
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
61 - 80 / 252
作業車の走行制御装置

【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
受信されたSPS信号の時間基準を入手するシステムおよび方法
本明細書で開示される主題は、衛星および/または地上ナビゲーション・システム内の送信機から受信される信号の時間基準を入手するシステムおよび方法に関する。受信機で第1送信機から受信される第1信号に関連する第1の時間基準が入手される。第2送信機からの第2信号に関連する第2時間基準が、第1の時間基準および受信機から第1送信機までの第1飛程と受信機から第2送信機までの第2飛程との間の推定された差に基づいて入手される。 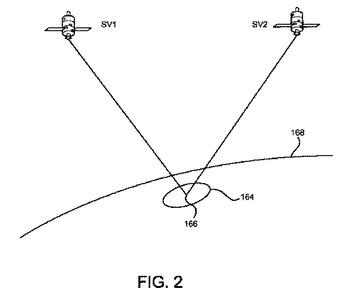 (もっと読む)
(もっと読む)
位相ずれ算出装置及び測位装置

【課題】測位側のアンテナが建物の傍など障害物の近傍に設置されていても、アンテナで受信した衛星信号のマルチパス誤差分を求め、衛星信号のマルチパス誤差分を除去して、正確な測位ができるようにする。
【解決手段】 マルチパス算出部10は、アンテナ4に対する障害物とアンテナ4との相対位置情報、衛星41の位置情報、及び、障害物の反射率の各情報に基づいて、衛星41の信号の搬送波位相に障害物によるマルチパス雑音により発生したずれを算出する。搬送波位相前処理部11は、単独測位部9で単独測位した衛星41の信号の搬送波位相から、マルチパス算出部10で算出したマルチパス雑音によるずれ分を差し引くことにより当該搬送波位相のずれを除去する。
(もっと読む)
雑音成分除去装置及びプログラム
【課題】簡便な構成で、GPS受信機の搬送波位相測定値に含まれる雑音成分を推定することのできる技術を提供する。
【解決手段】GPS受信機1において測定した搬送波位相測定値に対して雑音成分を除去するための雑音成分除去プログラムにおいて、GPS受信機1で測定した搬送波位相測定値に基づき、2周波数の受信信号に対する幾何距離項を含む第1の線形結合及び電離層遅延項を含む第2の線形結合量を算出する。算出した第1及び第2の線形結合量から、第1及び第2の時間変動成分をそれぞれ抽出する。第1及び第2の時間変動成分を抽出した値に基づき、共分散行列を算出する。算出した共分散行列の成分に基づいた比例係数値σαβ/σααと第2の時間変動成分抽出値とを用いて、第1の線形結合に含まれる測定雑音由来項を推定した値を算出する。
(もっと読む)
測位システム、測位装置、サーバ、測位方法及びプログラム
【課題】何らかの方法で航法データを短時間に取得すること。
【解決手段】測位システム1において、携帯型電話機2は、所定の基準日時のエフェメリスデータと現在日時のエフェメリスデータとの差分である差分エフェメリスデータをサーバ3に要求する。サーバ3は、この要求を受けて、GPS衛星又は外部システムから逐次取得して蓄積的に記憶しているエフェメリスデータのうち、携帯型電話機2から送信された基準日時におけるエフェメリスデータ及び現在日時におけるエフェメリスデータを基に、現在日時の差分エフェメリスデータを生成して携帯型電話機2に送信する。そして、携帯型電話機2は、サーバ3から受信した現在日時の差分エフェメリスデータ及び記憶している基準エフェメリスデータを基に所定の測位演算を行って現在位置を測位する。
(もっと読む)
移動通信端末
【課題】無線通信ネットワークの圏内から圏外に移動したときでもGPS機能を発揮し得る移動通信端末を提供する。
