
Fターム[5J062EE04]の内容
Fターム[5J062EE04]に分類される特許
41 - 60 / 252
施設内ナビゲーションシステム
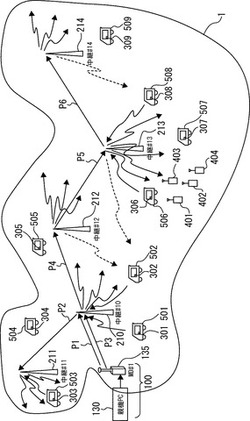
【課題】 短時間で通信を行う施設内ナビゲーションシステムを提供する。
【解決手段】 ゴルフ場1内のクラブハウスに設置される親機100と、カート501〜509に搭載されるカート機301〜309及びプレーヤが携行する携帯機401〜404とは、GHz帯域の特定小電力無線により通信する。短距離通信を中継するために、ゴルフ場1内には、中継器210〜214が設置される。親機100及び中継器210〜214の間の中継通信と、中継器210〜214とカート機501〜509及び携帯機401〜404との間の同報通信とは、互いに周波数の異なる特定小電力無線を使用する。同一中継器の中継通信と同報通信とは時期を異ならせて行われる一方、ある中継器と別の中継器との間では、中継通信と同報通信とが同一時期に行われる。
(もっと読む)
方位決定装置及び方法及びプログラム、位置算出装置及び方法及びプログラム、並びに、電子機器

【課題】GPS電波の受信状況が良好でない場合であっても、方位を高精度に決定することが可能な方位決定装置等を提供する。
【解決手段】GPS衛星からの電波を受信するGPSアンテナ11a、11bと、位置を算出するGPSユニット12a、12bと、地磁気に基づいて第1の方位を検出する電子コンパス13と、GPSユニット12a、12bによって算出された位置に基づいて第2の方位を算出し、第1の方位と第2の方位とを比較し、第1の方位と第2の方位とが一致する場合には、第1の方位及び/又は第2の方位を現在の方位として決定し、第1の方位と第2の方位とが不一致の場合には、第1の方位を現在の方位として決定するホストCPU14と、を含む。
(もっと読む)
GPSによる位置計測装置および位置計測方法
【課題】RTK法によるフィックス解が異常値になっている場合には、その異常値を除去し得るGPSによる位置計測方法を提供する。
【解決手段】基準局1及び観測局2で得られた測距データをそれぞれ4個の解演算部12に入力するとともに、これら各解演算部12にて、RTK法を用いて、観測局におけるフィックス解などのRTK解を演算し、これらのRTK解を解取得部13に入力し、ここでフィックス解の個数が複数であるか否かを判断するとともに、フィックス解が複数であると判断された場合にこれら各フィックス解同士の偏差を求め、そして全ての偏差が許容値以下であるか否かを判断するとともに、許容値以下であると判断された場合にこれらのフィックス解に所定の演算処理を施して正常なフィックス解を取得し、且つ上記各解演算部を所定時間おきにずらせて順次再起動させる方法である。
(もっと読む)
測位装置、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、コンピュータプログラム及び測位方法を提供する。
【解決手段】衛星用通信部12は、各衛星との擬似距離を測定するコード位相測定部121、各衛星の搬送波の位相を測定する搬送波位相測定部122、各衛星の搬送波の周波数を測定する搬送波周波数測定部123などを備えている。処理部11は、各衛星の搬送波の周波数を測定してドップラーシフトを求めることにより、測位対象100の速度ベクトルを算出する。処理部11は、測位前の測位対象100の位置をAとし、速度ベクトルをVとし、速度ベクトル算出の時間間隔をTとすると、解の探索範囲の中心Bを、B=A+T・Vにより求め、解の探索範囲を制限してアンビギュイティを決定する。
(もっと読む)
移動体用測位システム及びGNSS受信装置
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行う移動体用測位システムは、基準局と移動体とを有する。基準局は、固定位置に配置され、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて補正データを生成する手段と、補正データを移動体に送信する手段とを有する。移動体は、基準局から送信される補正データを受信する手段と、該移動体で観測して得られる衛星電波の観測データと、受信した補正データとに基づいて、該移動体の位置を測位する測位手段とを有する。
(もっと読む)
測位方法および測位装置
