
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
301 - 320 / 362
対象物検出装置および方法
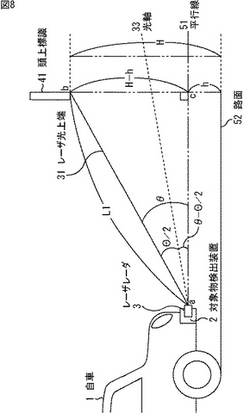
【課題】対象物検出装置の投光するレーザ光の投光方向のずれを補正できるようにする。
【解決手段】左から右に向かって走行する自車1に、所定の高さhで取り付けられた対象物検出装置2のレーザレーダ3から投光されたレーザ光は、頭上標識41により反射され、レーザレーダ3に受光され、対象物検出装置2は、頭上標識41までの距離を算出し続ける。頭上標識41がレーザ光の投光範囲外に出る瞬間、すなわちレーザ光上端31が、頭上標識41の下端bを通過する瞬間、対象物検出装置2は、頭上標識41までの距離L1を特定し、頭上標識41の設置高H、および対象物検出装置2の設置高hを基に、レーザ光上端31の平行線51に対する角度θを算出する。対象物検出装置2は、算出したθから角度Θ/2を引き、平行線51に対する光軸33の角度を求めることにより、光軸のずれを求め、これを補正する。
(もっと読む)
マイクロ波画像を生成するためのアレイ及びマイクロ波画像を取得する方法

【課題】アレイ上の2つのパターン(送信及び受信)を内蔵する場合に、それぞれのアンテナ要素の最適な位相シフト値が設定されたアレイを提供すること。
【解決手段】物体のマイクロ波画像を取得するマイクロ波画像生成システムにおいて使用する反射器アレイであって、それぞれがマイクロ波放射の第1ビームを第1ターゲットに向かって導くように第1パターンの個別の位相シフトをプログラム可能であり、且つ、それぞれがマイクロ波放射の第2ビームを第2ターゲットに向かって導くように第2パターンの個別の位相シフトをプログラム可能である複数の反射アンテナ要素を有し、前記複数のアンテナ要素は、前記物体の前記マイクロ波画像を取得するべく、前記第1パターンの一部及び前記第2パターンの一部を含むインターリーブパターンで個別の位相シフトをプログラムされる、アレイ。
(もっと読む)
レーダ装置
【課題】 小さい開口アンテナを用いた小さなハードウェア規模で精度よく目標位置を評定できるレーダ装置を提供する。
【解決手段】 空間を走査する空中線1と、空中線で空間を走査することにより得られた受信信号に基づき目標を検出する目標検出回路6と、自己の位置を測定する航法装置5と、今回の走査において目標検出回路で検出された第1の目標と過去の走査において目標検出回路で検出された第2の目標との相関の有無を判定する相関回路8と、相関回路において相関が有る旨が判定された場合に、今回の走査時に航法装置で測定された位置から見て目標検出回路で検出された第1の目標が存在する可能性のある範囲と過去の走査時に航法装置で測定された位置から見て目標検出回路で検出された第2の目標が存在する可能性のある範囲との重なりに基づき目標位置を評定する位置評定回路9とを備えている。
(もっと読む)
レーダー装置
【課題】 受信系の構成を複雑化することなく、移動目標に対する測角精度を向上させたレーダー装置を提供する。
【解決手段】 移動体に搭載され、レーダー波を送信するとともに、指向性を有する空中線4を介して移動目標による反射波を受信し、受信信号に基づいて空中線4の指向方向を制御するレーダー装置1であって、受信信号を復調し、ビデオ信号を生成する受信機5と、移動体の移動速度に基づいて、移動体の移動によるビデオ信号の位相変動を補償する自機運動補償回路6と、受信信号に基づいて移動目標のレンジ方向に関する速度成分を求め、移動目標の移動によるビデオ信号の位相変動を補償する目標運動補償回路8と、各運動補償回路による位相変動補償後のビデオ信号に基づいて、ドップラー周波数を推定するドップラー周波数推定回路9と、ドップラー周波数に基づいて、移動目標の方位を判定する測角回路10により構成される。
(もっと読む)
後退する車両のための微調整機能を有するレーダ感知器
【課題】 車両の後退のための、微調整機能を有し、車両への据え付け後に感知角の微調整を可能とするレーダ感知器を提供する。
【解決手段】 微調整機能を有する、車両のためのレーダ感知器は、センサモジュール(20)を枢動可能に受け入れるチャンバを形成するベース(10)を含む。センサモジュール(20)は、感知範囲を正確に設定できるように、その広い視野角および方向が調整可能である。パッキングブロック(15)は、前記チャンバの内壁に設定されており、ベース(10)の表面に設定された調整部品(14)によって制御可能である。操作者が適正な角度にセンサモジュール(20)を調整すると、所望位置にセンサモジュール(20)を固定するように、ベース(10)の表面の調整部品(14)が前記感知器を圧縮する。
(もっと読む)
標定位置算出方法
【課題】 標定レーダ装置の規模を増大させることなく、良好な精度を有する標定位置算出方法を得る。
