
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
141 - 160 / 252
地域的、広域、又は大域的キャリア位相差ナビゲーション(WADGPS)からローカル・リアル・タイム力学的(RTK)ナビゲーション・システムに移行するときに、位置情報の信頼性を高める方法
【課題】本発明は、ローカル測位システムと、ローカルRTKシステムと、地域、広域、又は大域差動搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、ローカル測位システム、RTK及びWADGPSナビゲーション技術を別個に使用すると随伴する短所を回避する。本方法は、WADGPSからの情報に基づいて、前記対象の第1位置を判定し、ローカル測位/RTK測位システムからの位置情報に基づいて対象の第2位置を判定するステップを含む。その後、WADGPSによって判定した位置と、ローカル測位/RTK測位システムによって判定した位置とを比較する。WADGPS位置及びローカル測位/位置に既定の閾値を超える差がある場合、対象をナビゲートするためにWADGPS位置を用い、WADGPS位置及びローカル測位/RTK位置に既定の閾値未満の差がある場合、対象をナビゲートするためにローカル測位/RTK位置を用いる。 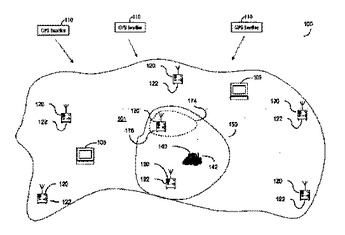 (もっと読む)
(もっと読む)
測位装置
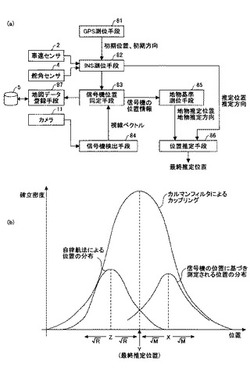
【課題】自律航法による測位結果を修正してより精度よく移動体の位置を測位する測位装置を提供すること。
【解決手段】地図データを記憶した地図データ記憶手段5と、移動体の挙動情報を検出する自律センサ2、3)と、GPS等の電波航法測位手段による測位結果に自律センサによる検出情報を累積して移動体の推定位置を検出する慣性測位手段82と、道路周辺の地物を検出する地物検出手段84と、地物の位置を同定する地物位置同定手段83と、地物の位置を基準に移動体の地物推定位置を推定する地物基準測位手段85と、推定位置及び地物推定位置をカルマンフィルタに適用して移動体の位置を推定する位置推定手段86と、を有することを特徴とする測位装置9を提供する。
(もっと読む)
GPS測位データの誤認識判別方法および誤認識判別装置

【課題】測位データに跳躍現象が発生した場合でも、跳躍による誤認識を判別し得るGPS測位データの誤認識判別方法を提供する。
【解決手段】RTK方式によるGPS受信機1で得られた測位精度データを順次入力してフィックス解よりも精度が低いか否かを判断し、フィックス解よりも精度が低いと判断された場合に、GPS受信機で得られた測位データが誤認識データである可能性を示す誤認識フラグを立て、そして引き続き入力される測位精度データがフィックス解であると判断された場合で且つ誤認識フラグが立っている場合に、当該誤認識フラグが立つ以前におけるフィックス解状態の測位データを用いて、現在の測位データが誤認識データであるか否かの判別を行うようにした方法である。
(もっと読む)
路側装置、端末装置およびDGPS測位システム
【課題】 マルチパス誤差を考慮したGPS測位を実現する。
【解決手段】 路側装置2を道路近くの既知の位置に設置するとともに、この路側装置2が、GPS衛星1からの電波を受信してGPS衛星1との間の第1の擬似距離d6およびGPS衛星1の第1の航法データd1を出力する第1のGPS受信機21、第1の航法データd1を用いて計算したGPS衛星1の位置d5と路側装置2の設置位置との間の直線距離および第1の擬似距離d2に基づき擬似距離誤差d6を求める擬似距離誤差計算部222と、擬似距離誤差d6に基づく補正データ5を生成する補正データ生成部223とを有する制御装置22、補正データ5を端末装置3に送信する通信機23を備えたことを特徴とする。
