
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
241 - 260 / 362
センサ制御装置

【課題】3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【解決手段】軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定し、その判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測するようにしたものである。
(もっと読む)
レーダ装置

【課題】回路規模を大きくせずに、不要波の抑圧、角度分解能の向上、マルチパス環境下おける角度精度の向上等を図ることができるレーダ装置を提供する。
【解決手段】円開口が形成されるように一方向に配置し、且つ該一方向に直交する方向に開口分割した複数のサブアレイを含む1次元DBFアレイアンテナ4と、1次元DBFアレイアンテナの複数のサブアレイから送られてくるモノパルス合成前のサブアレイ信号に対して信号処理を行う信号処理器6とを備えている。
(もっと読む)
車両の障害物検知装置及びその検知方法
【課題】アップビート周波数とダウンビート周波数のペアリングを、短時間で正確に行うことができる車両の障害物検知装置及び方法の提供。
【解決手段】周波数変調持続波(FM−CW)を送信し、アップビート周波数とダウンビート周波数とを出力するレーダー装置1と、所定のサンプリング時間間隔で、アップビート周波数とダウンビート周波数とのペアリングを行うペアリング処理部2と、組み合わせたアップビート周波数及びダウンビート周波数に基づいて、自車両から物標までの距離と、自車両と物標との相対速度とを求め、自車両の周囲の物標を検知する物標検知部3と、物標ごとに、次回のサンプリング時の予測データを求める予測処理部4と、を備え、ペアリング処理部2は、予測処理部4による予測データの確度の高い物標について優先的にペアリングを行う。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 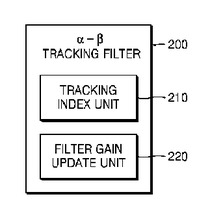 (もっと読む)
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
車載レーダ装置
【課題】簡易な構成でありながら車両探知時に適切な補正を行って早期かつ確実に前方車両の探知を行うことができる車載レーダ装置を提供することを課題とする。
【解決手段】車載レーダ装置2には、ライト制御ECU3、ACC装置4、電動パワーステアリングECU(EPS)5、ナビゲーションシステム6が電気的に接続されている。ライト制御ECU3は、ヘッドライトのON/OFFに関するライトスイッチ情報を取得する。また、ヘッドライトやテールライトの点灯、消灯を行ういわゆるオートライト機能に用いられる照度センサから自車両周囲の照度値を取得する。ライト制御ECU3は、さらに、サスペンションの荷重状態、伸縮度合いから自車両の傾き情報を得るべく縦方向指示情報を取得する。この縦方向指示情報は、車両の前後方向の傾斜を把握する際に利用される情報で、この情報を用いて測定情報の補正を行い、ターゲットの判断に用いる。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
飛翔体誘導装置
【課題】飛翔体が最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供する。
【解決手段】演算処理装置3が、飛翔体1の位置を基準とする相対座標系において、目標Tは等速直線運動するものとし、飛翔体1は等速加速度直線運動するものとして飛翔体1と目標Tとの会合点と会合時間を推定計算する。
(もっと読む)
車載用レーダ装置およびその制御方法
【課題】自レーダ装置においてターゲットの検出が困難な場合でも事故回避の可能性を高めることができる車載用レーダ装置を提供する。
【解決手段】送信アンテナ103から送信し、ターゲットから反射してきた反射波を受信アンテナ104,105で受信し、ターゲットとの距離や相対速度を検出する車載用レーダ装置100において、自車両でターゲットを認識できず、自車両での衝突回避動作が不十分な場合にも、他レーダ装置に自車両の存在を認知させることにより、事故に巻き込まれる可能性を低減する。具体的には、信号処理部109により、(1)検知したターゲットに向けて、駆動装置111を介して電波反射器112を旋回駆動し、ターゲットのレーダ装置に自車両の存在を検知させる、(2)報知装置110で運転者に警報する。