【解決手段】 標定レーダ装置によって砲弾等の目標に対する複数の捕捉位置情報を取得し、これらの捕捉位置情報に基づいてこの目標に対する空気抗力係数及び偏流係数を算出し、分弧法による弾道計算を行なう際に、弾道方程式にこれら空気抗力係数及び偏流係数を適用しながら目標の標定位置を算出する。
(もっと読む)
電子走査レーダのビーム制御装置
【課題】 従来の複数のPAAを装備し各PAAで同時ビーム照射する同期型PARによる複数目標に対する追尾の同時ビーム照射方法は、目標の距離に応じて求めたPRIの長短を基に複数の群にグルーピングし、同一のグループごとに各PAA同時にビーム照射する目標の組合わせを求め、その目標に対するPRIの最大値を共通PRIとして使用し時間資源の消費を抑えるものであり、PRI共通化の他にヒット数共通化が必要となることによる時間資源の消費を考慮していないため、無駄時間を増加し、追尾可能目標数を劣化させる場合が生じるという問題がある。
【解決手段】 PRIの共通化による時間資源の消費のみではなく、ヒット数の共通化による時間資源の消費を考慮して同時ビーム照射する目標の組合わせを選定することにより、無駄時間を抑え、追尾可能目標数を極力劣化させないようにした。
(もっと読む)
検出システム、物体を検出するための方法、およびそのためのコンピュータプログラム
光学センサ(3)と、レーダ装置(2)と、光学センサおよびレーダ装置と通信的に接続されている信号処理部(4)と、を有する検出システム(1)である。信号処理部は、光学センサから送信されてくる第1信号に基づいて第1物体を検出し、第1物体の少なくとも1つの第1特性を決定するための、第1検出器(41、410〜413)と、レーダ装置から送信されてくる第2信号に基づいて第2物体を検出し、第2物体の少なくとも1つの第2特性を決定するための、第2検出器(42、420〜421)と、少なくとも1つの第1特性および少なくとも1つの第2特性が、所定の条件を満たした場合に、信号を生成するための、信号ユニット(43)と、を備える。さらに、物体を検出する方法であって、光学センサを用いてセンサ信号を生成するステップ(100)と、センサ信号に基づいて第1物体を検出するステップ(101)と、レーダ信号を生成するステップ(200)と、レーダ信号に基づいて第2物体を検出するステップ(201)と、センサ信号に基づいても、レーダ信号に基づいても、同じ物体が検出された場合に、検出信号を生成するステップ(300)と、を備える方法である。また、そのような方法の1つまたは複数のステップを実行するためのプログラムコードを有する、コンピュータプログラムである。 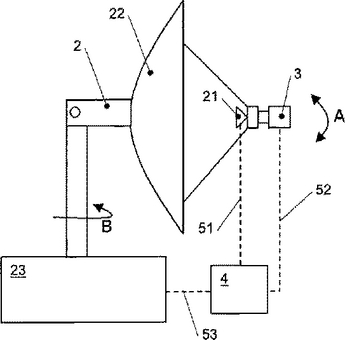 (もっと読む)
(もっと読む)
レーダ装置
【課題】 連続妨害波とパルス妨害波とが混在する複合妨害波の環境下においても、所望のレーダ目標信号を的確に検出する。
【解決手段】 主アンテナ1及び補助アンテナ2を併設したレーダ装置において、第1及び第2の閾値設定手段72,74出力の一致信号を導出する一致信号生成手段73と、この一致信号に基づいてSLC3から出力された信号の振幅を制限して出力する振幅制限手段71とを有する。
従って、たとえSLC3から出力される主CH信号Ymに大きなパルス妨害波Jp1が残存したとしても、一致信号生成手段73における検出により振幅制限手段71を駆動するので、パルス妨害波Jp1の振幅は制限され、目標信号S1,S2は良好なS/Nのもとで検出表示できる。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
誘導装置
【課題】 従来は、目標に向け電波を送信し、目標から直接反射信号を受信して目標信号を検出し追尾しており、目標からの反射波が海面や地表面等のクラッタ信号の受信時、目標方向と異なる方向に目標がいると認識しマルチパスを追尾し、誤ロックしていた。
【解決手段】 従来、単一偏波での送受信を行っていたが、本方式は、水平偏波による送受信(HH信号)と垂直偏波による送受信(VV信号)の2種類の偏波方式での送受信方式とした。目標からの直接反射波と、海面や地表面を経由するクラッタ反射波(マルチパス)では、HH信号とVV信号で位相差が180度ずれる。この位相差を用いて信号処理することにより、目標からの直接反射信号とクラッタ反射波(マルチパス)を分離し、クラッタ反射波(マルチパス)の影響を受けずに目標に追尾し、ロックオンを保持することが可能になる。
(もっと読む)
車載レーダ装置
【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
自動吐水制御装置
【課題】 自動吐水制御装置を持つ洗面台で、検知対象物の進入角度、進入位置の如何に関らず、洗面台の上方空間に進入する検知対象物を確実に検知して吐水を行うようにする。
