
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
181 - 200 / 362
レーダ装置
【課題】処理負荷を低減できるレーダ装置を得る。
【解決手段】周波数の異なる複数のパルスを送信する多周波発信型送信機1及び送信アンテナ2と、受信アンテナ4からの受信パルスに帯域制限等を施して受信信号を出力する受信機5と、A/D変換器6からのディジタル信号から目標のドップラー周波数を推定し目標信号成分を検出する目標検出処理部7と、ドップラー効果により回転した目標信号成分の位相を補正するドップラー補正処理部8と、ドップラー補正処理部8からの受信信号を蓄えるメモリ回路9と、メモリ回路9からの受信信号に基づき送信周波数方向における受信信号間の相関行列を生成する相関行列生成処理部12と、相関行列に基づきMUSIC法により目標の測距値を求めるMUSIC処理部13と、測距値に基づき目標信号成分を信号再構成し目標の測角値を求める信号再構成併用型高精度測角処理部11を設けた。
(もっと読む)
レーダ装置

【課題】DBF(デジタルビームフォーミング)の演算量を減らし、且つターゲットの高精度な位置精度を得るレーダ装置を提供する。
【解決手段】複数チャンネルの受信信号を複数のグループに分割し、グループ毎にDBFを行うDBF処理部12と、DBF処理部12によるグループ毎のDBF結果の各周波数成分における振幅もしくは電力を加算する加算部13と、加算部13の加算結果よりターゲット5が反射した電波による信号のピーク周波数を検知するピーク検知部14と、得られたピーク周波数をもとにターゲット5の距離・速度を演算する距離・速度演算部15と、ピーク検知部14が検知したピーク周波数の周波数成分を抽出し、ターゲット5で反射されてくる電波の角度を演算する角度演算部16を備えている。
(もっと読む)
モノパルス測角レーダ装置
【課題】幅の広い形状のビームを用いた場合にも良好な角度分解能により測角処理を行なうことのできるモノパルス測角レーダ装置を得る。
【解決手段】和(Σ)及び差(Δ)のそれぞれのビームパターンで受信したレーダエコー信号により目標のモノパルス測角を行なう際に、これらレーダエコー信号を受信処理してΣ信号及びΔ信号を得た後に、Σ信号における目標の信号対雑音比、または、Σ信号及びΔ信号を用いた測角処理結果としての粗測角値に基づいてΣ信号を減衰させ、この減衰後のΣ信号とΔ信号のレベル比により目標の測角値を算出する。
(もっと読む)
走行制御システム
【課題】先行車を捕捉して車間距離を計測するレーダ装置と、その車間距離を目標値と一致させるべく追従制御を行う手段と、を備える走行制御システムにおいて、何らかの原因により、先行車を捕捉できなくなることがあるので、追従制御を不必要に解除するのを避けつつ、自車の車線変更時に十分な加速性を確保できるようにする。
【解決手段】先行車を捕捉できなくなるとその直前の計測データに基づいて追従制御を続行しつつ、先行車を捕捉できなくなってから所定時間の間、先行車を捕捉できない場合に先行車を見失ったと判定する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11およびS12→S15)、自車の車線変更を検出すると先行車を捕捉できなくなったときの計測データに基づく追従制御を停止して設定車速を目標とする定速制御を開始する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11〜S13→S15)と、を備える。
(もっと読む)
レーダ装置および目標検出方法
【課題】ビーム幅内に回転体の目標と非回転体の目標とが存在する場合であっても、これらを識別できるレーダ装置を提供する。