(もっと読む)
不動物位置記録装置
【課題】道路周辺の不動物に関する高精度な測位データを簡単に収集することが可能な装置を低コストで実現すること。
【解決手段】不動物位置記録装置100は、自車両の絶対位置を取得する自車両位置取得装置110(GPS受信装置)と、走行中の道路周辺における物体の位置情報を取得する環境特徴取得装置120(測位装置)と、検出された環境特徴から自車両の運動(速度ベクトルやヨー角速度など)を推定する自車両運動推定部140と、推定された自車両運動および自車両の絶対位置に基づいて、道路周辺の不動物の絶対位置を推定して出力する不動物位置推定部130を有している。更に、不動物位置推定部130は、自車両取得位置評価部131と不動物位置評価部132から構成されている。また、自車両運動推定部140は、環境特徴評価部141と自車両運動評価部142から構成されている。
(もっと読む)
衛星による測位システムの用に供される基準点のネットワークにおけるネットワーク特異的変数の計算法
本発明は、(a)基準点としての受信ユニットのネットワークを前記基準点からなる複数のグループに分割するステップと、(b)前記グループ特異的補正変数を計算するステップと、(c)前記グループ特異的補正変数の組み合わせを求めるステップと、(d)前記ネットワーク特異的補正パラメータを導くステップと、を含む、前記ネットワークを有する衛星測位システムの用に供される、補正計算法を提供する。前記ステップ(a)は、(イ)前記基準点を、エッジ重み付接続グラフにおけるノードとして表し、そして、前記エッジでつながれた前記ノードの除去が発生した場合に、前記除去の発生を重み付関数に入力し、(ロ)前記グラフから、特に、プリムまたはクラスカルアルゴリズムに基づいて、最小全域木を導き、そして、(ハ)前記グループを確立するために、各々の場合において最大の重みを有する前記エッジを前記最小全域木から除去することによって、前記最小全域木を分割することを含む。前記(ハ)において、前記エッジを除去することによって、(i)前記分割の結果得た全ての部分木が、ノードの数に関する濃度条件、特に、下限値nmin、および、上限値nmaxを有する濃度条件を満たす部分木を生成し、または、(ii)ノード数が前記濃度条件を上回るような部分木を生成することを特徴とする。 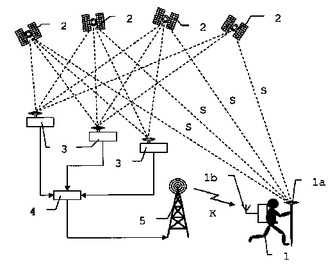 (もっと読む)
(もっと読む)
リアルタイムキネマティックGPSシステム
【課題】リアルタイムキネマティックGPSシステムにおいて、基準局と移動局との間が長時間通信不能となった場合でも高い測位精度を維持する。
【解決手段】基準局301及び移動局311の各々が取得したRTK−GPSシステム処理用GPSデータに基づいて算出された移動局の第1の現在位置データと、移動局が単独で算出した第2の現在位置データとの差異を補正値として取得する補正値取得手段315と、補正値取得手段が取得した所定時間分の補正値を記憶する補正値記憶手段315と、基準局と移動局との間の通信が可能な場合には、第1の現在位置データを移動局の現在位置データとし、基準局と移動局との間の通信が不可能な場合には、補正値記憶手段が記憶する過去の補正値と、第2の現在位置データとに基づいて、移動局の現在位置データを算出するように切り替える補正切り替え手段314とを備えるシステム。
(もっと読む)
相対測位をサポートする方法
