
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
401 - 420 / 1,238
車両用物体検知装置
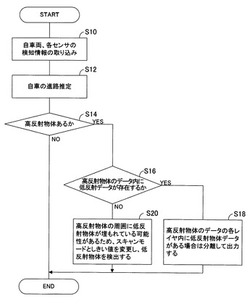
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
車両用物体検知装置

【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
障害物認識装置及び車両制御装置
【課題】車載カメラとミリ波レーダとのセンサ情報から取得するセンサ情報の組み合わせ精度を向上させて、より正確に障害物の認識をする障害物認識装置を提供する。
【解決手段】複数のセンサ情報を組み合わせて障害物の認識を行う障害物認識装置であって、障害物に関する第一パラメータ情報を取得する前方カメラ201と、障害物に関する第二パラメータ情報を取得するミリ波レーダ202と、前方カメラ201で取得した第一パラメータ情報とミリ波レーダ202で取得した第二パラメータ情報とに基づき、前方カメラ201又はミリ波レーダ202の方位角の軸ずれ量を算出し、算出された軸ずれ量に基づいて前方カメラ201又はミリ波レーダ202の軸ずれを補正する補正部203aと、軸ずれ量を記憶する記憶部203cとを備える。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
車両内の運転者支援システムのためのセンサ構成
本発明は、レーダセンサ(10)とビデオカメラ(14)とを備えた、車両内の運転者支援システムのためのセンサ構成であって、レーダセンサ(10)及びビデオカメラ(14)が共通のハウジングに組み込まれる、上記センサ構成に関する。 (もっと読む)
無線距離・速度計測装置
【課題】送信信号と復調用信号の中心周波数ずれや送信タイミングと復調用信号の生成タイミングのずれに起因する距離や相対速度の計測誤差をなくし、距離や相対速度の計測精度を向上させる。
【解決手段】FM−CW波の送信動作と受信動作を、送受信機10と送受信機20との間で交互に行い、受信側送受信機で、送信側送受信機の信号送信タイミングに同期させて復調用信号を発生させ受信信号を復調処理してビート信号を生成し、生成されたビート信号のビート周波数を検出し、両送受信機10、20で検出したビート周波数の検出結果を用いて、送受信機10と送受信機20との間の距離や相対速度を計測する。
(もっと読む)
レーダ装置
【課題】対象の速度を正確に計測するレーダ装置を提供する。
【解決手段】電波を送信して、対象の距離、角度と相対速度を計測するレーダ装置において、レーダの正対方向の法線方向をXとするとき、対象の移動方向を判定する対象移動方向判定手段と、前記対象移動方向判定手段の判定結果に基づき、対象の速度を算出する対象速度算出手段を有し、前記対象速度算出手段は、前記対象移動方向判定手段により、対象がX方向に移動していると判定された場合には、対象のX方向速度を、
(V - Vs*cosθ)/sinθ(ただし、θはレーダ装置の正対方向に対する対象の角度、Vはレ
ーダで計測された相対速度、Vsは自車の速度)
で算出する。
(もっと読む)
渋滞検知装置及びプログラム
【課題】 片側複数車線の道路における渋滞の発生有無を検知することが可能な1つのドップラー方式の検出センサを用いた渋滞検知装置の提供。
【解決手段】 片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析した結果に基づいて、車両の速度を算出するための周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定する。すなわち、特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、片側複数車線の道路における渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させる際に水流に電波をぶつけるように導波管を水路配管の下側に配置したため、吐水口下方の電波強度が向上するために、吐水中に水流の下側の方で水を使われる場合においても検知精度を確保できるため、使用中に誤って止水することのない、使い勝手のよい水栓装置を提供することができる。
(もっと読む)
レーダ装置及びそれを用いた電波到来方向の計測方法
【課題】レーダの検出視野内に複数の物体が存在し、それらによる反射波のドップラー周波数が同一となる状況でも、各ターゲットの方位を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】レーダで観測されるドップラー信号を、同一のドップラー周波数を発生させるターゲットごとに分類し、レーダとターゲットとの相対的な位置関係が異なる時刻の反射波のデータを平均化した相関行列を作成し、前記相関行列を用いてレーダ受信器の受信強度パターンの方位角依存性を変化させることによって、ターゲットの方位を計測するレーダ装置。
(もっと読む)
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
(もっと読む)
多周波ドップラー装置
【課題】 多周波ドップラー装置の高周波回路モジュールの小型化、低コスト化を図る。
【解決手段】 送受信に共用するアンテナ17のフロントエンド部に非線形特性を持つダイオード21と、ダイオード21の出力端にそれぞれ接続したフィルタ23及びオープンスタブ(Open stub)22よりなる周波数変換部を有し、フィルタ23の出力側をドップラー信号dの出力端子とする。この構成により、ドップラー信号を出力する従来の回路モジュールに設けた分配器を持たず、かつ電力レベルを低下させないために設けた増幅器等の他の高周波回路コンポーネントを必要としない簡素な回路構成で小型化を実現する。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させる際に水流のみの状態と、水流に対して被洗浄物が干渉して飛散水が発生したときの状態との差を速度成分として抽出するために、導波管と水路配管を併設させたため、水栓装置を利用している際の検知精度を確保でき、使用中に誤って止水することのない、使い勝手のよい水栓装置を提供することができる。
(もっと読む)
FMCW信号生成回路
【課題】小さな回路規模と低い消費電力で、かつ高い線形性で周波数が変換する信号を生成可能なFMCW信号生成回路を提供する。
【解決手段】FMCW信号生成回路100は、制御信号により発振周波数が制御され、FMCW信号を生成する発振器101と、FMCW信号の位相を検出する位相検出器102と、位相を微分して周波数を得る第1の微分器102と、周波数を微分して周波数変化量を得る第2の微分器103と、所定の値に設定された設定周波数変化量と周波数変化量との誤差を算出する減算器106と、誤差を積分して、発振器101の制御信号を生成する積分器107とを備える。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させているため、吐水口近傍の電波強度が最も強くなり、被洗浄物が吐水口に向かって近づく状態を検知したいエリアと、洗面行為以外の検知したくないエリアとの電力差を大きくすることができ、使い勝手がよく、誤検知の少ない水栓装置を提供することができる。
(もっと読む)
レーダ装置及びその異常検出方法
【課題】故障を的確に診断して出力信号の周波数が所定の周波数帯から逸脱するのを防止することが可能なレーダ装置を提供する。
【解決手段】レーダ装置100は、異常検出手段として、位相比較回路130と電流異常検出回路140と検波回路150とを備えている。位相比較回路130は、ミリ波発振器101から出力される高周波信号を、所定の基準信号に位相同期させてロック状態を保持させるとともに、故障等によりロック状態が解除されると、これを早期に検出してミリ波発振器101の電源を遮断することで、所定の周波数帯から逸脱した高周波信号が送出されるのを防止している。
(もっと読む)
モノパルスドップラレーダ装置
【課題】方位を含むターゲット検知データを短い周期で算出できるモノパルスドップラレーダ装置を提供する。
【解決手段】モノパルスドップラレーダ装置100は、A/D変換部126からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部130と高速演算が可能な補助演算処理部140の2つを備える構成としている。補助演算処理部140では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部130では、方位算出処理を行わせている。また、主演算処理部130における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
401 - 420 / 1,238
[ Back to top ]