
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
161 - 180 / 252
測位システムおよび端末

【課題】GPS測位において、個々の衛星が配信する補正情報の量を増やさずに、端末での補正の精度を向上させること。
【解決手段】本発明に係るGPS補正情報配信システム100では、複数の補完衛星51〜53から端末60に、地理的あるいは時間的に補完関係を有する補正情報を配信する。これにより、個々の補完衛星が配信する補正情報の量を増やさずに、端末60におけるGPS測位の補正の精度を向上させることができる。
(もっと読む)
エレベーターの管制運転装置

【課題】地震発生時等のビルの振幅状態を精度よく把握し、振幅が大きい時は運行中のエレベーターに対し管制運転指令を行い、乗客とエレベーターの安全を図る。
【解決手段】基準点であるGPS受信機11はビルに配置され、それに接続されている受信装置12はビルの位置情報からビルの変位を求め、処理装置13aに伝達する。処理装置13aはビルの変位データが示すビル変位が予め設定された値を超えると、エレベーター制御装置14に対し、管制運転を行うように指令する。
(もっと読む)
施工管理システムおよび施工管理方法
【課題】通信可能距離の短い小電力無線を利用しながら、広範囲の施工エリアを無線通信可能とし、該施工エリア内における重機の位置を高精度に特定することのできる施工管理システムおよび施工管理方法を提供する。
【解決手段】GPS信号を受信するとともに無線LAN通信が可能な固定基準局1と、複数の無線LAN用アクセスポイント2A〜2Fとから施工管理システム10が構成されている。無線LAN用アクセスポイントの通信可能エリア同士はラップするように配置されており、複数の無線LAN用アクセスポイントから構成される通信可能エリアが建設工事エリアを包含し、建設工事エリア内においてGPS信号受信装置および無線LAN送受信機を備えた重機3と固定基準局1との間で無線LANによる通信がおこなわれる。
(もっと読む)
姿勢標定装置、姿勢標定方法および姿勢標定プログラム
【課題】姿勢角の標定処理において、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にする。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を迅速に得ることができる補正係数演算装置を得る。
【解決手段】距離補正係数の演算に使用する2つのGPS情報であるGPS情報対に関し、移動距離に基づく評価を実行し、移動距離が大きい情報ほど演算に使用する頻度を高くする。
(もっと読む)
現在位置表示方法および現在位置表示装置
【課題】携帯式端末等にてより正確な位置情報の修正を行うこと目的とする。
【解決手段】 受信部17と、位置検出部11と、地図データ取得部14と、位置情報が入力可能な操作部15と、位置記憶部12と、位置情報と周辺地図データとを画面上に表示するための制御を行う制御部13と、その情報を画面上に表示する表示部16とを備えた現在位置表示端末であって、位置記憶部12は、位置検出部11にて検出された検出現在位置情報と、操作部15に入力された修正現在位置情報、および、前記検出現在位置情報と前記修正現在位置情報とから算出される相対的な誤差情報とを記憶し、制御部13は、検出現在位置情報と、修正現在位置情報のいずれか一方、または両方を同時に表示することを特徴とする。
(もっと読む)
作業機械の位置計測システム
【課題】作業機械の位置計測システムにおいて、作業機械の3次元空間での位置と姿勢及びモニタポイントの絶対位置を演算、表示する際に、車体が静止した状態にあるときは表示のふらつきを低減し、車体が静止した状態にないときは表示の追従性の低下を抑え、ひいては作業効率を向上させる。
【解決手段】GPSアンテナ31,32の3次元位置に基づいて上部旋回体3の位置及び姿勢をグローバル座標系の値で求め、この値のローパスフィルタリング処理を行う。このとき、油圧ショベル1が旋回又は走行をしている場合は、ノイズ成分除去のための高いカットオフ周波数で、そうでない場合は、表示の変動を抑えるための低いカットオフ周波数でローパスフィルタリング処理を行う。この演算値を元に、モニタに地形に対する油圧ショベル1の位置関係を重ね合わせて表示する。
(もっと読む)
キャリア位相相対測位装置
【課題】長基線の場合であっても高精度に整数バイアスを決定することができるキャリア位相相対測位装置を提供することを目的とする。
