
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
321 - 340 / 362
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
目標検出方法
目標を識別するためにレーダーシステムのようなセンサーからの反射を処理する方法が提供される。本方法は、よりよい識別能力を与えるために、数回の走査からのデータを集積するために、検出前トラックルーチンを使用する。しかながら、検出前トラックルーチンの実行においては、多数の目標の動きが仮定され、この様な動きを説明するために、データが組み合わせられる。閾値以上の結果は、目標が存在し、仮定された速度で移動することを示す可能性がある。正確な目標動き仮定で組み合わされたデータは、一時的な雑音および反射妨害よりもより持続性があるので、本方法は、より正確な目標検出を提供する。一旦目標が識別されると、それは、別の探索においてデータセットから取り除かれることが好ましい。 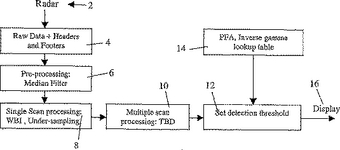 (もっと読む)
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
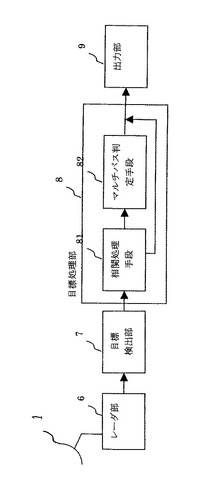
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
スキャン型レーダ装置

【課題】 本発明は、レーダ制御部における信号処理能力を増強することを不要とし、精度良く広角化を図ることができるスキャン型レーダ装置を提供する。
【解決手段】 レーダ制御部内に備えられた制御対象認識部において、物標検出処理が実行されるとき、走査機構にスキャンビームの角度を指示したとき、隣接走行レーンを含めた3車線の範囲の物標を検出する必要がある場合、各ビームのスキャンされる角度と、3車線分の走行レーン幅とから、各ビームに係る有効距離Leが演算される。各有効距離Leは制御距離Lcの大きさと比較され、LeがLcより大きい場合、当該ビームに対する検出データ数をデフォルト値に設定する。LeがLcより短い場合、検出データ数のデフォルト値に比率Le/Lcを乗算して、当該ビームに対する検出ビーム数を求め、設定する。検出ビーム数が制限された分の処理時間を広角化に使用することができる。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
モノパルスレーダアンテナ
【課題】 モノパルス方式による方位検知において、平面アンテナの端部で被検出物からの反射が回折する干渉波が受信アンテナに受信されるため、この干渉波を抑制し、モノパルス方式による方位角度検知精度を向上させる。
【解決手段】 受信アンテナの各々は複数のアンテナ素子からなるアレイアンテナであって、検知方位角方向に偶数の素子列をもち、前記素子列の隣り合う間隔をレーダで使用する周波数の波長の半分の奇数倍程度としたアレイアンテナとする。 また、隣り合う前記素子列の間隔が変更できない場合で、前記受信アンテナの各々は複数のアンテナ素子からなる平面アレイアンテナであって、検知方位角方向に偶数の素子列をもち、平面アンテナを構成する面の端部に導体を配し、前記導体の先端から隣り合う前記素子列までの距離の差をレーダで使用する周波数の波長の半分の奇数倍程度となる前記導体の厚みとする。
(もっと読む)
車両用物体認識装置
【課題】レーザレーダセンサ5の高さ方向における中心レーザ光の中心軸角度と基準角度ΔAとのずれ角度を求める対象車種の制限を緩和し、もって、レーザレーダセンサ5の向きの変化を検出する機会を増加すること。
【解決手段】
Y軸方向における個々のレーザ光のビーム幅が、リフレクタ位置の設置高さのばらつき範囲をカバーできるまで広がる距離Zよりも遠方に前方車両が位置する場合に、その前方車両のリフレクタからの反射レーザ光を生じさせたレーザ光の面番号を検出する。これにより、前方車両のリフレクタ設置高さの変化に起因して、そのリフレクタからの反射レーザ光を生じさせるレーザ光の面番号が変化することを抑制できる。従って、複数個のレーザ光の面番号の平均値に基づいて、高さ方向におけるレーザ光の中心軸角度と基準角度ΔAとのずれ角を示す上下光軸ずれ学習角度θuを精度よく算出することができる。
(もっと読む)
物体監視センサ
小型、低電力かつ広範囲の物体を高精度かつ高速に検出できる物体監視センサであって、ステレオ効果を位相差として感知する複数のモノパルス方式を採用するパッチアンテナ(1)と高周波回路を有し、放射電磁波の反射波から相対速度と相対距離を検出するドップラーレーダと、光の侵入角度を定義するプリズムレンズ(4)と1次元のアレイ上に受光体(3)が配置した光イメージセンサとを組合わせて構成される。  (もっと読む)
(もっと読む)
航空機騒音データ分析処理方法