【解決手段】ΣビームをFFTする第1FFT部41と、このFFTによりフィルタバンク毎に分離された信号から所定のスレショルドレベルを超えた信号を検出するスレショルド検出部42と、ΔビームをFFTする第2FFT部43と、スレショルド検出部からの信号と第2FFT部からの信号とに基づき測角する測角部44と、測角により得られた測角値の幅に対応する周波数軸上のフィルタバンクを抽出する周波数幅分類部45と、抽出されたフィルタバンクの信号を、フィルタバンクの幅を変更しながら逆FFTするIFFT部46と、逆FFTにより得られた値が最大になるフィルタバンクの幅から目標のドップラ周波数幅を決定し、識別情報として出力する周波数幅抽出部47を備えている。
(もっと読む)
レ−ダ装置
【課題】レーダ装置において、所定間隔離間した送信アンテナ対に送信信号を伝送する伝送経路対や、伝送経路対に送信信号を分配するスイッチを備えた構成であっても、探知性能の低下を防止する。
【解決手段】レーダ装置は、前記所定周波数より低い周波数のレ−ダ信号を出力する発振器と、前記発振器が出力するレ−ダ信号を、送信アンテナ対への伝送経路対に分配するスイッチと、伝送経路対にそれぞれ接続され、前記レ−ダ信号の周波数を前記所定周波数に変換してから送信アンテナ対に出力する逓倍器対を有するので、スイッチや伝送経路を通過する送信信号の周波数を小さくすることで、スイッチの挿入損失や伝送経路の伝送損失を抑えることができ、送信信号の強度低下による探知性能低下を防止できる。
(もっと読む)
航跡割当装置
【課題】組合せ最適化問題を解くメタヒューリスティックス手法を用いて航跡割当問題の一つであるMFA問題の解を高速に求める航跡割当装置を提供する。
【解決手段】測定して蓄積された移動体の航跡に関する観測データに基づき、予め定められた制約条件に違反しない複数の航跡候補を割当パターン群として生成し、この生成された割当パターン群を構成する各割当パターンに対し、航跡の始点に基づくグループに分類し、各グループの各割当パターンに対して一意の番号を付与する航跡候補群生成手段3,4と、各割当パターンに付与された番号に基づき、組合せ最適化を図るメタヒューリスティックス手法によって観測値を航跡に割り当てる航跡割当処理を行う航跡割当処理手段5〜10とを有することを特徴とする航跡割当装置にある。
(もっと読む)
測角装置
【課題】高精度に測角できる測角装置。
【解決手段】サブアレイ信号に基づき位相モノパルスビーム(Σ、Δ)を形成するモノパルスビーム再形成部41と、ΣビームをFFTする第1FFT部42と、第1FFT部からの信号から所定のスレショルドを超えたフィルタバンクの信号のみを抽出し、抽出した信号のバンク番号の平均値または重心値を算出し、そのバンク番号のΣビームを出力するスレショルド抽出部43と、ΔビームをFFTする第2FFT部44と、スレショルド抽出部からのΣビームと第2FFT部からのΔビームに基づき測角する測角部45と、測角により得られた測角値で示される目標方向がビーム中心方向にない場合は指向角を指示するレーダ制御部46を備え、モノパルスビーム再形成部は、指示された指向角をビーム中心方向とする位相モノパルスビームを再形成し、測角部は、再形成された位相モノパルスビームに基づき測角する。
(もっと読む)
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
(もっと読む)
検知対象検知サーバ
【課題】検知対象を検知する信頼性を高めることができる検知対象検知サーバを提供する。
【解決手段】検知対象検知サーバ1は、検知対象に設けた検知用タグTを用いて、周辺に検知対象が存在するか否かを検知する検知装置4に無線通信を行うと共に、検知対象の周辺に配置した発信電波を受信する一以上の受信機2にネットワークを介して接続するものであって、受信機情報を得る受信機情報取得手段3と、検知対象位置情報を得る検知対象位置情報取得手段11と、検知対象位置情報を検知装置4に送信する検知対象位置情報送信手段13と、を備える。
(もっと読む)
モノスタティックマルチビームレーダセンサ、ならびに方法
