
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
261 - 280 / 873
レーダ装置
【課題】レーダ装置における演算処理の負荷を軽減しつつ、ターゲットまでの距離を推定する。
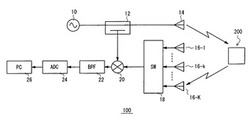
【解決手段】複数の周波数を有する送信信号を送信波として出力する送信アンテナ14と、物体からの送信信号の反射波を受信する複数の受信アンテナ16と、送信アンテナ14から送信された送信信号と受信アンテナで受信された受信信号とを混合するミキサ20と、を備えるレーダ装置100で、複数の周波数の送信信号の各々について受信アンテナ16の各々で受信された受信信号に対してミキサ20で得られるビート信号を周波数解析すし、ドップラ周波数を検出し、ドップラ周波数毎に、受信アンテナ16と送信信号の周波数との組み合わせ毎に検出されたドップラ周波数の位相情報を受信アンテナ16及び複数の周波数について定められた順に並べた行列とその複素共役転置行列とから相関行列を求め、相関行列に基づいてターゲットまでの距離を推定する。
(もっと読む)
不審者検知装置、不審者検知システム及び不審者検知方法

【課題】複数の不審者が侵入した場合においても、不審者の数及び不審者の位置を特定すること。
【解決手段】遅延時間変化解析部105は、広帯域なパルス信号が送信されてから、当該パルス信号が反射源により反射されて到来波として受信されるまでの遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分を抽出し、反射源判定部106は、入力される到来波の遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分に基づいて、到来波の反射源が、人体等の呼吸、心拍を伴う動体か、壁又は什器等の固定物体かを判定するようにした。また、送信パルスに広帯域なUWBパルス信号を用いることにより、時間軸上で到来波が分離されるため、エリア内に侵入した不審者を検知し、不審者の数を検出することができる。
(もっと読む)
受信装置および受信方法
【課題】受信装置および受信方法を提供すること。
【解決手段】放射体から発せられた信号を受信する第1の数(3以上の整数)のアンテナと、接続されているアンテナにより受信された前記信号に対するアナログ処理を行う第2の数(2以上の整数、第2の数<第1の数)のアナログ処理部と、1のアナログ処理部と1のアンテナを接続している間、他のアナログ処理部に接続するアンテナを順次に切り替える接続切替部と、前記1のアンテナを介して前記1のアナログ処理部により得られた信号と、同一時間帯に他のアンテナを介して前記他のアナログ処理部により得られた信号との伝達関数の差分を取得する伝達関数取得部と、異なる時間帯に得られた信号に基づいて前記伝達関数取得部により得られた前記伝達関数の差分の各々に、前記他のアナログ処理部と接続されていた前記他のアンテナに対応する指向用重みを乗算する乗算部と、を備える受信装置。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、区間判定部11を備える。区間判定部11は、受信信号をサンプリングした受信データ系列の中から、所定の距離範囲内の受信データを抽出し、当該抽出された受信データに基づいて、当該距離範囲が「陸/物標区間」であるか「雨雪/ノイズ区間」であるかを判定する。このレーダ装置は、受信データに含まれる雨雪反射を、雨雪反射除去閾値に基づいて抑圧するように構成される。内部データ根拠閾値算出部14は、「雨雪/ノイズ区間」であると判定された距離範囲についてのみ、当該距離範囲内の受信データに基づいて、当該距離範囲に対する雨雪反射除去閾値としての内部データ根拠閾値を求める。
(もっと読む)
目標追尾処理器及びそれに用いる誤差共分散行列の補正方法
【課題】 観測値の入力頻度が低下した場合、または観測値の入力が無くなった場合においても、誤差共分散が過度に大きくなったり、異常な値となったりすることを防止することが可能な目標追尾処理器を提供する。
【解決手段】 目標追尾処理器は、目標の位置を観測するセンサの観測値からその目標の位置、速度及び針路を状態変数として推定するカルマンフィルタを用いた目標追尾を行う。また、目標追尾処理器は、状態変数の分散を表す誤差共分散を補正する手段(ダミー作成起動部20、ダミー観測時刻作成部21、ダミー観測値作成部22)を有する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
車両用レーダセンサ
本発明は、レーダ光線源と、当該光線源の前に配置され、レーダ光線を屈折させる素材から成り、少なくとも一方の側に凸表面(14)を有するレンズ(12)と、を備えた車両用レーダセンサにおいて、凸表面(14)が、方位角(Y1、Y2)よりも仰角(Z1、Z2)においてより強い湾曲を有することを特徴とする、上記レーダセンサに関する。 (もっと読む)