本発明は、少なくとも1つの第1GNSS受信機から衛星信号上の少なくとも1つのデータセットを受信し、各受信データセットは特定時刻に関連していることを含む方法に関する。この方法は、少なくとも1つの受信データセットに基づいて、各追加時刻に関連する少なくとも1つの追加データセットのためのデータを推定することをさらに含む。この方法は、少なくとも1つの第1GNSS受信機22の位置と相対的な少なくとも1つの第2GNSS受信機12の位置を決定するために、少なくとも1つの受信データセットからのデータに加えて、少なくとも1つの追加データセットからのデータを提供することをさらに含む。 (もっと読む)
GPS装置を位置決めするシステムおよび方法
GPS装置の正しい位置を、予め定められた選択すべき位置(8)のセットから決定するシステムと方法を提供する。このシステムは、目視可能なGPS衛星(1)および予め定められた代替え位置(8)の既知位置(2)に基づいて、各衛星と各位置との間の理論的距離(10)および/またはその距離の差を決定する。これらの距離は、予め定められた代替え位置のなかから正しい位置を選択するための、GPS装置のアンテナと各GPS衛星の間の距離の測定値に関連がある。貨物置場における予め定められたコンテナスロットを識別するシステムおよび方法も開示される。  (もっと読む)
(もっと読む)
多数のセグメントからなる物理的構造の寸法の不変性を組立の間に確保するための方法
本発明は、多数のセグメントからなる物理的構造、特に航空機構造の寸法の不変性を組立の間に確保するための方法に関する。この方法は、以下の工程を有する。後に組み立てられる物理構造を収める空間的に固定された3次元の座標系(90)が構成され、組み立てられる前記物理構造の複数のセグメント(31,32,33)が前記空間的に固定された3次元の座標系(90)に導入され、前記空間的に固定された3次元の座標系(90)内での個々の前記セグメント(31,32,33)の位置及び既に組み立てられたセグメント(31,32,33)のグループの位置が組立の間に繰り返し記録され、そして、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が、所望の寸法の不変性に従って夫々の所定の公称値によって予め決定された許容誤差幅の外にあることを夫々の記録が示すならば、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が修正される。 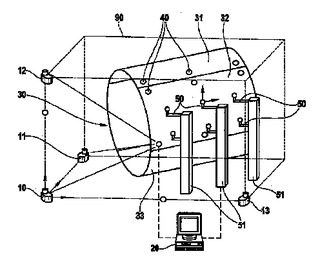 (もっと読む)
(もっと読む)
RTK−GPS測位システム
【課題】専用回線の物理的敷設を行うことなく不正アクセスを防止しつつかつ複数個の移動局から同時に1個の固定局にアクセスすることができ、このアクセスが可能な場合であっても、グループが異なる場合にはそのアクセスを禁止する。
【解決手段】IP−VPN通信ネットワーク網に、補正データを送信する少なくとも1個の固定局と、補正データを受信する移動局と、サーバ9が設けられ、移動局は、人工衛星からの電波を受信する衛星測位部11と、各衛星測位手段との間での通信を行う通信部12と、衛星測位部11と通信部12との制御を行う制御部13とを少なくとも備え、各通信部12には各衛星測位手段毎にそれぞれ固有のIDが割り当てられ、サーバ9には各通信部12の固有のIDが各衛星測位手段毎に登録され、サーバ9は、このサーバ9に登録されている固有のIDと各衛星測位手段に登録されている固有のIDとを照合して、ネットワーク網にログインを許可する。
(もっと読む)
衛星の天体暦誤差