アンテナ群と、複数の変換ミクサ(31,32)からなるミクサシステムとを備える、とりわけ自動車用のモノスタティックマルチビームレーダセンサでは、前記変換ミクサ(31,32)が前記アンテナ群のアンテナ素子(1)に接続されており、送信動作と受信動作に対して異なる指向特性を実現するために、第1の数の変換ミクサ(31)が絶縁で接続され、第2の数の変換ミクサ(32)が変換で接続される。 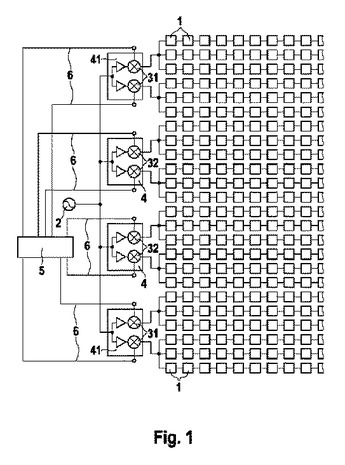 (もっと読む)
(もっと読む)
レーダ装置
【課題】不要波環境下であっても目標検出能力を高めることができ、また、処理規模または回路規模を増大させずに目標に対する測距および測角ができるレーダ装置。
【解決手段】位相中心が異なる複数のサブアレイを含むアンテナ1と、複数のサブアレイからのサブアレイ信号に対してICAを行って目標信号と不要波信号を分離するICA処理部2と、分離された信号から目標信号を検出して目標までの距離を計測する信号検出/測距部4と、サブアレイ信号から信号検出/測距部で計測された距離の周りに存在するM個(Mは正の整数)のセルを抽出するMセル抽出部5と、抽出されたM個のセルの信号を用いてモノパルスビームを合成するモノパルスビーム合成部6と、合成されたモノパルスビームにSTAPを適用するSTAP部7と、STAP部においてSTAPが適用されたモノパルスビームを用いてモノパルス測角を行う測角部8を備える。
(もっと読む)
レーダ装置
【課題】送受信する信号の周波数を変えずに、マルチパス環境下において、高精度に測角することができるレーダ装置。
【解決手段】受信信号に基づき生成されたΣビームおよびΔビームから開口分割信号を生成する開口分割信号生成器41と、開口分割信号生成器で生成された開口分割信号に基づき、任意の指向方向を有する複数の複数の位相モノパルスビームであって、各々はΣビームとΔビームとから成る位相モノパルスビームを再形成する位相モノパルスビーム再形成器42と、位相モノパルスビーム再形成器で再形成された複数の位相モノパルスビームの中からΣビームの出力が最大となる指向方向のΣビームおよびΔビームを抽出する再形成ビーム抽出器43と、再形成ビーム抽出器で抽出されたΣビームとΔビームとを用いて位相モノパルス測角により測角値を算出する測角処理器45とを備える。
(もっと読む)
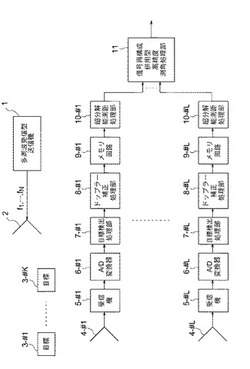
探知測距装置および探知測距方法
【課題】センサアレーを用いて到来方向推定を行い、さらに複数の送信センサを用いて実効開口を拡大する探知測距装置において、スイッチの切り替えによる時分割処理の弊害をなくし、高精度の測定を可能とする。
【解決手段】変調器161,162において互いに直交する符号を用いて送信波を拡散し、送信用センサAT1,AT2から放射する。受信用センサAR1〜ARNで受信された信号のそれぞれを分岐器241,242で2分岐し、そのそれぞれについて復調器2611〜262Nにおいて送信側で用いた符号と同じ符号により逆拡散する。
(もっと読む)
航空機通信システムとそのアンテナ指向制御方法
【課題】ロストした航空機の位置を予測して通信アンテナを航空機に指向させ、通信を再開させる。
【解決手段】衛星基地局S2から得られる位置情報、航空管制システム20で得られる位置情報、飛行計画書から得られる位置情報を入手し、直接通信が途絶えたとき、優先度判定を行って精度の高い順序で位置情報を予測アルゴリズムA2による予測処理を実行する。この予測アルゴリズムA2では、航空機Tが時刻t1の位置Aにて速度vで移動している状態でロストしたとすると、時刻t2の位置を予測し、さらに現在時刻tとの伝送時間差とアンテナ動作時間を演算し、時間差分の位置ずれを予測位置Bに反映させ、この予測位置情報を基に、通信アンテナ装置11の航空機Tの予測位置Bの方向を計算し(A3)、この計算結果から通信アンテナ装置11の指向方向(方位・仰角)を駆動制御して航空機Tの予測位置Bの方向にビームを形成する。
(もっと読む)