【解決手段】測位演算部31において、位相差観測量から基線ベクトルと電離層遅延量の時間更新を生成し、該生成した時間更新、位相差演算部31から得られる位相差観測量、及びGPS受信機201から得られる衛星情報を用いて、基準周波数に対する整数バイアス、ワイドレーン信号に対する整数バイアス、基線ベクトル、及び電離層遅延を推定する。これにより、電離層遅延誤差の影響を除去して整数バイアス及び基線ベクトルを求めることができる。また、他の方法として、ワイドレーン信号に対する整数バイアスを決定後、これを既知情報として、基準周波数に対する整数バイアス、基線ベクトル、及び電離層遅延を推定することも可能である。
(もっと読む)
測量方法
【課題】GPS測位される測量データを行政上の公的測量データに合致した公的座標値により表示できるようにした測量方法を提供する。
【解決手段】過去に確定された座標に対応する座標値を公的座標値とし、GPS手段によりリアルタイムで測位される座標に対応する座標値を観測座標値とする構成であって、各地点に関して公的座標値と観測座標値を有する位置変動情報を備えた多数の固定基準点に対して、目的地に応じて移動する移動局(6)により目標測量地点(o)をGPS測位する測量方法であり、目標測量地点(o)を囲む固定基準点の位置変動情報を利用することにより、測位された目標測量地点(o)を公的座標値で表す構成である。
(もっと読む)
測位装置、測位演算機及び測位演算方法
【課題】 XOのような廉価なクロックを内部クロックに用いた測位装置においても、簡易に、精度の高い測位結果を得ることを目的とする。
【解決手段】 測位衛星に搭載されたクロックと同期したクロックを具えた信号受信部が複数の測位衛星から受信した測位信号を処理して出力する擬似距離と航法メッセージとデータ受信時刻とを含む測位情報を用いて位置を演算する測位演算機であって、測位演算により取得したクロック誤差を用いてデータ受信時刻を補正し出力する時刻補正部と、補正したデータ受信時刻を入力して測位衛星の位置を演算して出力する衛星位置計算部と、補正した衛星位置と擬似距離とを入力して、位置を再度計算して出力する測位計算部とを備えた。
(もっと読む)
キャリア位相相対測位装置
【課題】整数バイアスのフロート解を高速且つ高精度に推定できるとともに、整数バイアス解決定後の基線ベクトルの推定処理を高速且つ高精度に算出できるキャリア位相相対測位装置を提供することを目的とする。
【解決手段】 整数バイアスフロート解推定部11による整数バイアスのフロート解の推定演算及び基線ベクトル算出部14による基線ベクトルの算出演算を、GPSアンテナ間の相対的な位置関係より得られる既知情報の制約条件の下で行う。この既知情報制約付きの条件下での具体的な演算技法としては、ラグランジェ乗数(Lagrange multiplier)や拡張カルマンフィルタによる方法がある。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 精度の高い擬似距離を選択して測位計算できるようにする。
【解決手段】 測位装置10は、GPS受信機2と赤外線カメラ7と画像処理機8と慣性装置4と観測データフィルタ5と航法計算装置6とを備えて測位計算を行う。観測データフィルタ5は、GPS受信機2から各衛星に対する擬似距離と衛星位置とを入力し、さらに、画像処理機8から赤外線カメラ7で撮像した全周囲の建物を仰角・方位角で表した撮像データを取得する。次に、自己位置と衛星位置と建物との位置関係に基づいて各衛星からの測位信号が直接波か反射波か判定する。そして、直接波である測位信号から求めた擬似距離を測位計算に使用する擬似距離として出力する。また、反射波に対して測位計算における重みを設定して出力する。航法計算装置6は、観測データフィルタ5が出力した擬似距離および擬似距離の重みに基づいて測位計算を行う。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置
【課題】 測位に使用する補正データのデータ送信量を低減し、また、送信する補正データの精度を向上させるデータ送信装置の提供を目的とする。
【解決手段】 この発明のデータ送信装置は、電子基準点から電子基準点情報を収集する源泉データ収集処理部102と、収集した電子基準点情報を使用することにより、基準点固有誤差を複数の電子基準点につき計算する第1計算部103と、地域データに複数のグリッド(位置表示点)を設定し、設定した複数のグリッドに対し、電子基準点につき計算した基準点固有誤差に基づき表示点固有誤差データを計算し、複数の表示点固有誤差データを送信対象データとして出力する第2計算部104と、送信対象データに含まれる少なくともいずれかの表示点固有誤差データのデータ形式を変更するデータ形式変更部1042と、データ形式が変更された表示点固有誤差データを含む送信対象データを送信するデータ送信部106とを備えた。
(もっと読む)
他車両位置検出装置
【課題】 他車両の位置をすばやく検出することができる他車両位置検出装置を提供する。
