
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
221 - 240 / 873
電子キーシステムのキー位置判定装置
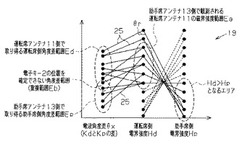
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
レーダ情報表示装置

【課題】投影方法を切り替えてもレーダ情報や地図情報が表示されるまでの遅延を少なくすることができるようにする。
【解決手段】レーダ情報記憶バッファ210および地図情報記憶バッファ220は、それぞれが2つの記憶バッファ211(221),212(222)と、当該記憶バッファの一方を記憶情報の読み出し状態にした場合に他方を更新情報の書き込み状態となるように切り替えるバッファ切り替え手段213(223)とを有しており、座標変換手段240と画像生成手段230による表示画像生成処理は、所定の周期で、かつ当該周期内の一定の期間に割り当てて繰り返して行い、レーダ情報記憶バッファ210および地図情報記憶バッファ220の更新情報の書き込み処理は、所定の周期内の残りの期間に割り当てて任意の時期に行う。
(もっと読む)
目標相関処理装置、目標相関処理方法及びプログラム
【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
(もっと読む)
電子走査型レーダ装置及びコンピュータプログラム
【課題】上方構造物の検知を判別する電子走査型レーダ装置を提供する。
【解決手段】送信波を送信する送信アンテナ3と、送信波が対象物に反射した受信波を受信する受信アンテナ11から1nと、受信波の強度を算出する受信強度算出部22と、受信波に基づいて前記対象物までの距離を検出する距離検出部24と、距離が狭まるに連れて前記受信波の強度が減少する場合、前記対象物を上方構造物と判定する上方構造物判別処理部28とを有する。
(もっと読む)
検出装置
【課題】 非検出物体の速度、距離、方位、大きさを検知可能な検出器を提供する。
【解決手段】
発振器と送信伝送部と送信アンテナとを含む送信部と、受信アンテナと送信部からの信号と受信アンテナからの信号を混合し中間波信号を出力するミキサとを含む、2つ以上の受信部とを設ける検出装置である。これにより、非検出物体の速度、距離、方位、大きさを検知可能となり、例えば自動ドアの開閉システムに適応したときに誤作動を少なくすることができる。
(もっと読む)
レーダ装置および探知方法
【課題】反射波の中からマルチパスを判定し削減することで、その影響を低減し、目標物の検知精度を向上させるレーダ装置および探知方法を提供する。
【解決手段】 目標物を検知するレーダ装置であって、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、を備えるレーダ装置である。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
2次監視レーダ及び信号処理方法
【課題】電波障害時であっても機上からの情報を正しく復号可能にすること。
【解決手段】2次監視レーダ装置は、ターゲットに対して複数の質問を送信する送信部23と、前記ターゲットから送られてくる前記質問に対する応答を受信する受信部22と、前記ターゲットの方位及び距離をもとに前記応答のタイミングを予測し、前記タイミングに基づいて前記複数の質問に対する応答の受信判定を行い、前記受信判定において受信できなかった応答を受信するために質問を再送し、前記受信された応答の順番を並べ替え、前記順番に基づいてターゲットレポートを作成する信号処理装置3とを具備する。
(もっと読む)
レーダ装置
【課題】近距離探知と遠距離探知とを実現可能であり、かつ、装置全体の小型化、簡単化及び低コスト化を実現することが可能なレーダ装置を提供する。
【解決手段】レーダ装置が近距離探知を行う場合には、信号処理装置10からの制御信号に従い、近距離探知時の受信信号を前段受信処理部51の低利得回路を介して後段受信処理部52へ導出する。また、レーダ装置が遠距離探知を行う場合には、信号処理装置10からの制御信号に従い、遠距離探知時の受信信号を前段受信処理部51の高利得回路を介して後段受信処理部52へ導出する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
無線センサ装置
【課題】複数のアンテナ間で互いの無線波が干渉することなくアンテナ間のアイソレーションを確保することができ、装置の小型化が図れると共に、発振器に要求されるピークパワーを半減できること。
【解決手段】無線センサ装置10は、アンテナA11,A12に信号発生回路11で生成されるパルス信号を給電して無線波を放射する場合、先のパルス信号がアンテナA11に給電されると同時にミキサ回路15aへ供給された後、当該アンテナA11及びミキサ回路15aに与えた先のパルス信号のパルス幅と重複しない近接タイミングで次のパルス信号がアンテナA12に給電されると同時にミキサ回路15bへ供給されるように、信号発生回路11の動作タイミング及び当該信号発生回路11からアンテナA11,A12までの経路を制御するものである。
(もっと読む)
電磁波発生装置及びレーダ
【課題】アンテナを含む伝送系及び高周波回路を広帯域化することなく、全体の回路規模を増大させることもなく、安定した電磁波を発生する電磁波発生装置及びそれを備えたレーダを構成する。