リーダライタ、及び物品仕分システム
【課題】RFIDタグの存在する方向を識別することができるリーダライタを提供する。
【解決手段】このリーダライタ50は、VCO2の出力信号の位相を、基準となる入力信号の位相に同期させるPLL回路1と、PLL回路1の制御電圧に基づいて所定の周波数を発振するVCO2と、VCO2から発信された信号をマイクロ波に変調する変調器3と、マイクロ波の方向により向きを決定するサーキュレータ5と、マイクロ波を発信してタグ7からの反射波を受信するアンテナ6a、6bと、sin波を復調するミキサ9と、cos波を復調するミキサ11と、ミキサ9の信号から所定の周波数成分のみを通過するBPF12と、ミキサ11の信号から所定の周波数成分のみを通過するBPF13と、A/Dコンバータ14とA/Dコンバータ16から位相を演算する演算器15と、を備えて構成されている。
(もっと読む)
レーダ装置
【課題】小型のアンテナであっても、目標の検出性能および測角精度を向上させることができるレーダ装置を提供する。
【解決手段】一定の開口を有する空中線3と、空中線から所定時間間隔で送信したパルス信号の反射波を受信し、目標に対する自己の相対速度と所定時間間隔とに基づき決定される受信位置毎に受信データを生成する受信手段41と、受信手段からの受信データをレンジセル毎にフーリエ変換し、該フーリエ変換により得られた信号のピーク値から目標を検出し、該ピーク値に対応するドップラ周波数と受信位置とに基づき目標方向を測角するSAR検出/測角処理部53を備えている。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 ウェイト制御による時空間適応信号処理方式において、ウェイト算出の計算量を削減し、かつSINR特性の性能劣化を抑制する。
【解決手段】 アダプティブアレーアンテナ21で得られたレーダパルスの目標反射信号を受信部22で受信検波し、データ蓄積部23の受信タイミングに沿った対応セル位置に記憶する。時空間適応信号処理部27のウェイト算出回路271において、不要波のみと想定されるセルのデータから共分散行列を演算して適応ウェイトを求め、ビーム合成回路272において、適応ウェイトによりアンテナ受信信号にウェイト制御を施して出力データとする。上記ウェイト算出には、ポスト−ドップラー処理を採用してSINR特性を向上させる。このとき、その処理で選択される全バンクについてウェイトを算出することで計算量を削減し、その選択において隣り合ったバンクをオーバーラップさせることでSINR特性の劣化を抑制する。
(もっと読む)
車載レーダ装置
【課題】角度分解能を向上し、角度情報の算出精度を向上させることのできる車載レーダ装置を提案する。
【解決手段】複数の受信アンテナを含む受信アンテナアレイと、2つの送信アンテナを有し、前記2つの送信アンテナから時分割で交互に電波を送信し、前記電波が目標で反射した反射波を前記各受信アンテナで受信し、得られた各受信データを用いて、少なくとも前記目標に関する角度情報を求める車載レーダ装置であって、受信アンテナアレイは、間隔dを隔てて前記複数の受信アンテナを並べて構成され、2つの送信アンテナは、前記受信アンテナアレイの各端部に位置する前記受信アンテナからそれぞれ間隔Dを隔てて配置され、前記間隔Dが、前記間隔dよりも大きな任意の値に設定される。
(もっと読む)
測角装置
【課題】必ずしも全てのセンサ素子の複素ゲインパターンが既知でなくてもマルチパス波を除去してから測角処理を行える測角装置を提供する。
【解決手段】測角装置は、到来波を受信し観測情報として出力する複数のセンサ素子と、上記複数のセンサ素子の一部または全体からの観測情報を合成し合成情報として出力する複数の合成手段と、上記合成情報をガイディングセンサとして用いるVESPA処理により到来波の入射角度を推定するVESPA測角処理手段と、を備える。
(もっと読む)
181 - 200 / 362
[ Back to top ]