(もっと読む)
広帯域レーダ装置及びその移動物体検出方法
【課題】広帯域レーダ装置において、移動物体の位置検出精度を高め、かつ信号を変換するときの計算回数を少なくすることである。
【解決手段】2次元座標上の距離を示す距離設定値を設定する(S13)。設定した距離設定値に応じた角度ステップ(角度間隔)を計算する(S114)。次に、計算により求めた角度ステップに基づいて角度を設定する(S15)。1次元のUWBレーダパルス応答差分信号から、距離設定値と角度により定まる2次元平面上の該当する位置の受信信号強度を計算する(S15)。これにより1次元の信号が2次元のUWBレーダパルス応答差分信号に変換される。
(もっと読む)
無線周波数識別タグを使用してラボウェアをの位置突き止め識別するための方法及びシステム
【課題】無線周波数識別(RFID)タグを用いてラボウェアの自動的な位置付けおよび識別を行う方法及びシステム。
【解決手段】本方法及びシステムは、ラボウェア(又はラボウェア・ホルダ)に関連付けられた複数のRFIDタグ(一意のデータ・コードで予めプログラムされる)を含む。RFIDタグは、ラボウェア(又はラボウェア・ホルダ)の位置決めペグに埋め込まれ得る。本方法及びシステムは、ラボウェアを支える器具デッキの既知の位置の近くに取り付けられる複数のRFIDタグ・リーダを含む。RFIDタグ・リーダは、ラボウェアが器具デッキに配されたときに、RFIDタグの存在について自動的にスキャンし、次いで、デッキ上で見つけられた各タグの特定の位置および各タグの一意のデータ・コードを、処理デバイスへ報告する。この情報を用いて、本方法及びシステムは、配されたラボウェアの位置、向き、IDのうちの1以上のものを決定する。
(もっと読む)
船舶用レーダ
【課題】搭載される船舶の動揺に応じて変化するレーダアンテナの姿勢変化に起因するアンテナ方位角の誤差による問題を解消して、小型船舶に搭載する場合でも物標の探知精度および追尾精度を確保する。
【解決手段】姿勢角センサ2は船体のローリング角およびピッチング角をそれぞれ検出し、方位誤差補正部6は船体の進行方向である船首尾方向に平行で且つ正横方向に平行な船体基準面内でのビームの指向方向であるアンテナ方位角と姿勢角(ローリング角,ピッチング角)とに基づいて、アンテナの方位角を水平面に投影した角度を補正アンテナ方位角として求める。レーダ映像データ生成部7および物標追尾部8では、この補正後のアンテナ方位角を用いて処理を行う。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の角速度を算出する「レーダ計測システム」を提供する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
(もっと読む)
レーダ装置
【課題】ビームを高速に走査する場合にも角度精度の高い計測を実現する。
【解決手段】送信する波動を送信ビームにすると共に、観測対象とする反射物体からの反射波の到来方向を送信ビームの放射方向と一致させてビーム走査を行い、得られた反射波を受信ビームを用いて、配列した複数の受信素子のいずれかで受信し、ビーム走査速度と反射物体の仮定距離に基づいて送信ビームとその反射波の角度差を算出し、その角度差に応じて複数の受信素子の中から受信ビームを受信した受信素子のみを選択してその受信信号を得る。
(もっと読む)
UWBレーダによる共振タグの検出
検出システムは、UWB電磁放射のパルスによる照射に対する磁気共鳴応答を有する物質を検出するための受信機を有し、上記受信機は、パルスが物質と相互に作用した後にパルスを検出するための検出器(40、45)と、検出されたパルス内で物質の磁気共鳴応答を識別するように設けられた識別器(55)とを有する。磁気共鳴応答を有する物質を有するタグ(20)でタグ付けされたアイテムを、上記アイテムをUWBパルスで照射し検出されたパルス内で物質の磁気共鳴応答を識別して走査することによって、アイテムは位置づけられ、イメージングされ、又は起動されることが可能である。タグの磁気共鳴応答は、タグの起動を引き起こすことができる。タグは、異なるタグをそのシグネチャによって識別しかつ区別化できるように識別可能な磁気共鳴のシグネチャを提供するように設けられた磁気共鳴応答を有することが可能である。 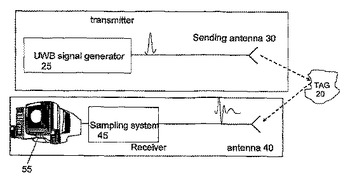 (もっと読む)
