
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
341 - 360 / 362
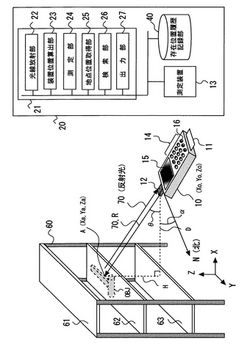
位置検索装置、位置検索システム、位置取得装置、位置検索方法、位置収集装置、位置収集方法、プログラムおよび記録媒体
【課題】簡易に使用でき製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用できる製品の位置検索システム等を提供する。
【解決手段】位置検索装置10を過去に物体OBJが存在したと思われる地点Aへ向けて入力装置16等を押下すると検索開始指示情報が入力される。光線放射部22が照射光源12に光線70を放射させて地点Aを指示し装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報を算出する。測定部24が測定装置13に対し地点Aとの距離R、仰角θ及び方位角αを測定させ地点位置取得部25は上記位置情報と距離R等に基づき地点Aの位置情報を求める。検索部26は上記地点Aの位置情報及び入力された時期情報に照合する履歴を存在位置履歴記録部40から検索し出力部27は当該履歴中で最新の時期情報に対応する位置情報を物体OBJの現在位置として出力装置15へ出力する。
(もっと読む)
車両の駐車過程用の幾何学的形状データを検出するための方法
車両の駐車過程用の幾何学的形状データを検出するための方法において、車両が駐車スペースに沿って側方を走行する間、複数回に渡り、相前後し、車両と車道縁との間の側方間隔が、車両固定式で配設されている間隔センサを用いて測定される。車両縦軸線と車道縁との間の角度が次の検出により決定される、即ち、駐車スペースに沿った走行時に車両の横運動から得られる、目下の車両縦方向と規定の縦方向との間の横運動角度を検出すること、車道縁の輪郭延在態様から得られる、規定の縦方向と車道縁との間の車道縁角度を検出すること、及び、横運動角度と車道縁角度とを加算することによって目下の車両縦軸線と車道縁との間の角度を検出することである。 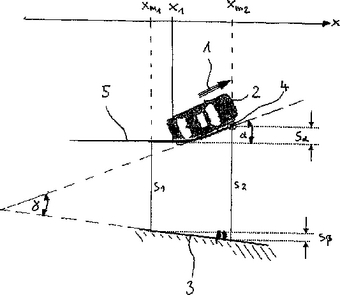 (もっと読む)
(もっと読む)
レーダ装置

【課題】構成簡易にして広い角度範囲にわたり高い測角精度を得ることの可能なレーダ装置を提供すること。
【解決手段】位相モノパルス給電系をもつレーダ装置において送信パルスを分割し、それぞれ周波数を異ならせて異なる方向に送信する。受信期間においてΣビームを形成したのち送信ビームの周波数の差異に基づいて受信ビームを分離する。そして、分離された受信ビームのそれぞれの信号を用いて、スクイント測角に相当する測角処理を実施して目標の測角値を得るようにした。
(もっと読む)
車載用レーダ
【課題】
車載レーダにおいて、路面・自車・レーダ自身に起因するノイズを低減し、小型軽量かつ低コストでロードクラッタを防止し、検知性能を向上させたレーダ装置を提供する。
【解決手段】
直線偏波を放射する1又は複数の放射素子を有したアンテナと、このアンテナ面の前方に配置された金属板に複数のスリットを設けたスリット板と、アンテナとスリット板の間に発泡材を設けたことを特徴とする。
【効果】
アンテナの給電線路からの交差偏波が主成分となるサイドローブを低減でき、ロードクラッタを防止できる。また、固有振動数が車両の振動数以下となるスリットの共振を低減し、ノイズを抑制することができる。それによって、レーダ装置として優れた検知性能が得られる。
(もっと読む)
レーダ装置
【課題】目標の移動速度によらず高い測角精度を得られるレーダ装置を提供すること。
【解決手段】予測フィルタにより算出された1の予測点の近傍に複数の予測点を追加設定し、各予測点ごとに個別に合成開口処理を実施する。そして、これにより算出されたアンテナパターンを用いて受信利得の最も高い予測点を選択し、この予測点につき合成開口されたデータを用いて測角処理を実行するようにする。これによりただ一つの予測点でなく、複数の予測点を合成開口ポイントの候補として用いることができ、これらから最も信憑性の高いポイントのデータを用いて測角処理を実施できるようになる。従って予測フィルタにより算出された予測位置が現実とずれた場合でも、測角精度を高精度に保つことが可能となり、ひいては、目標の移動速度によらず高い測角精度を得られるレーダ装置を提供することが可能になる。
(もっと読む)
車両周囲監視装置およびそれを具備した車両
【課題】 1つのセンサで車両周囲の広い領域が監視可能となる車両周囲監視装置およびそれを具備した車両を提供する。