モードS二次監視レーダおよび航空機監視方法
【課題】モードS二次監視レーダにおけるビームスケジュールの使用効率の低下を抑制するとともに、航空機の監視の精度および信頼性を向上する。
【解決手段】監視対象の航空機からのモードS個別応答信号が得られず、モードS個別応答信号による監視が継続できなくなった場合、監視処理部133は、監視対象の航空機から送信されたモードS拡張スキッタに含まれる航空機の位置情報を用いて、次スキャンにおけるその航空機の予測位置およびそれに応じた予測範囲を算出し、チャネル管理部134は、監視処理部133でモードS拡張スキッタを用いて算出された予測範囲に応じたモードS個別質問応答のスケジューリングを行う。
(もっと読む)
レーダ信号処理装置及びレーダ信号処理方法
【課題】レーダ信号処理における処理負荷を軽減し、処理速度を向上する。
【解決手段】レーダ信号処理装置は、反射波の受信信号を方位単位で分配して処理させる入力ラウンドロビン制御回路71と、方位単位の受信信号をもとに不要波を抑圧するように合成ビームを形成するためのウェイトを算出する複数のウェイト算出部72と、ウェイトにより方位単位の受信信号に対して重み付けして合成ビームを形成するビーム合成部76とを備え、ウェイト算出部72は、方位単位の受信信号を距離方向に複数のレンジデータに分割し、第1レンジウェイト算出回路73でレンジデータの前半部分から第1ウェイトを算出すると共に、第2レンジウェイト算出回路74でレンジデータの後半部分から第2ウェイトを算出し、ビーム合成回路76は、第1ウェイトによりレンジデータの後半部分を重み付けし、第2ウェイトによりレンジデータの前半部分を重み付けする。
(もっと読む)
物体検知方法
【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
パルス変調信号特定方法及びパルス変調信号識別方法並びにパルス変調信号識別装置
【課題】 レーダ信号識別装置においてパルス変調信号特定やパルス変調信号識別で行っていた多ビット高レートのA/D変換及びFFT等の大量の計算処理をすることなくビデオパルス信号の特徴を検出し、その特徴を用いてパルス変調信号の識別処理を高性能でより高速に処理することが可能である新規なパルス変調信号特定方法及びパルス変調信号識別方法並びにパルス変調信号識別装置を提供すること。
【解決手段】 パルス変調信号から成る到来電波を包絡線検波して得られるビデオパルス信号を所定の帯域ごとに分離し、その分離した前記ビデオパルス信号のゼロ交差点を前記所定の帯域ごとに所定の範囲内において検出し、前記所定の帯域ごとのゼロ交差点をビデオパルス信号の特徴として前記到来電波のパルス列を特定することを特徴とする。
(もっと読む)
レーダの軸ずれを判定する装置
【課題】車両に搭載され、前記車両の側方に向けて電磁波を放射すると共に、反射した該電磁波を受信して物体の距離および方位を検出するレーダを提供する。
【解決手段】車両の車速を検出し、該車速が所定値以上の時、少なくとも検出した距離に基づいて、多重反射が生じているかどうかを判定する。多重反射が生じていると判定されたならば、該多重反射の反射波について検出された方位と、所定の基準方位との差に基づいて、レーダの軸ずれを判定する。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の方向行列の位相を回転し、位相回転された方向行列を含む相関行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の各周波数における方向行列を所定の周波数における方向行列へ変換し、所定の周波数における方向行列の位相を回転し、位相回転された方向行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
レーダ画像処理装置
【課題】本発明の課題は、目標物の大きさや形状の表示を理想の画像に近づけて、違和感無くオペレータに提供出来るレーダ画像処理装置を提供することにある。
【解決手段】本発明は、2重パルス式航法気象レーダ装置のレーダ画像処理装置において、受信レーダ画像信号をデジタル信号に変換し、短パルスの受信信号のノイズレベルを超える信号を検出し、長パルスの受信信号と短パルスの受信信号の強度差に準じた定数を加える第1の加算器22と、前記第1の加算器22の出力信号に、該出力信号の一つ前の出力信号に定数を掛けた信号を加える第2の加算器26と、長パルスの受信信号を圧縮処理した長パルス処理信号と、前記第2の加算器26から得られた短パルス処理信号とを合成処理する合成処理器16とを具備することを特徴とするものである。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
261 - 280 / 873
[ Back to top ]