(もっと読む)
システム航跡測定装置および航跡割当・航跡誤差補正処理方法
【課題】複数のセンサから得られる複数のセンサ航跡を用いて、正確な、センサ航跡の航跡誤差推定、航跡割当およびシステム航跡を生成する。
【解決手段】ローカル航跡とリモート航跡のペアで航跡の組合せを作成し、各組合せの航跡ペアの差分を取って、組合せごとに算出したペアの差分の2乗和の最小値を1つ選択し、その最小値に対応する組合せを航跡割当とし、またペアの差分の2乗の頻度分布の最頻値の中から航跡バイアス誤差分散を算出する航跡割当処理部と、ローカル航跡とリモート航跡の航跡ランダム誤差分散と、航跡バイアス誤差分散に基づいて航跡バイアス誤差を算出する航跡誤差推定処理部と、航跡バイアス誤差分に基づいて補正した補正したリモート航跡とローカル航跡を重み付け統合してシステム航跡を生成する航跡統合処理部を備える。
(もっと読む)
物体検知装置
【課題】レーダ装置を用いて先行車などの物体を検知すると共に、より簡易な構成で虚像を実際の物体(実像)と誤認するのを防止する物体検知装置を提供する。
【解決手段】検知された第1の物体(物体104)と車両(自車)10の間に第2の物体(物体102)が検知されると共に、検知された第1の物体の相対距離r1+r2が検知された第2の物体の相対距離r1の整数倍(例えば2倍)であり、車両の移動速度v1,v1’と検知された第1の物体の移動速度(相対速度)v2,v2’が等しく、かつ検知された第1の物体の相対角度が同一(θ1=θ2)であるとき、検知された第1の物体は虚像であると判定する。
(もっと読む)
レーダ装置
【課題】先行車と自車の距離が急激に変化した場合においても、先行車を見失うことなく、光軸の補正を行うことができるレーダ装置を提供する。
【解決手段】受光量が最大となる鉛直方向のスキャン方向と、スキャン範囲の鉛直方向の中心位置と、のずれ量を演算する。今回のスキャンで測定した先行車との距離、および相対速度に基づいたフィルタ係数で、今回のスキャンで演算したずれ量を、前回スキャン時に演算したずれ量と平均化する。先行車と距離が小さく、相対速度が大きければ、フィルタ係数を大きくする。フィルタ係数を大きく設定すると、今回のスキャンで演算したずれ量の影響が大きくなり、応答性が上がる。したがって、車間距離が小さくなった場合、接近速度が大きくなった場合に、迅速に光軸の補正を行うことができ、先行車を見失うことがなくなる。
(もっと読む)
マイクロ波通信回線の受信強度低下判定装置
【課題】マイクロ波回線の受信強度低下判定を行う。
【解決手段】送信局と受信局との間を、電波を反射する反射板で結ぶマイクロ波回線の受信強度低下の判定を行う。受信レベルが基準レベル以下になったとき、受信アンテナ側の傾斜センサのセンサ出力が基準値以上であるときは、受信アンテナの方位がずれたと判断してその修理のための情報を点検・監視所に送信する。基準値以下であるときは、送信アンテナ側の傾斜センサのセンサ出力が基準値と比較される。基準値以上であるときは送信アンテナの方位がずれたと判断してその旨の情報を点検・監視所に送信する。基準値以下であるときはその他の低下要因であると判断し、点検・監視所にその旨の情報を送信する。この絞り込まれた情報に基づいて点検・監視所では点検・修理・調整作業を行うので、対応が迅速になる。
(もっと読む)
レーダ装置
【課題】先行車と自車の距離が急激に変化した場合においても、先行車を見失うことなく、光軸の補正を行うことができるレーダ装置を提供する。
【解決手段】レーザレーダ装置100は、先行車との距離Lを測定する。レーザ光は、リフレクタ200での反射光が最大となる。レーザレーダ装置100は、受光量が最大となるレーザ照射角度と、水平照射角度の差θを算出する。距離Lとθから、レーザレーダ装置100とリフレクタ200の設置位置の高差hを求める。先行車との距離が所定値未満、かつ相対速度(の絶対値)が所定値以上となった場合、高差hに基づいて、理想的光軸ずれ補正量を算出する。
(もっと読む)
241 - 260 / 362
[ Back to top ]