【解決手段】 マイクロ波センサ7はアンテナ51と、アンテナ51を励振して電波ビームを放射させると共に受信した反射電波の信号からドップラ信号を生成するドライバ回路53とを有する。ドライバ回路53はアンテナ51を操作して電波ビームの放射方向をシンクの上方空間領域からシンクの底部領域へ、又はこれとは逆に切替える機能を持つ。コントローラ部9はドライバ回路53からドップラ信号を入力し、手の進入や手洗いの継続などを判断し、この判断結果に応じて水栓機構に接続されるバルブ5の開/閉制御を行ったり、電波ビームの放射方向の切替え指示をドライバ回路53に与えたりする。
(もっと読む)
誘導弾システム
【課題】 妨害波を発射しながら進入する航空機等の目標に対して、システム規模を増大させることなく、かつ1つの射撃単位のシステム構成で対処する誘導弾システムを得る。
【解決手段】 射撃統制装置2内のレーダ波送受信部(1)21からのレーダ波により対象目標を探知し、その目標情報を信号処理部22で取得し、さらに目標位置予測部23を設けて、目標情報から対象目標の位置を得る。そして、対象目標からレーダ波に対する妨害波が発射され目標情報の取得が妨害されている状況では、妨害波の到来角度情報を継続して取得し、これを既に妨害波のない状況で取得済みの位置に対する予測処理のパラメータとして適用することによって、継続的に対象目標の位置を得る。
(もっと読む)
情報技術(IT)機器測位システム
【課題】データセンタ内の機器の位置を特定するシステム又は方法を提供する。
【解決手段】データセンタ(102)で使用される情報技術(IT)機器測位システム(100)は、前記データセンタ(102)の複数の場所に分散される複数の無線トランスポンダ(104)と、該複数の無線トランスポンダ(104)に結合されたコントローラ(106)であって、三角測量を使用して、前記データセンタ(102)に配置された無線タグ付き情報技術機器(108)に対する3次元座標での位置を特定し検出するように、前記トランスポンダ(104)を動作させるように適合されたコントローラ(106)と、を具備する。
(もっと読む)
二次監視レーダ制御装置及び二次監視レーダ制御方法
【課題】航空機を確実に捕捉可能な二次監視レーダ制御装置及び二次監視レーダ制御方法を提供する。
【解決手段】 航空機の未来位置範囲が所定の切替値以下である場合、質問信号の単位時間あたりの送信回数を定めた送信回数基準値に則り質問信号を送信させ、未来位置範囲が基準値以上である場合、基準値に定められた値より減じた回数で質問信号を送信させる送信制御部91を設ける。
(もっと読む)
不要波抑圧装置
【課題】 アンテナのサイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧することができる不要波抑圧装置を得ることを目的とする。
【解決手段】 ディジタルマルチビーム形成部5により形成された受信ビームのビーム信号を複数の帯域に分割するDFB6−nと、そのDFB6−nにより分割された複数のビーム信号に荷重計算部10により計算された荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要信号のレプリカを生成する加算器14等とを設け、そのDFB6−nにより分割された複数のビーム信号の中から主ビーム方向に対応している注目帯域のビーム信号から不要信号のレプリカを減算する。
(もっと読む)
誘導弾システム
【課題】 ホバリング中のヘリコプタに対しても効果的に対処できる、電波センサを用いた誘導弾システムを得る。
【解決手段】 電波センサとして、要撃管制装置1側に送受信部(1)11及び信号処理部(1)12を、また誘導弾側に送受信部(2)21及び信号処理部(2)22をそれぞれ備え、これら電波センサにより回転翼を有する対象目標を検出し、その目標情報を取得する。また、要撃管制装置1側での要撃計算の結果として対象目標との予想会合点とともに、所定のホーミング時間が確保された上方円弧状の飛翔経路情報、及びゲインを算出し、これらを誘導弾2側に指示する。さらに、誘導弾2におけるホーミング誘導計算の実行時には、操舵量に対するゲインとして、要撃管制装置1側で取得したゲインと誘導弾2側で取得したゲインとを相補的に適用し、対象目標への誘導接近中における良好な誘導精度を維持する。
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
レーダ装置
【課題】 車両前方において広範囲での電波の送受信を可能にするとともに、加飾性に優れるレーダ部を備えるレーダ装置を提供することを目的とする。
【解決手段】 車両前部に設置され車両前方における電波の送受信を行うレーダ装置において、レーダ本体1の送受信部を車両後方に向けて設置するとともに、後方に設置した反射板2により反射させた電波を車両前方に向けて発信するように構成したことにより、後方に向けた送受信部を有するレーダ本体1によって、車両前方において広範囲での電波の送受信を可能にするとともに、車両前方を向いたレーダ本体1の背面等に加飾5を施すことが可能になり、車体前部の見栄えを向上させることができる。
(もっと読む)
301 - 320 / 362
[ Back to top ]