衛星の天体暦誤差を補償または補正する方法は、様々な地理的位置における較正送信機(42a〜42d)から2機の衛星(34、46)を介して受信される信号レプリカの到達時間差(TDOA)および到達周波数差(FDOA)を測定するステップを含む。TDOAおよびFDOAの測定値に最良適合するTDOAおよびFDOAの推定値を与える天体暦変化を計算するために、位置ベクトルと速度ベクトルからなる初期衛星天体暦が使用される。これは、初期衛星天体暦の誤差を補償または補正するために必要な推定変化を提供する。この方法は、大きい天体暦変化を処理するために反復されてもよい。すなわち、1回の反復で得られる変化は、次の反復において新たな初期天体暦として使用される天体暦を補正するために使用されてもよい。この方法は、1機または2機の衛星の天体暦誤差を補正するために使用されてもよく、そうであれば、さらに多くの較正送信機EphemCal 1〜EphemCal 10が使用されてもよい。  (もっと読む)
(もっと読む)
建造物健全性判定システム
【課題】GPSを利用して被測定建造物の健全性を判定することができる建造物健全性判定システムを提供する。
【解決手段】この建造物健全性判定システム10は、ビルの屋上に設置されたGPSアンテナ12A〜12DおよびGPS受信機13と、GPS受信機13がGPS衛星から受信した観測データに基づいてGPSアンテナ12A〜12D間の基線ベクトル15A〜15Eを算出するコンピュータ14とを備えている。コンピュータ14は、基線ベクトル15A〜15Eによって画成された基準三角形と実測三角形との比較要素の相違点を用いてビルの残留変形を測定する。
(もっと読む)
測位計算装置
【課題】移動局GPS受信機が地上に固定されていない条件で、安定かつ高精度な測位座標を得ることを課題とする。
【解決手段】複数のGPS衛星とGPS受信機との間で測定されたコード擬似距離測定値と搬送波位相測定値とを用いて測位座標を計算する測位計算装置であって、基準局搬送波位相測定値および移動局搬送波位相測定値の入力を受け付け、基準局搬送波位相測定値と移動局搬送波位相測定値との測定値差分量を計算し、測定値差分量を用いて、測定値残差の時系列に対して濾過平滑化を行って濾過平滑化測定値残差を計算し、搬送波位相バイアス量の時系列に対して濾過平滑化を行って濾過平滑化搬送波位相バイアス量を計算し、濾過平滑化測定値残差と、濾過平滑化搬送波位相バイアス量とを用いて、複数のエポックに対して測位座標の濾過平滑化された推定値を計算し出力する。
(もっと読む)
情報処理装置及び補正値複合方法及びプログラム
【課題】差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】補正値生成局200において、基準局通信局210は各基準局100から観測値を収集する。生成局220は各基準局100の観測値を基に各基準局100の補正値を生成する。さらに複数種設定した基準局の組合せに対して、その組合せ内で各基準局の補正値を比較して基準局に依存する異常値を検出し除去する。さらに生成局220は、異常値が除去された補正値をその組合せ内で複合して高品質な複合補正値を生成する。移動局300または補正値生成局200は、移動局300の概略位置を囲むような基準局の組合せを抽出する。その組合せリストの中から、過去にその移動局300に対して配信した複合補正値の基準局組合せと比較して閾値以下の数だけ異なる基準局組合せを選択する。その複合補正値を移動局300に配信する。
(もっと読む)
情報処理装置及び通信システム及び移動体誘導方法及びプログラム
【課題】無人航空機を自律的に誘導・回収する装置を得る。
【解決手段】GPS衛星15からの測位信号は、GPSアンテナ6とGPSアンテナ7でほぼ同時に受信される。気球3上のGPS受信部10から得られる擬似距離データ及び搬送波位相データは、送信部12により送信され、機体1上の受信部11によって受信される。相対航法計算部13は、受信部11により受信された気球3における擬似距離データ及び搬送波位相データとGPS受信部9から得られる機体1における擬似距離データ及び搬送波位相データを併せて相対航法演算を行い、気球3に対する機体1の相対位置及び相対速度を算出する。相対位置及び相対速度のデータは、誘導制御計算部14に送られ、この誘導制御計算部14によってケーブル2へ機体1を衝突させるための誘導制御量算出が行われる。誘導制御計算部14によって誘導された機体1はケーブル2へ衝突することで減速し、回収される。
