
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
101 - 120 / 252
測位システムおよびそれに用いられる受信端末機

【課題】測位作業の効率を高めることができる測位システムを提供する。
【解決手段】受信端末機11が取得した測位データを演算処理機14で解析して測位対象点Sの測位を行う測位システム10である。演算処理機14は、測位データを受信すると、当該受信前に格納部22に格納されている解析用データDaに受信した測位データを累積して新たな解析用データDaとして格納し直して解析した結果を受信端末機11に送信する構成とされ、受信端末機11は、所定時間ti分となった測位データを演算処理機14に送信するとともに継続して測位データを取得し、解析用データDaの解析結果を受信すると、解析結果の良否を判断し、否の場合、測位データを最後に送信した時点からの測位データが所定時間ti分となると、これを演算処理機14に送信するとともに継続して測位データを取得し、良の場合、測位対象点Sの測位を終了する構成とされている。
(もっと読む)
衛星位置決め基準システムおよび方法

【課題】衛星位置決め基準システムおよび方法
【解決手段】特定のSPS基準受信機が見える所のSPS衛星から受信された衛星位置推算用データ。複数のディジタル処理システムは、通信ネットワークを介して送信される衛星位置推算用データを受信するために通信ネットワークに結合される。ディジタル処理システムは、擬似距離をSPS移動受信機から受信し、SPS移動受信機の位置情報を擬似距離データの表示および通信ネットワークから受信された衛星位置推算用データから計算する。ディジタル処理システムは、通信ネットワークから擬似距離補正値も受信し、擬似距離データの表示を行うように擬似距離データを補正するためにこれらの補正値を使用する。本発明のこの例の一実施形態では、移動SPS受信機は通信するように結合される。
(もっと読む)
マリンホースのホースライン監視システム
【課題】マリンホースの重量の増加を抑えてGPS受信機を設置することができ、かつ設置したGPS受信機の損傷を防止するようにしたマリンホースのホースライン監視システムを提供する。
【解決手段】複数のGPS受信機11を、ホースラインの長手方向に所定間隔で設置する際に、ホースラインを形成する複数のマリンホース1のフロート層9の水上側位置で、ニップル部2b外周に埋設し、この埋設した複数のGPS受信機11が送信した位置データに基づいて、陸上の監視基地に設置した演算装置がホースラインHLの形状を算出し、その算出データをモニターに表示する。
(もっと読む)
列車位置検知装置
【課題】GPS受信機を複数化したうえで測位結果の監視判定に工夫を凝らすことにより装置異常にも非装置異常にも適切に対処する列車位置検知装置を実現する。
【解決手段】路面電車20に搭載されて速度計22から得た速度情報をGPS受信機33,73の測位結果(X1,Y1),(X2,Y2)に反映させることで車両位置(X5,Y5)を検知する車上処理装置34が、GPS受信機33,73の一方からしか測位結果が得られないときには異常予見状態であると判定し、さらに、路線マップデータ及び付加データに照らして測位の不能な所に居る場合には異常予見状態が発現したときに故障などの装置異常が発生したと判定するが、測位の可能な所に居る場合には異常予見状態が所定の設定時間以上に亘って継続したときに装置異常が発生したと判定する。
(もっと読む)
車載ナビゲーション装置、ナビゲーションシステム及びコンピュータプログラム
【課題】GPSを利用して車輌の位置を測位する場合に、電波を直接受信可能なGPS衛星の数が少ない場合にも、高精度で測位を行なえるようにする。
【解決手段】GPS衛星からの直接波による測位結果に基づいて、GPS衛星からの反射波の経路長Ld1+Ld2を直線距離Lに補正する補正量をデータベース化しておく。直接波を受信可能なGPS衛星の数が必要な数に満たない場合に、他のGPS衛星からの反射波をデータベースに基づいて補正することにより、直接波と補正された反射波とによって測位を行なう。
(もっと読む)
航法システム
【課題】計算能力の低い飛しょう体においても位置精度が非常に良いCPDGPS計算結果を利用できるようにするとともに、リアルタイムに飛しょう体の軌跡および到達ポイントを指令局側で正確に把握することが可能な航法システムを得る。