【解決手段】移動通信端末1では、GPS受信部16,17は、内蔵GPSアンテナ11Gを介して衛星電波を受信し、この衛星電波に基づいてGPS信号を生成する。接続検出部18は、外付けGPSアンテナ2がコネクタ15に接続された状態を検出する。このとき、GPS処理部14Aは、スタンドアロン測位モードの状態をオフからオンに切り替え、このスタンドアロン測位モードに従ってGPS信号を捕捉し、当該捕捉結果に基づいて測位演算を実行し得る。
(もっと読む)
GPSデータ処理装置
【課題】複数のGPS基準局からの補正情報を選択的に切替えながら取得して相対測位をした場合に、各GPS基準局の設置位置誤差によって移動局での測位で得られた経路が不連続にならないGPSデータ処理装置を提供する。
【解決手段】GPS基準局の各々の設置誤差データを記憶すると共に、GPS受信機で算出された移動局の位置データに対し、受信しているGPS基準局の設置誤差データで修正演算する位置修正演算装置と、この修正演算結果を表示するモニタ装置を備える。GPS受信機はGPS衛星から受けたGPS情報と切替えられたGPS基準局から受けた補正情報とから移動局の位置データを算出し、前記位置修正演算装置は前記算出された位置データに対し、切替えられて受信しているGPS基準局の設置誤差データで修正演算して位置データを得る。
(もっと読む)
フィンガプリント測位のための測定システム及び方法
位置データに加えて、通信ネットワーク(10)によりサービス提供されるユーザ端末(12)内の追加的な測位データを収集するためのシステム、コンピュータソフトウェア及び方法である。当該方法は、上記ユーザ端末(12)内でメッセージを生成することにより、上記ユーザ端末(12)の物理的位置の決定の基礎とされる情報を含む上記測位データの収集を開始するステップと;上記ユーザ端末(12)により、上記メッセージに応じて、上記ユーザ端末(12)の上記物理的位置に関連する少なくとも1つのパラメータを測定するステップと;上記ユーザ端末(12)内で、上記少なくとも1つのパラメータを含む測定報告を生成するステップと;上記ユーザ端末(12)内で、上記ユーザ端末(12)により生成される上記メッセージに応じて生成された1つ以上の測定報告を選択するステップと;選択された上記1つ以上の測定報告を上記ユーザ端末(12)内のインタフェース(38)にレポートするステップと;上記インタフェース(38)から、レポートされた上記1つ以上の測定報告を、外部サーバ(60)へ又は上記通信ネットワーク(10)へ送信するステップと、を含む。 (もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を特定する特定精度の向上を計ることができる位置特定装置、位置特定装置を実現するコンピュータプログラム及び位置特定方法を提供する。
【解決手段】信号機が設置された交差点に関する交差点情報に基づいて歩行者の位置を特定する位置検出装置10であって、交差点情報を受信し、受信した交差点情報に基づいて、交差点の位置を取得する。また、信号機が青信号と赤信号とを切り替える信号切替タイミングを、受信した交差点情報に基づいて取得する。操作部16から操作を受け付けたタイミングが、取得した信号切替タイミングと合致するか否かを判定し、合致する場合、歩行者の位置を、交差点の位置と特定する。
(もっと読む)
位置検出装置
【課題】移動体の絶対位置を高精度に検出する位置検出装置を提供することを課題とする。
【解決手段】移動体の絶対位置を検出する位置検出装置1であって、移動体の絶対位置を取得する絶対位置取得手段10と、移動体の絶対位置の確率分布を取得する絶対位置確率分布取得手段10と、移動体間の相対位置関係を取得する相対位置関係取得手段11と、3体以上の移動体の絶対位置とその絶対位置の確率分布及びその3体以上の移動体間の相対位置関係に基づいて当該3体以上の移動体の絶対位置を特定する絶対位置特定手段21とを備えることを特徴とする。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