(もっと読む)
移動体の横滑り計測装置
【課題】
本発明は、移動体の横滑りを高精度に計測する装置に関するものである。
【解決手段】移動体の横滑り角は、移動体上の前後に取り付けられた測位用衛星受信アンテナで受信した信号から算出する後のアンテナに対する前のアンテナの方向(前方方向)とアンテナの進行方方向から算出する。
(もっと読む)
地質の動きを評価するシステムおよび方法
【課題】地質事象に起因する過渡現象を監視および追跡するシステムおよび方法を提供する。
【解決手段】一実施形態では地質事象監視システムを提供する。このシステムは、複数の地質活動センサを有するセンサ・アレイと中央監視システムとを備え、地質活動センサは、1以上の地球周回軌道衛星から測位信号を受信するように、かつ、少なくとも1つの基準局から分解能向上信号を受信するように、かつ、運動活動を測定するように構成されており、中央監視システムは、センサ・アレイと通信するように構成されている。センサ・アレイは、複数の位置で運動活動を測定し、その複数の位置での運動活動を特徴付けるタイム・スタンプ付きデータを中央監視システムへ送信し、中央監視システムは、タイム・スタンプ付きデータを相関させ、経時的に複数の地質活動センサが遭遇した動きおよび慣性力を追跡するように更に構成される。
(もっと読む)
屋内における高精度位置基準測定のための方法及び装置
本発明は、実用的な高精度屋内測位結果の生成を実現する。測位サーバは通常のユーザが自身の携帯電話を用いて接続することのできるインタフェースを提供する。このインタフェースを用い、ユーザは、セルラオペレータが高精度位置基準測定の実行を希望する複数の屋内位置から1つを選択することができる。ユーザはその屋内位置に移動し、上述のインタフェースを操作して基準測定をその場所で開始する。ユーザのID又は測位時刻のログを取ることにより、選択された屋内位置をRANで決定されたタグと相互に関連付けることが可能である。タグと、測位サーバへ向かうインタフェースを用いて選択されている屋内位置とは、1つのタグづけされた高精度測位結果を構成する。 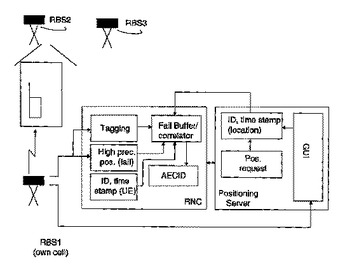 (もっと読む)
(もっと読む)
ローカル測位システム、ローカルRTKシステム、及び地域的、広帯域、又は大域搬送波位相測位システムを組み合わせて用いる方法
本発明は、ローカル測位システム(174)と、ローカルRTKシステム(150)と、地域、広域、又は大域差動搬送波位相測位システム(100)(WADGPS)を組み合わせて利用する方法を含んでおり、ローカル測位システム(174)、RTK(150)及びWADGPS(100)ナビゲーション技術を別個に使用すると随伴する短所を回避する。本方法には、静止しているユーザ受信機(142)の既知の位置を用いるか、あるいはユーザ受信機(142)が移動中である場合、RTKシステム(150)を用いてWADGPSシステム(100)における浮動曖昧値を初期化することを含む。その後、ユーザGPS受信機(142)において入手した屈折補正搬送波位相測定値が、対応する初期浮動曖昧値を含めることによって調整され、後続のプロセスにおいて浮動曖昧値が周知(分散が小さい)であるように扱われ、WADGPSシステム(100)内でユーザ受信機(142)を測位する。 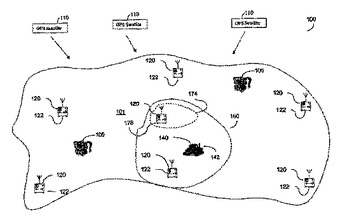 (もっと読む)
(もっと読む)
141 - 160 / 252
[ Back to top ]