【解決手段】 本発明の車両周囲監視装置は、物体の存在を検知する、あるいは物体までの距離を計測するセンサ1と、センサ1からの情報に基づいて車両100と物体との衝突などの危険度を判断する処理部3とを有する。センサ1は、車両の車輪側面に固設され、車両100が走行した際、センサ1とそのビームBとが車輪回転軸を中心に回転する。これによって、車両100が走行した場合、センサ1が検知する領域をセンサ単体の検知領域より広くすることができる。
(もっと読む)
発射された発射体の実際の方向と、所定の方向と、の間の偏差を、測定する方法及び装置
所定の進路から発射体の進路の偏差を測定する方法。前記方法は、所望された進路又は方向が指摘された、ターゲット領域における画像を用いる。その後、実際の方向又は進路が測定され、偏差が測定される。  (もっと読む)
(もっと読む)
飛翔体およびその誘導制御方法
【課題】 飛翔体の運用状況により発生する目視線回転角速度の検出誤差等による飛翔体の誘導精度の劣化を防止する。
【解決手段】 レドーム内に収納され、このレドーム外にある目標物の見かけの目視線方向を検出する目標物検出手段と、飛翔体を誘導するための誘導信号指令値を出力する誘導信号計算装置と、誘導信号指令値と飛翔体運動検出センサの検出値とを入力し、飛翔体の姿勢を制御する姿勢制御手段に姿勢制御指令値を与えるオートパイロットとを備えたものにおいて、オートパイロットが、誘導信号指令値と飛翔体運動検出センサの検出値との差である制御誤差信号を複数の周波数成分信号に分離する分離器を備え、該分離器で分離された各信号に対応して各々飛翔体に回転又は並進運動を与える姿勢制御指令値を姿勢制御手段に出力するようにした。
(もっと読む)
目標追尾装置
【課題】既追尾目標から複数の目標が分離する状況において、高い推定精度を達成する目標追尾装置を得る。
【解決手段】距離情報算出部と、単数複数判定部と、単数角度情報算出部と、複数角度情報算出部と、観測結果出力部とを有する観測情報抽出部と、データ記憶部と、軌跡推定部と、軌跡評価部とを有する追尾処理部とを備える目標追尾装置において、追尾処理部は、単数複数判定部で判定された単複判定結果に基づいて、単数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説のみを残し、複数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説を残すとともに、既存の本航跡から分離発生した新目標に相当する航跡の仮説を残す仮説限定部をさらに備える。
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 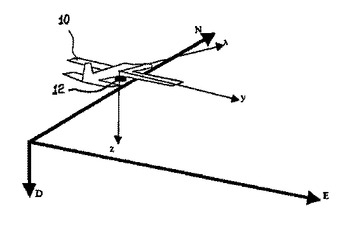 (もっと読む)
(もっと読む)
人員携行型対迫レーダシステム
本発明は、敵軍の飛行迫撃砲弾を検出して追尾し、その原点(出射点)を算出して迫撃砲および砲兵への対策を講じる人員携行型対迫レーダ(MCMR)システムである。更に、MCMRは、飛行機、ヘリコプタおよび地上車両を検出して追尾することにより防衛監視を行える。MCMRは運搬のために分解可能であり、現地で迅速に組み立て、敵軍の迫撃砲による攻撃に対して360度の探索可能領域を提供する人員携行型レーダシステムである。MCMRは、レーダパルスを放射し反射された目標エコーを受信するアンテナと、アンテナから放射すべきレーダパルスを発生させる発信機と、目標エコーに関する測定(範囲、方位および仰角)を行い、多重エコーを関連づけて目標軌道を発生させ、迫撃砲弾として軌道を分類し、迫撃砲兵器の推定位置を計算する受信機プロセッサと、レーダを運転し処理済みのレーダデータを表示および解釈することができる制御および表示コンピュータとを備える。 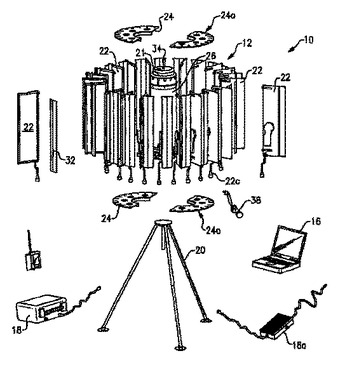 (もっと読む)
(もっと読む)
レーダセンサ
パルスエコー方式によるレーダセンサにおいて、広いアンテナ特性をもつ第1の受信アンテナ(6)と、狭いアンテナ特性をもつ第2の受信アンテナ(17)が設けられている。さらに受信経路中に、2つの受信アンテナの受信信号を送信レーダパルスのパルス繰り返し周波数のタイミングで切り替える切替手段(18)が設けられている。 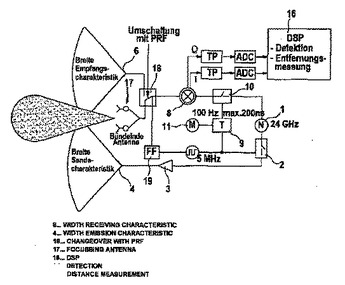 (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
レンジ、レーダ感度、及び角度精度の強化のための複数レーダ結合