【課題】高精度に位置特定を行うことができるようにする。
【解決手段】基地局がGPS衛星から受信したGPS信号に基づいて算出された補正値をGPS衛星の仰角値と対応付けて配信し(S1〜S3)、移動局側では、GPS衛星から移動局が受信したGPS信号に基づいて移動局が受信したGPS衛星についての仰角値を算出した仰角算出値に近い補正値を適用して測位する(T6〜T9)。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
測位装置、測位方法及び測位プログラム
【課題】GPS等の測位衛星が送信する信号の搬送波位相を利用して受信機位置を計測する測位装置において、搬送波位相距離の波数の収束計算を短縮するとともに、高精度化することを目的とする。
【解決手段】搬送波位相距離の波数の決定が容易な擬似距離などの観測量だけでなく、既に決定している搬送波位相距離の波数である整数波数を入力として、未決定の搬送波位相距離の波数の推定量である実数波数推定量を計算する。また、実数波数推定量の計算とともに、位置推定量の計算を行う。計算した実数波数推定量に基づき、搬送波位相距離の波数を決定する。
(もっと読む)
補正値予測式推定方法、位置特定用補正値の算出方法、補正値予測式推定プログラムおよび位置特定用補正値算出プログラム
【課題】膨大な補正値を用いる必要なく高精度に位置特定できるようにする。
【解決手段】移動局は、単独で測位し(S1)、基準局に概略位置を送信する(S2)。基準局は、最も近い基準局を選択し補正値予測式を選択し(S3)、予測式の係数または補正値予測式を送信し、移動局は、送信された予測式の係数または補正値予測式を用いて測位計算する(S6)。
(もっと読む)
RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法
【課題】RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面の変位計測装置を提供する。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
(もっと読む)
移動体の位置検出装置、および位置検出装置を利用した車両制御装置
【課題】高精度で相対位置を測定すると共に相対位置に誤差が積算されることを防止することが可能な位置検出装置、および当該位置検出装置を利用した車両制御装置を提供する。
【解決手段】移動体の位置検出装置10は、複数のGPS衛星からのGPS信号を受信する受信アンテナ11と、各GPS信号の搬送波の位相を検出開始時刻から所定時間ごとに検出し、当該所定時間ごとの位相差を積算することにより、検出開始時刻からの位相変化量を演算する位相差積算部15と、位相差積算部により演算された位相変化量に基づいて、検出開始時刻における基準位置に対する相対位置を演算する相対位置演算部16と、を備える。
(もっと読む)
移動体用測位システム
【課題】基準局側で導出される速度補正データを用いて精度良く移動体の位置等を測位することができる移動体用測位システムの提供。
【解決手段】本発明による移動体用測位システムは、基準局20に設けられ、該基準局で観測して得られる衛星電波のドップラレンジに基づいて該基準局の速度を測位し、該測位結果に基づいて速度補正データを生成する補正データ生成手段50,52と、前記基準局に設けられ、該基準局で観測して得られる衛星電波の観測データと、前記速度補正データとを移動体に送信するデータ送信手段54と、前記移動体30に設けられ、前記基準局から送信される前記観測及び速度補正データを受信するデータ受信手段40と、前記移動体に設けられ、該移動体で観測して得られる衛星電波の観測データと、前記データ受信手段で受信した前記観測及び速度補正データとに基づいて、該移動体の位置を測位する測位手段42,44,46,48とを備えることを特徴とする。
(もっと読む)
移動体間干渉測位装置及び方法
【課題】移動体間干渉測位の精度の向上。
【解決手段】本発明による移動体間干渉測位装置は、第1移動体で観測された位相積算値に関する観測データを取得する第1観測データ取得手段と、第2移動体で観測された位相積算値に関する観測データを取得する第2観測データ取得手段と、干渉測位に用いる衛星のペアを決定する衛星ペア決定手段と、前記衛星ペア決定手段により決定されたペアの衛星間で、前記第1観測データ取得手段で取得された観測データと、前記第2観測データ取得手段で取得された観測データの一重位相差若しくは二重位相差を取り、該一重位相差若しくは二重位相差を取った観測データを用いて、干渉測位により前記第1移動体と前記第2移動体の間の相対位置関係を特定する干渉測位手段とを備えることを特徴とする。
