位置決めすることができる。
【解決手段】GPS30を用いた測量システム1は、陸上4に設けたGPS固定局31と、夫々にGPS移動局32を取り付けることで常に絶対位置が把握され、自動追尾機能を有する複数のトータルステーション10と、鋼管杭2に固定され、トータルステーション10と同数以上の反射体20と、GPS移動局32の位置に基づき、トータルステーション10が反射体20を視準して得られた反射体20の位置座標を修正し、鋼管杭2の現実の位置を算出する解析手段41と、鋼管杭2の現実の位置と計画位置との差を演算する比較手段42とを備えている。
(もっと読む)
測位装置
【課題】安価で、許可位置範囲を容易に設定できる測位装置を提供する。
【解決手段】GPS衛星からの電波を受信し現在位置Aを測位する測位手段1と、測位手段1で測位された測位データを記憶する記憶手段2と、外部機器4と接続することで、外部機器4から記憶手段2へアクセスされるようになした接続手段3とを備え、記憶手段2に記録された測位データを外部機器4に表示させることが可能な測位装置Aにおいて、予め設定された許可位置範囲と前記現在位置の測位データとを比較する比較手段を更に備えており、比較手段の比較結果から、測位された現在位置が許可位置範囲内にない場合は、外部機器4からのアクセスを禁止するようになしており、許可位置範囲は、記憶手段2に記憶された測位データを用いて設定できるようになした測位装置A。
(もっと読む)
121 - 140 / 252
[ Back to top ]