【解決手段】飛しょう体に搭載された航法装置1によるGPS受信機の観測データを、飛しょう体の監視および制御を行う指令局8へ送信し、指令局8側でGPS基準局11のデータと組み合わせてCPDGPS計算を実行する。その計算結果はテレメトリを通じて飛しょう体に再送信され、航法計算機によるGPSとINSの複合航法計算の自己位置計算の補正に使用する。また、この過程で、指令局8が飛しょう体の軌跡を精度良く把握することが可能となるため、ターゲット座標へ正確に誘導されたかどうかを把握することが可能になる。
(もっと読む)
移動体用測位装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】本発明による移動体用測位装置1は、慣性航法測位部60と、衛星と移動体の間の擬似距離を計測するGPS受信機20と、擬似距離推測部80と、衛星軌道情報に係る衛星の位置の分散と、慣性航法測位部60により導出された前記移動体の位置の分散と、GPS受信機20の時計誤差の分散とに基づいて、擬似距離推測部80により推測された擬似距離ρ推測の分散ρ推測を算出する分散算出部30と、を備える。好ましくは、GPS受信機20により計測された擬似距離ρと、擬似距離推測部80により推測された擬似距離ρ推測とを結合して、結合擬似距離ρCOMを算出する擬似距離結合部40と、この結合擬似距離ρCOMを用いて移動体位置を測位する測位演算部50とを更に備え、擬似距離結合部40は、分散算出部30により算出された分散ρ推測を用いて、結合擬似距離ρCOMを算出する。
(もっと読む)
多衛星測位(ALLINVIEW)でのコヒーレントなグローバルポジショニングシステム(GPS)信号の擬似ランダムノイズ(PRN)コード捕捉およびナビゲーションソリューション(NavigationSolution)の算出のための方法およびシステム
本開示の方法およびシステムは、一度に1つのGPS信号捕捉ではなく、同時の、多衛星測位でのコヒーレントなPRNコード信号処理法に基づく、GPS衛星測距信号のより堅牢な検知を可能にする。さらに、当該方法およびシステムは、GPSのPRNコード信号を一度に1つ捕捉する従来の捕捉方策と比べると、組合された信号の信号対雑音比(SNR)捕捉性能において10dB以上の改善を可能にし得る。当該方法およびシステムはさらに、ユーザおよび基地局の両方に共通の測距誤差の除去を自動的に可能にし、マルチパス誤差がコード位相計測値に導入するのを最小限にする。  (もっと読む)
(もっと読む)
測位方法、測位装置及び測位プログラム
【課題】GPSのマルチパス誤差を推定し、その結果からしきい値を用いて判定し、マルチパスの存在する人工衛星を使用しない従来のマルチパス誤差の除去方法は、測位に使用可能な人工衛星の数が十分でない場合、測位不能となる可能性がある。
【解決手段】サイクルスリップ検知手段100は、GNSS衛星などから送信された信号の搬送波位相の値の連続性の有無を判定し、連続性がないときサイクルスリップが発生したと検知する。マルチパス誤差計算手段110は、サイクルスリップ検知手段100からサイクルスリップが発生していないという検知情報が入力されるときに、擬似距離と搬送波位相の距離差を取ると共に、電離層の影響を取り除くことで、マルチパス誤差を計算する。擬似距離算出手段120は、マルチパス誤差計算手段110で計算されたマルチパス誤差を擬似距離から差し引いてマルチパス誤差を除去した擬似距離を算出する。
(もっと読む)
移動体姿勢計測装置
【課題】手間暇をかけることなく、移動体の姿勢の計算の精度を向上させる。
【解決手段】 姿勢算出部13は、記憶部12に記憶している各アンテナの相対的位置関係から船体の姿勢を算出する。位置関係算出部14は、基準アンテナから見た各アンテナの相対的位置関係を算出する。座標系変換部15は、位置関係算出部14で算出した各アンテナの相対的位置関係を移動体座標系に変換する。補正部16は、移動体座標系に変換後の各アンテナの相対的位置関係についてフィルタリングにより誤差を補正する。更新部17は、記憶部12に記憶されている各アンテナの相対的位置関係を補正後の各アンテナの相対的位置関係により更新する。
(もっと読む)
位置情報補正システム及び位置情報補正方法
【課題】携帯端末装置の演算負荷の増大や大型化を回避しつつGPSで測位した位置情報を補正することができる位置情報補正システム及び位置情報補正方法を提供すること。