【課題】航空機騒音のデータ分析において、騒音を自動測定するとともにかぶり音の除去を効果的に行う方法を提供する。
【解決手段】任意の日の任意の測定局の騒音データを騒音レベル波形の大きい方から順にソートして、最も大きい騒音レベル波形から表示装置に表示、及び/又は、音響再生装置で再生させると共に、WECPNL値又はLAeq等の値の騒音評価値に一定の寄与率を設定して乗じた数値以上の騒音レベル波形のみをオペレータが目視して航空機騒音以外の騒音を判断して削除する航空機騒音データの分析処理方法。
(もっと読む)
測角レーダ装置
【課題】2つのアンテナ受信強度に基づいて検知対象物方向の角度を演算する測角レーダ装置において、その角度を精度よく求める。
【解決手段】送信アンテナ4から送信ビームを放射し、検知対象物からの反射ビームを2つの受信アンテナ5a,5bで受信する。受信ビームは、FM−CW送受信装置7及びA/D変換器8を経由して信号処理装置14に入力される。そして、アンテナゲイン差補正部18で、受信リファレンス信号メモリ部17から入力した受信アンテナ5a,5bのゲイン差のデータで受信ビーム強度を補正する。補正された受信ビームは、FFT処理部19で周波数解析され、CFAR処理部20で所定の閾値以上となるビーム強度が検知対象物からの成分として抽出される。周辺ノイズ補正部21は、抽出されたビーム強度から、その周波数近辺におけるビーム強度をノイズ成分として減算する。
(もっと読む)
レーダー装置
【要 約】
【課 題】本発明は、簡易な構成で対象物までの距離及び方向を検出することを目的とする。
【解決手段】送信波を送信し対象物で反射された受信波を受信する第1及び第2の送受信回路を有し、前記第1の送受信回路は第1の送受信回路の送信した送信波が対象物で反射された受信波を受信すると共に前記第2の送受信回路が送信した送信波が対象物で反射された受信波を受信し、第2の送受信回路は当該第2の送受信回路の送信した送信波が対象物で反射された受信波を受信することを特徴とする。前記第1及び第2の送受信回路を用いて前記第1及び第2の送受信回路から対象物までの距離を算出し、算出した対象物までの距離に余弦定理を適用することで、送受信回路及び対象物を結ぶ直線と、2つの送受信回路を相互に結ぶ直線との成す角度を算出する。
(もっと読む)
他車両検出機および他車両検出方法
【課題】 他車両を的確にかつ安定的に検出することができ、ひいては、交通事故の発生率を低減することができる「他車両検出機および他車両検出方法」を提供する。
【解決手段】 検出装置2によって検出された検出点が、一群の検出点群をなす場合には、当該検出点群を包囲する判定用仮想窓を設定するように形成され、かつ、この判定用仮想窓に対する前記検出点群の移動状態に基づいて、前記検出点群に対応する被検出物が1台の車両であるらしいか否かを判定するように形成された判定装置3を備えたこと。
(もっと読む)
車両用制御対象判定装置
【課題】 自車の将来の走行軌跡の信頼性が低下したときでも制御対象の誤判定の発生を防止する。
【解決手段】 レーダー装置14が自車の進行方向に存在する物体を検知した結果と、走行軌跡推定手段M1が車速およびヨーレートから推定した自車の将来の走行軌跡と、予め定められた制御対象判定条件とに基づいて制御対象判定手段M4が制御対象を判定する際に、振れ速度検出手段M3が推定された走行軌跡が左右に振れる振れ速度を検出し、振れ速度が閾値以上であると制御対象判定手段M4が所定距離以遠の物体を制御対象から除外するので、振れ速度が大きくて走行軌跡の推定精度が低下しているときに遠方の物体を制御対象から除外することで、制御対象の誤判定を回避することができる。
(もっと読む)
無線タグ検出システム
【課題】 送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグを好適に検出する無線タグ検出システムを提供する。
【解決手段】 複数の据置式無線タグ通信装置12と携帯式無線タグ通信装置14とが互いに異なるタイミングで送信信号を送信するように制御する送信制御部146を含むことから、時分割で前記送信信号を送信することで、前記複数の据置式無線タグ通信装置12から送信される送信電波と携帯式無線タグ通信装置14から送信される送信電波との干渉が好適に防止される。すなわち、送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグ16を好適に検出する無線タグ検出システム10を提供することができる。
(もっと読む)
電磁波を用いた生物体に関する情報の推定方法および装置
【課題】人物等の位置、3次元姿勢、行動などの情報を推定する際に、「照明」、「気温」、「人物の着用する衣服や靴」などの影響を受けることなく、比較的精度高く推定すること。