【解決手段】駆動電圧印加回路40は、トランス41の2次コイルN2に誘起される所定の高電圧をマグネトロン50の陽極51と陰極52との間に駆動電圧として印加する。陽極電流制御回路30は、入力端子INに入力されるパルス信号の立ち上がりによってトランジスタQ31がオンし、FET Q40がオンし、トランス41の1次コイルN1に電流が流れ、トランス41の2次コイルN2の誘起電圧がマグネトロン50の陰極52に印加される。トランジスタQ31のオン時の通電電流とマグネトロン50の陽極電流とはほぼ比例関係にあり、感温抵抗素子RTの抵抗値に応じて陽極電流が制御される。
(もっと読む)
レーダ装置、該レーダ装置に用いられるビーム走査方法及びビーム走査制御プログラム
【課題】フェーズドアレイ方式のレーダ装置の捜索データレートを向上させる。
【解決手段】ビーム走査制御手段(データ処理部6A、方位ステップ数算出部9A、ビーム制御部8)により、アンテナ素子11が平面状に配列されたアンテナアレイの設定された方位監視範囲2*Δθ(方向監視範囲)内の方位角(方向角)におけるアンテナ利得の変動と送受信ビームbm(方位ビーム)の谷のアンテナ利得の相対変動との和を表す最大利得変動Lが設定され、方位監視範囲2*Δθ内の全ての方位角において最大利得変動Lが一定となるように、送受信ビームbmと隣接送受信ビームbmとの重なり率を表すスタックファクタが可変されて送受信ビームbmの方位に対応する方位情報drが生成され、設定されているビームスケジュール及び方位情報drに基づいて、走査方位制御信号tcが生成されて空中線装置1に与えられる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】FM−CW方式と位相モノパルス方式とを併用したレーダ装置において、同じ相対距離と相対速度を有する複数の物標が存在する場合であっても、個々の物標の方位角を正確に検出する。
【解決手段】
一対の物標に対応して一対の前記ビート信号が生成されたときに、第1の物標に対応する前記ビート信号の第1のレベルと第2の物標に対応する前記ビート信号の第2のレベルとを記憶するレベル記憶手段と、一対の物標に対応して単一のビート信号が生成されたときに、当該単一のビート信号のレベルから、前記第1のレベルに対応する第1の位相と、前記第2のレベルに対応する第2の位相を導出する位相導出手段を有し、前記一対のアンテナにおける前記第1、第2の位相の差に基づいて、第1、第2の物標の方位角をそれぞれ導出するので、個々の物標の方位角を正確に検出できる。
(もっと読む)
航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラム
【課題】航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置を提供する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
(もっと読む)
画像表示装置
【課題】電波の発射源を可視化する周波数領域を変更する際に、その操作性を向上させることが可能な画像表示装置を提供する。
【解決手段】スペクトラム波形表示画面におけるフィルタリングエリアを、GUIで使用されるユーザインタフェース部により画面上で操作する。そして、この画面上の操作により、フィルタリングエリアにより選択された周波数帯域が変更された場合、変更後の合成画像を発射源表示画面に表示する。
(もっと読む)
最適位置算出装置、最適位置算出方法およびプログラム
【課題】任意のタイミングで、高精度、かつ、軌道が滑らかな航空機情報を表示する技術を提供する。
【解決手段】最適位置算出装置20は、複数のセンサのそれぞれによって観測された観測データに基づく航空機情報を記憶する航空機情報記憶部210と、前記複数のセンサのうち2以上のセンサを優先センサとして特定するための優先センサ情報を各観測領域に対応付けて記憶する優先センサ情報記憶部200と、航空機の表示位置の更新タイミングにおいて、前記優先センサ情報に基づいて、複数の前記航空機情報のなかから、前記優先センサによって観測された最新の観測データに基づく前記航空機情報を抽出するセンサ選択部240(航空機情報抽出部)と、抽出された前記航空機情報に基づいて、前記更新タイミングにおける航空機の最適位置を算出する最適位置算出部250と、前記最適位置を出力する表示部260(出力部)とを備える。
(もっと読む)
レーダ装置
【課題】超分解能ドップラー周波数の推定精度を改善したレーダ装置を得る。
【解決手段】複数の送信パルスを時系列的に繰り返し出射する送信機1、送信アンテナ2と、複数の送信パルスが目標3で反射された反射パルスを複数の受信パルスとして受信する受信アンテナ4、受信機5と、複数の受信パルスに基づいて、目標3の移動にともなうドップラー周波数を推定する超分解能ドップラー周波数推定手段8とを備えている。超分解能ドップラー周波数推定手段8は、複数の受信パルスの位相変化に基づいて、ドップラー周波数を超分解能推定する。
(もっと読む)
車載用レーダ装置
【課題】レーダ測定座標系の軸ずれ角度の推定処理に必要な演算資源量を減らし、装置サイズを小さくすることができる車載用レーダ装置を得る。
【解決手段】ターゲット情報として方位角度と相対ドップラー速度を測定する測定部14と、ターゲットの相対ドップラー速度と自車の走行速度及び自車の旋回速度に関する条件を満足するターゲット情報を抽出し、新たなターゲット情報として、抽出されたターゲット情報のうち、方位角度と、相対ドップラー速度を自車の走行速度で除算した速度比とを蓄積する抽出蓄積部15と、抽出蓄積部に蓄積されたターゲット情報を読み出して、レーダによる測定座標系の軸ずれ角度をターゲットの方位角度の2次多項式に基づいて推定する軸ずれ角度推定部16とを備える。
(もっと読む)
221 - 240 / 873
[ Back to top ]