(もっと読む)
移動体間干渉測位システム、装置及び方法
【課題】3台以上の移動体間の相対位置を効率的な測位処理で精度良く把握することができる移動体間干渉測位システム等の提供。
【解決手段】本発明は、互いに通信可能な3台以上の移動体で協動して測位を行う移動体間干渉測位システムであって、前記3台以上の移動体のうちから、基準車両として機能すべき一台の移動体を決定する基準車両決定手段と、前記基準車両決定手段により決定された基準車両として機能すべき移動体(以下、基準移動体という)に対する他の移動体のそれぞれの相対位置を、前記3台以上の移動体のそれぞれで観測される衛星電波の観測データを用いて、干渉測位する測位手段と、前記他の移動体の間の相対位置を、前記測位手段の測位結果を用いて特定することを特徴とする。
(もっと読む)
相対位置検知装置、及び相対位置検知システム
【課題】3台以上の移動体間の相対位置を干渉測位によって求めると共に、干渉測位に関する信頼性判定を効率的に行なうこと。
【解決手段】自己が搭載された移動体を含む3台以上の移動体が互いに通信可能な所定の場面において、基準移動体である場合には観測データ取得手段により取得された観測データを含むデータを非基準移動体に送信し、非基準移動体である場合には観測データ取得手段により取得された観測データ及び基準移動体から受信した観測データを含むデータを用いた干渉測位を行なって基準移動体との相対位置を算出すると共に、干渉測位の結果として算出される整数値バイアスを含むデータを他の非基準移動体に送信して干渉測位に関する信頼性判定結果を受信する処理と、他の非基準移動体から整数値バイアスを含むデータを受信して干渉測位に関する信頼性判定を行なう処理とのいずれか一方を行なう。
(もっと読む)
擬似距離評価システム及び擬似距離評価方法,プログラム
【課題】衛星測位システムでの測位計算の際にリアルタイムスムージング処理された擬似距離が異常値を示した場合に、この異常値の発生原因を迅速に特定する擬似距離評価システム及び擬似距離評価方法,擬似距離評価用プログラムを提供する。
【解決手段】測位計算に利用されるリアルタイムスムージング処理後の擬似距離から異常値を検出した場合に、この異常値と同一の観測時刻におけるポストプロセススムージング処理後の擬似距離が正常値であるか否か判定し、正常値であれば、検出した異常値の発生原因をリアルタイムスムージング処理の限界による残留ノイズであると判定するデータ処理部2を備えた。
(もっと読む)
GPS受信装置
【課題】自装置の位置の検出に要する時間を短縮すること。
【解決手段】自装置1Aから設定距離内にある他の携帯電話機1Bから衛星軌道情報および
捕捉衛星情報を無線通信を介して取得し、取得した衛星軌道情報および捕捉衛星情報に基
づいて自装置1Aの位置を検出するようにした。そのため、他の携帯電話機1Bから取得し
た情報に基づいて位置の検出処理を検出過程の続きから行うことができ、自装置1Aの位
置の検出に要する時間を短縮することができる。
(もっと読む)
航法データ更新通知システム及び方法
【課題】衛星航法補強システムに採用することにより、地上システムと機上システムとで使用する航法データを一致させて測位精度の悪化を回避して安全性を図る。
【解決手段】衛星から受信したレンジング信号に含まれる誤差を推定し、その誤差を修正するための補正情報をフォーマッティングして送信する地上システムと、前記測位衛星から受信したレンジング信号と、前記フォーマッティングされた補正情報とに基づいてディファレンシャルGPS測位演算し規定ルートからの変位を表示する機上システムとを有し、前記地上システムは、前記補正情報を生成する際に使用したSBAS航法データが更新された際に航法データの更新を前記補正情報に付加して通知する。前記機上システムは、前記送信される前記SBAS航法データ更新の通知を検出し、前記更新されたSBAS航法データに切り替えて前記ディファレンシャルGPS測位演算する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
41 - 60 / 252
[ Back to top ]