【解決手段】生物体1に関する情報の推定において、生物体1のいる空間にミリ波からテラヘルツ領域の周波数を含む電磁波8を照射して、生物体1により反射される反射電磁波9を検出することによって生物体1の少なくとも一部位の方向と距離を含むデータを得、生物体1の少なくとも一部位の空間位置を求める。ミリ波からテラヘルツ領域の周波数を含む電磁波は、物体は透過するが生物体ではその水分等のために透過せずに一部は反射される特性を持つ。
(もっと読む)
近距離目標物体の距離及び角度特定用の多目標対応型方法及び多目標対応型センサー機器
本発明は、近距離目標物体の距離及び角度特定用の多目標対応型方法に関し、本方法は以下のステップを含む。すなわち、a)第一のセンサー要素(10)の送信アンテナ(11)により特性信号が送信され、b)反射された特性信号が第一のセンサー要素(10)の少なくとも2個の隣接する受信アンテナ(1、2)において受信され、c)目標物体と第一のセンサー要素(10)の間の距離を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)への反射された特性信号の伝播時間の差が測定され、d)目標物体と第一のセンサー要素(10)との角度を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)の間での特性信号の位相差が測定される。本発明は、上述の方法を実施する機器にも関する。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 1つの追随航跡に含まれる目標の機数を正確に判定することができるレーダ装置を得る。
【解決手段】 対象となる目標11に追随しながら指向性をもつ追随ビームを送信し、目標からの反射波を受信して目標の検出、追随、情報管理、類識別及び表示を行うレーダ装置2において、目標を検出するためのレンジビン401内における第1の目標の機数を検出するとともに、追随フィルタの相関ゲート402内でかつレンジビン401外における第2の目標の機数を検出する。前記の第1の目標の機数及び第2の目標の機数を加算して総合機数を判定する。
(もっと読む)
レーダ装置
【課題】要求覆域に対して各レーダで探知すべき覆域を最適化し、短いデータ更新間隔で要求覆域を探知できるレーダ装置を得る。
【解決手段】要求覆域を保持する要求覆域保持手段7と、レーダ情報を保持するレーダ情報保持手段8と、覆域境界の組を保持する覆域境界保持手段10と、前記要求覆域、レーダ情報、覆域境界の組に基きデータ更新間隔を評価するデータ更新間隔評価手段11と、隣接するレーダのデータ更新間隔を比較し大きい方を出力する隣接レーダデータ更新間隔比較手段13と、隣接する一方のレーダのデータ更新間隔が減少し、隣接する他方のレーダのデータ更新間隔が増加するように、両者の間の覆域境界を修正する覆域境界修正手段14と、前記要求覆域、レーダ情報、修正後の覆域境界の組に基き各レーダのレーダ諸元を算出するレーダ諸元算出手段16と、前記レーダ諸元に基き、各レーダを制御するレーダ制御手段17とを設けた。
(もっと読む)
レーダ装置
【課題】 MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】 到来波数推定処理の際に、信号処理部8に記憶しておいたビート周波数ごとのスレッショルドλTH1〜λTH256に基づいて雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
近距離レーダー測定用のマルチスタティックセンサ装置およびこのセンサ装置の駆動方法
対象物までの距離を測定するマルチスタティックセンサ装置は、送信ユニット(Tn)および受信ユニット(Rm)を有しており、これらはそれぞれ1つずつ高周波数発振器(HFO‐Tn,HFO‐Rm)およびパルス発生器(PG‐Tn,PG‐Rm)を有している。パルス発生器(PG‐Tn,PG‐Rm)には信号発生器からクロック信号(TS,RS)が供給され、ここでクロック信号(TS,RS)は共通のデータバス(B)を介して送信ユニット(Tn)および受信ユニット(Rm)へ伝送される。これにより高周波数発振器(HFO‐Tn,HFO‐Rm)の高周波数信号の確定的な位相比が形成される。
さらに上述のセンサ装置の駆動方法では、まず2つのクロック信号が共通のデータバス(B)を介して送信ユニットおよび受信ユニットへ供給される。次に送信ユニットから信号が対象物へ送信される。さらにデータバス(B)を介して受信ユニット(Rm)を通って得られたクロック信号が対象物(O)での反射信号と混合され、ここから評価可能な測定信号が形成される。ここで距離軸線での測定信号のキャリブレーションは共通のデータバスのクロック信号のゼロ点を求めることにより行われる。これによりデータバスを介した2つのクロック信号の位相が比較される。 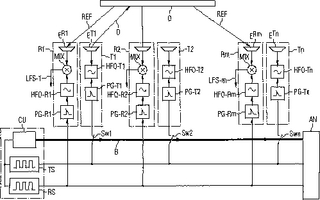 (もっと読む)
(もっと読む)
321 - 340 / 362
[ Back to top ]