衛星測位システム使用可能なメディア測定システムおよび方法
【課題】意図された目的(メディアディスプレイ露出)のためにメディアディスプレイ位置のような種々の位置の効果を決定する監視装置を提供する。
【解決手段】監視装置200は、多数の調査応答者に分配されている。監視装置200は応答者の移動を追跡する。応答者の移動を追跡するために種々のテクノロジーが使用されることができるが、監視装置200の位置追跡の少なくともいくつかは、全地球測位システム(“GPS”)のような衛星105の位置決定システムを使用する。応答者および監視装置200のこれらの移動は、ある地点で、いくつかのメディアディスプレイ150への露出と一致する。監視装置によって収集されたジェオデータ(移動データ)は、応答者がどのメディアディスプレイ150に露出されたかを決定するダウンロードサーバ300にダウンロードされる。露出決定は事後処理サーバ400によって行われる。
(もっと読む)
車車間相対位置算出装置、車車間相対位置算出装置に送信する送信装置、車車間相対位置算出装置用のプログラム、および送信装置用のプログラム
【課題】衛星航法用衛星からの信号に基づいて2台の車両間の相対位置関係を算出する技術において、算出の精度を従来よりも向上させる。
【解決手段】以上のように、車両1、2の車載通信装置は、複数のGPS衛星3〜6から電波を受信し、受信した当該電波の搬送波位相を特定する。そして車載通信装置は、他車両(車両1の場合は車両2、車両2の場合は車両1)から、当該他車両において観測された搬送波位相の情報を受信する。そして車載通信装置は、他車両から受信した搬送波位相と、自車両の搬送波位相のうち、同時刻に観測されたもの同士のずれ(一重差、二重差等)に基づいて、干渉測位の方法により、自車両の他車両に対する相対位置を算出する。
(もっと読む)
GPS測位装置及びGPS測位方法
【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
ネットワークにわたって位置を定めるためのシステム
位置が知られている1つまたは複数の送信機によって送信された機会信号を用いて、ネットワークにわたって位置、周波数およびクロックオフセットを定めるためのシステムであって、当該システムは以下のものを含んでおり:すなわち、基地受信機を有しており、当該基地受信機はクロックおよび既知の位置を有しており、前記送信機までのレンジを定め、機会信号の一連のサンプルを採取し、当該一連のサンプルに受信時間、計算されたレンジに基づいて計算された送信時間、またはその両方でタイムタグを付ける。基地受信機は、一連のタイムタグが付されたサンプルと、必要に応じて、計算されたレンジを遠隔受信機に伝送する。所与の遠隔受信機は、機会信号のサンプルを格納し、タイムタグを付け、タイムタグが付された一連のサンプルを、格納されたサンプルと相関させ、タイムオフセットを、遠隔受信機での受信時間と、基地受信機での受信時間または基地受信機で計算された送信時間の1つまたは両方との差として計算する。遠隔受信機は位置を、当該タイムオフセットと、必要に応じて、基地受信機によって提供されたレンジに基づいて計算する。遠隔受信機の高さが、位置計算の一部として計算されてもよい。これは、Z座標を平均的な高さに強制することに基づいて反復して定められる、または、基地受信機と遠隔受信機での気圧センサ示度における差から定められる。 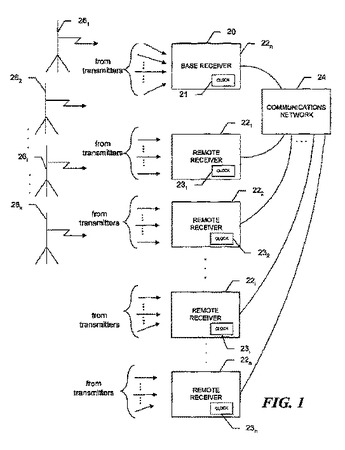 (もっと読む)
(もっと読む)
測位装置、測位システム、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、測位システム、コンピュータプログラム及び測位方法を提供する。