【解決手段】 通信部1を介して受信した自車両におけるGPS座標と、マップマッチングによって算出された自車両における補正後の位置座標との差をGPS誤差として算出し、該GPS誤差を用いて、他車両から取得したGPS座標の補正を行うことによって他車両の正確な位置を算出するものとしたので、他車両からGPS座標を取得すると、あらかじめ算出されたGPS誤差を用いて即座に他車両のGPS座標の補正を行い他車両の位置を検出することができる。
(もっと読む)
キャリア位相相対測位装置及び方法
【課題】
整数バイアス解の再決定時のみならず、電源投入直後における最初の整数バイアス解の決定時においても、移動体の姿勢情報を用いて整数バイアス候補解の検定を行うことができるキャリア位相相対測位装置及びその方法を提供することを目的とする。
【解決手段】
衛星から送信される測位用信号を受信するために、移動体上に固定された複数のアンテナ1と、加速度及び角速度を計測する慣性センサ3を備えたキャリア位相相対測位装置において、少なくとも最初の整数バイアス解の決定前に、慣性センサ3の観測量を用いて移動体の姿勢情報を算出する基準姿勢演算部6を設け、整数バイアス検定部7により、基準姿勢演算部6で算出した姿勢情報を用いて、整数バイアス推定部4で推定した整数バイアス候補解の検定を行うことを特徴とする。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法および装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法およびカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
整数解検定装置及び相対測位装置
【課題】 フロート解にバイアス誤差が含まれている場合でも、短時間で高精度に整数解を検定することができる整数解検定装置を得ることを目的とする。
【解決手段】 フロート解a_hatが平均で、そのフロート解の誤差共分散行列Qa_hatが分散共分散行列である多次元正規分布の等確率楕円を求める等確率楕円特定部34と、残差が最も小さい整数解a1_barと、残差が2番目に小さい整数解a2_barとの境界面における接点a2_tildeを特定する接点特定部35とを設け、その接点特定部35により特定された接点a2_tildeを通る等確率楕円内の全確率に基づいて残差が最も小さい整数解a1_barを検定する。
(もっと読む)
直通通信モードで動作するピア間の位置特定を支援するための方法
位置決定(308)を実行するために衛星測位支援情報を必要とする、通信ネットワーク210のサービスエリア外の移動体通信装置(202)。移動体通信装置は、直接リンクを通じてピア移動体通信装置(204,206)から支援情報を受信する。 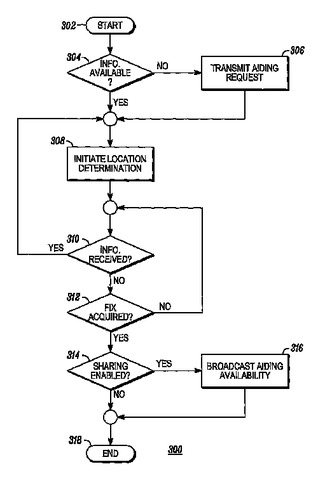 (もっと読む)
(もっと読む)
リアルタイムキネマティックGPSシステム
【課題】 リアルタイムキネマティックGPSシステムにおいて、基準局と移動局との通信が切断された際の測位誤差を減少させる。
【解決手段】 基準局201及び移動局211の各々が取得したリアルタイムキネマティック処理用GPSデータr1、r2に基づいて算出した移動局の第1の現在位置データrtk1と、移動局が単独で算出した第2の現在位置データgps1との差異を補正値Hとして取得する補正値取得手段217と、基準局と移動局との間の通信が可能な場合には、第1の現在位置データを移動局の現在位置データとし、基準局と移動局との間の通信が不可能な場合には、第2の現在位置データと、補正値取得手段が取得した補正値とに基づいて、移動局の現在位置データを算出するように切り替える補正切り替え手段218とを備えるGPSシステム。補正値取得手段等は、各々の移動局又は基準局に設けることができる。
(もっと読む)
測位システム
【課題】差分補強情報とその誤差を正確に算出できるようにし、移動体における測位精度の向上を図った測位システムを提供すること。
【解決手段】各衛星信号受信機211〜21n、各衛星11〜1kの対流圏遅延量と電離層遅延量和を算出する際、各衛星信号受信機211〜21nで重みを考慮した最小二乗法による単独測位を行う。その値を元に衛星信号受信機211〜21nごとに例えば95%の範囲を求め、受信機相互に重なりのあるデータのみを有効なデータとして採用する。さらに、ある衛星の有効な衛星信号受信機のデータについて、対流圏遅延量と電離層遅延量和の平均を求め、或る衛星の対流圏遅延量と電離層遅延量との和が平均からのずれ量を、衛星信号受信機211〜21nごとに計算する。そして平均からのずれを各衛星信号受信機211〜21nの誤差情報とする。
(もっと読む)
161 - 180 / 252
[ Back to top ]