【解決手段】携帯端末1及びカーナビゲーションシステム3を搭載した車両の位置情報がサーバ装置4に送信される。サーバ装置4において、近傍車情報抽出部44が携帯端末1に現在最も近い車両を抽出し、その近傍車の情報を携帯端末1に送信する。携帯端末1は、近傍車の識別情報に基づいて、その近傍車に対して、通信制御部12を介して位置情報の誤差演算を要求する信号を送信する。カーナビゲーションシステム3は、携帯端末1からの誤差演算の要求信号を受信すると、GPSの位置情報の誤差を演算し、演算された誤差の情報を、通信制御部32を介して本サービスを利用する携帯端末1に送信する。携帯端末1は、誤差情報に基づいて、自装置のGPS15で測位した位置情報を補正する。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 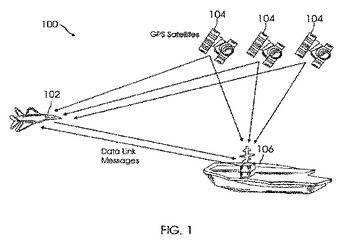 (もっと読む)
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 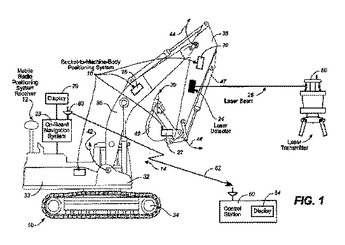 (もっと読む)
(もっと読む)
仮設構造体の健全性判定システム
【課題】GPSを利用して被測定物である仮設構造体の健全性を判定する仮設構造体の健全性判定システムを提供することにある。
【解決手段】仮設構造体の健全性判定システム10は、建設用仮設足場11に設置されたGPS受信装置15と、GPS受信装置15の受信機14がGPS衛星12から受信した観測データに基づいてGPSアンテナ13A〜13D間の基線ベクトル17A〜17Eを算出するコンピュータ16とを備えている。コンピュータ16は、基線ベクトル17A〜17Eによって画成された基準三角形22と実測三角形23との比較要素の相違点を用いて建設用仮設足場11の残留変形を測定する。
(もっと読む)
移動体用測位システム及びこれに用いる装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】第1移動体に設けられ、衛星からの信号の受信結果に基づいて該衛星と該第1移動体との間の擬似距離を算出する第1擬似距離算出手段と、第2移動体に設けられ、前記衛星からの信号の受信結果に基づいて該衛星と該第2移動体との間の擬似距離を算出する第2移動体側擬似距離算出手段と、前記第1移動体及び前記第2移動体のうちの少なくとも一方の移動体に設けられ、前記第1移動体と前記第2移動体との間の距離を算出する手段と、前記算出された衛星と第2移動体との間の擬似距離、及び、前記算出された第1移動体と前記第2移動体との間の距離を用いて、前記第1移動体と衛星との間の擬似距離を算出する第2擬似距離算出手段と、前記第1及び第2擬似距離算出手段によりそれぞれ算出された擬似距離を結合して、1つの結合擬似距離を算出する結合擬似距離算出手段と、該結合擬似距離算出手段により算出された前記結合擬似距離を用いて前記第1移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
測位用データ生成装置、受信装置、プログラム、測位システム、及び測位方法
【課題】GPS測位における複数の受信装置と測位装置との間の通信データ量を削減する。
【解決手段】測位用データ生成装置は、GPS受信機から出力される観測データに含まれる、衛星からの電波の受信時間と、衛星を識別する衛星IDと、電波の搬送波位相の小数部とを抽出し、抽出された受信時間、衛星ID、及び搬送波位相の小数部を含んで構成される測位用データを生成する測位用データ生成部と、測位用データ生成部によって生成された測位用データを、受信時間、衛星ID、及び搬送波位相の小数部に基づいて複数のGPS受信機間の相対位置関係を測定可能な測位装置に、無線通信装置を介して送信する測位用データ送信部と、を備える。
(もっと読む)
衛星/レーザ測位システムにおいて高さ座標を正確に決定するための方法および装置
【課題】受信した衛星信号および受信したレーザ信号から位置座標を生成することが可能な衛星/レーザ測位システムにおいて信号を処理するための方法および装置を提供すること。
【解決手段】レーザ信号が利用可能である期間中は、高さ座標バイアス値がフィルタ・プロセッサによって維持される。高さ座標バイアス値は、衛星信号から導出された高さ座標とレーザ信号から導出された高さ座標との間の推定差を表す。レーザ信号が利用可能である期間中は、レーザ信号から導出された高さ座標が出力される。レーザ信号が利用できない期間中は、高さ座標バイアス値を衛星信号から導出された高さ座標に加えることによって、補正された高さ座標値が生成される。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
101 - 120 / 252
[ Back to top ]