【解決手段】測位装置10は、衛星からの搬送波位相及び擬似距離を測定し、アンビギュイティの初期値を算出し、算出した初期値を用いて解の候補を推定する。測位装置10は、自身の概略の水平位置(緯度、経度)とその水平位置での道路の高度情報により測位装置10の高さ位置(より正確には衛星信号の受信用アンテナの高さ位置)の範囲を設定し、各衛星からの搬送波位相が等しい等位相の多数の交点(解の候補)の中から、設定した範囲内にある解の候補に限定した上で真の解であるか否かの検定を行う。
(もっと読む)
軌道情報誤り検出装置、航法システム及びそれに用いる軌道情報誤り検知方法
【課題】 ユーザへの警報通知時間を低減可能とし、リアルタイム航法で安全に利用可能なGPS衛星軌道情報誤り検出装置を提供する。
【解決手段】 GPS衛星1−1〜1−6から放送される軌道情報であるエフェメリスデータの誤りを検出する軌道情報誤り検出装置(データ処理部)は、エフェメリスデータの世代管理を行う管理手段(A1)と、管理手段にて管理するエフェメリスデータが更新されたことを検知する検知手段(A1)と、検知手段が前記更新を検知した時に相対軌道予測アルゴリズムによってエフェメリスデータの有効期間における衛星軌道位置の差の最悪値を算出する算出手段(A2〜A4)と、算出手段で算出された最悪値が予め設定された閾値より大きい場合に該当するGPS衛星を使用しないようにユーザへの補正データによって当該GPS衛星の排除を行う手段(A5)とを有する。
(もっと読む)
測位システム及び測位方法
【課題】GPS衛星などが送信した電波を受信することにより受信装置の位置を測位する測位システムにおいて、ミリメートル級の高精度な測位を実現する。
【解決手段】GPS衛星などが送信した電波を、校正点受信装置110及び測定点受信装置210が受信する。受信した電波に基づいて、校正点擬似距離算出装置120及び測定点擬似距離算出装置220が擬似距離を算出する。電子基準点においてGPS衛星などが送信した電波を受信することにより算出した誤差に基づいて、校正点擬似距離誤差補正装置160及び測定点擬似距離誤差補正装置260が擬似距離を補正する。補正した擬似距離に基づいて、校正点位置算出装置170及び測定点位置算出装置270が校正点算出位置及び測定点算出位置を算出する。算出した校正点算出位置及び測定点算出位置に基づいて、測定点相対位置算出装置340が測定点相対位置を算出する。
(もっと読む)
雑音検出装置及び測位装置
【課題】衛星信号の搬送波位相を利用して測位するときに、各受信機で独立し、さらに各衛星で独立して、受信した信号に含まれるマルチパス雑音とサイクルスリップを検出できるようにする。
【解決手段】マルチパス強度等計算部15では、ある時刻及び別の時刻におけるL1信号及びL2信号にそれぞれ当該信号の波長を乗算する。そして、その乗算後のそれぞれの値について、当該ある時刻の値と別の時刻の値との差を求める。次に、この求めたL1信号の差信号とL2信号の差信号との差を求める。そして、この値の絶対値や二乗値を所定の基準値と比較する。
(もっと読む)
GPS測位システム
【課題】GPS衛星を利用した測位に、測位地点の近くに高層建築物などの測位誤差要因が存在する場合にも高い精度で測位できる。
【解決手段】現地条件観測用GPS受信機30は、GPS衛星20からの電波受信に高層建築物40からの反射波の影響を受けやすい場所に設置され、GPS衛星からの電波受信による測位データと内部設定された絶対位置データとの偏差(ずれ分)を補正データとして周辺に送信する。GPS測位端末10Aは、現地条件観測用GPS受信機の周辺に位置したときに補正データを受信して現地点の測位データを補正する。
現地条件観測用GPS受信機に代えて、その地点の絶対位置(緯度、経度)データを周辺に送信する位置標識を備え、GPS測位端末は絶対位置データを検知して現地点の測位データを更新する。
(もっと読む)
61 - 80 / 252
[ Back to top ]