複数のレーダの信号を合成して、レンジ、レーダ感度、及び角度精度の強化を達成するためのメカニズムが提供される。第1信号ビームは、第1レーダのアンテナから目標物の方向に放射される。第2信号ビームは、第2レーダのアンテナから同じ目標物の方向に放射される。第1信号ビーム及び第2信号ビームからのエコー信号は、両方のレーダにおいて受信される。第1レーダにおいて受信したエコー信号は処理されて、第1レーダ処理済みエコー信号が生成され、第2レーダにおいて受信したエコー信号は処理されて、第2レーダ処理済みエコー信号が生成される。第1及び第2レーダ処理済みエコー信号は、集約値を形成するために合成される。 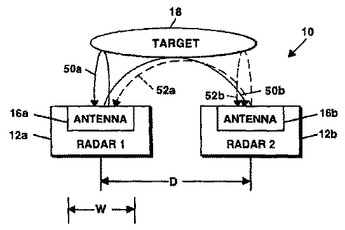 (もっと読む)
(もっと読む)
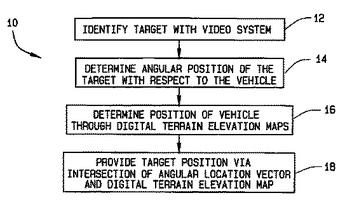
ターゲット位置特定のためのシステムおよび方法
ビークル(102)からターゲット位置を決定する方法が説明される。この方法は、ビデオシステム(124)を使用してターゲット(100)を識別するステップ(12)、ビークルに関するターゲットに対する角度位置ベクトル(104)を決定するステップ(14)、デジタル地勢高度図(122)および精密レーダ高度計(30)を使用してビークルの位置(108)を決定するステップ(16)、角度位置ベクトルがデジタル地勢高度図と交差する位置を計算するステップ、およびビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)を含む。
 (もっと読む)
(もっと読む)
安全確保のデータ伝送およびサテライトネットワーククロスリンクのためのマイクロ波自動同調アンテナアレー
【構成】 高方向性トランスポンダはデータ信号ピークを呼掛け器ソースに送信する逆方向性アレー(図1)とナルを呼掛け器に向けて送信しかつその他に妨害信号を送信する自動ナル操縦アレー(図1)の二重システムを用い、呼掛け器ソースにおいて高SN比と妨害の回避を得る。変調器を集積することによって各アレーは送信された信号のスペクトルが同一である異なったデータを送信でき、これによって妨害を不可能にする。このシステムは、安全確報の2点間通信を可能にし、かつ無線LANおよびRFIDサーバのような短距離の無線データ通信システムに用いられることができる。他の特徴として、自動操縦信号伝送が、回転偏向、二次元逆方向性アレーを用いることにより、ランダムに向いたサテライトに対して用いられる。4倍低調波混合が、高周波数LOが実現可能でなく適用できないとき、位相共役を達成する有効な手段として用いられる。これらの特徴は、小型サテライト通信、安全確報の軍事通信、探査および救助、敵位置決定追跡、UAV命令および制御、森林火災検出、海上追跡、および高信号方向性を伴った安全確保を要する多くの他の用途に対して用いられてもよい。 (もっと読む)
合成開口レーダシステム及び局所的な測位のための方法
測位システムは、固定された位置にあるパッシブな等方性反射標識と、デバイスとを含む。前記デバイスは、ある期間に渡って、円偏波を有する電磁パルスを送信し、帰還信号を受信する。前記帰還信号は、前記反射標識から反射されたパルスを含む。前記帰還信号から前記反射パルスを隔離するため、及び前記デバイスから前記反射標識への距離を決定するために、前記帰還信号を処理する。前記反射標識は、第1のパッシブ反射体と、第2のパッシブ反射体と、前記第1のパッシブ反射体を基準にした角度で前記第2のパッシブ反射体を静止して測位するように構成される静的構造とを含む。オプションとして、前記デバイスは、前記帰還信号を受信中に、ある特定の方向に移動し、前記帰還信号の前記反射パルス部分におけるドップラーシフトを検出し、前記特定の方向と、前記デバイスと前記標識間の直線との間の角度を決定する。
 (もっと読む)
(もっと読む)
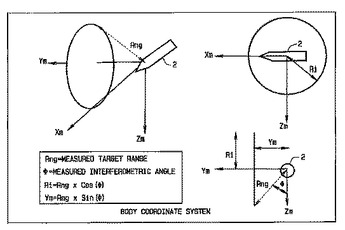
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
車載レーダ装置
【課題】 車両取付時の放射軸調整が容易な車載レーダ装置を提供する。
【解決手段】 レーダ放射軸L1とレーザポインタ光軸L2の水平座標が略一致するように、レーダ装置1にレーザポインタ7を一体的に固定する。このときに生じたレーダ放射軸L1と光軸L2との水平方向のズレ角は角度記憶手段4に記憶しておく。レーダ装置1は、目標物に向けて発したレーダの反射波より、水平角度算出手段3で目標物の水平角度位置を算出し、さらに、この算出した水平角度位置を、角度記憶手段4に記憶しておいた角度値を用いて補正する。
(もっと読む)
341 - 360 / 362
[ Back to top ]