
Fターム[5J070AD01]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358)
Fターム[5J070AD01]の下位に属するFターム
送受別体 (672)
Fターム[5J070AD01]に分類される特許
341 - 360 / 686
車両周辺監視装置
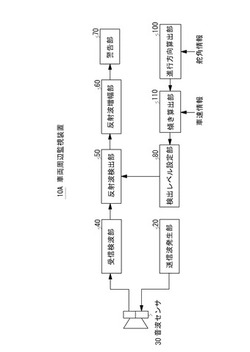
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
リフレクタの位置調整装置と検査方法及び検査装置

【課題】より一層高精度にリフレクタの位置合わせを行なうことができるリフレクタの位置調整装置と検査方法及び検査装置を提供すること。
【解決手段】レーザー発信器30におけるレーザー光の発光口31を通りスクリーン部材300に略垂直な直線を回転軸TAとして、レーザー発信器30を回転方向に等間隔である3点以上で一時的に固定してスクリーン部材300に対して略垂直にレーザー光を照射し、スクリーン部材300におけるレーザー発信器30からのレーザー光が照射された3点以上のスポットの中心に、レーザー発信器30からのレーザー光が照射されるように発信器位置調整部材20にてレーザー発信器30におけるレーザー光の照射方向を調整する。
(もっと読む)
物体検出装置
【課題】反射波信号のサンプリング時間が長い場合であっても、物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、ADコンバータ221から出力されるサンプリング時間ΔT毎の反射波信号を取得する受信信号取得部12と、周囲の物体の画像を撮像するステレオカメラ23を介して、物体との相対速度ΔVを検出する検出部13と、検出部13によって検出された相対速度ΔVから反射波のパルス間隔を求める間隔算出部15と、受信信号取得部12によって取得された反射波信号及び間隔算出部15によって求められたパルス間隔に基づいて、反射波の波形を求める波形算出部16と、求められた反射波の送信波に対する遅延時間を求める遅延時間算出部17と、求められた遅延時間に基づいて、物体との距離を求める距離算出部18と、を備える、
(もっと読む)
探査対象地表面からの高度が変動するアクティブ型側方監視センサの動作を最適化する方法
【課題】探査対象地表面からの高度が変動するアクティブ型側方監視センサの動作を最適化する方法を提供する。
【解決手段】この方法は、探査対象地表面からの側方監視センサの高度を連続的に測定するステップ(S10)と、前記探査対象地表面を走査するために前記側方監視センサから放射されている走査ビームに対して、前記側方監視センサが軌道上を一周している間の前記探査対象地表面の変動を減少させるように、測定により得られた前記側方監視センサの高度に応じて前記走査ビームをロール回転させる調節を施すステップ(S12)とを含む。
(もっと読む)
監視装置
【構成】管理品無線通信タグ(200)および管理者無線通信タグ(300)に基づいて管理対象品(100)の監視を行う監視装置であって、管理品無線通信タグに基づいて管理対象品の存在を検出する第1検出手段(16、34)、管理者無線通信タグに基づいて前記管理者の存在を検出する第2検出手段(16,34)、管理品無線通信タグからの電波に基づいて管理対象品の位置の変化量に応じた値を特定する特定手段(34e)、変化量に応じて時間を計測する計時手段(27)、第1検出手段の検出結果、前記第2検出手段の検出結果、前記特定手段の特定結果、および前記計時手段の計時結果の少なくとも1つに応じて警報を出力する制御手段(16、36、28e)を備える。
【効果】状況に応じて的確な警報を出力することができる。
(もっと読む)
レーダ装置
【課題】3種類以上の周波数変調を用いることで、各周波数変調で検出されたピークビート周波数の順番や振幅、位相情報といったものを使用せずに、正しい組み合わせを求めることができるレーダ装置を得る。
【解決手段】4種類の周波数変調を重畳した送信周波数を持つ送信信号を生成する信号発生器1と、前記送信信号を分割する分配器2と、分割された送信信号を空間へ放射する送信アンテナ3と、目標で反射された受信波を取り込む受信アンテナ4と、分配器2からの送信信号と受信アンテナ4からの受信信号を混合してビート信号を生成するミキサ5と、前記ビート信号をアナログ信号からデジタル信号に変換するA/D変換部6と、A/D変換部6からのビート信号に基づいて前記目標までの距離及び前記目標の速度を求める信号処理部7とを設けた。
(もっと読む)
電波センサ
【課題】 部品バラツキがある場合でもパルス幅に対する積分時間を適切に設定可能であり、所定周期でパルスを発生する無線信号を用いて物体までの正確な距離を検出することができる電波センサを提供する。
【解決手段】 所定周期でパルスを発生する無線信号をアンテナ2を介して送信する送信部1と、無線信号を受信するアンテナ2と、受信した信号を包絡線検波して検波信号を出力する検波ブロック3と、検波信号を積分期間において積分する積分回路5と、検波ブロック3の出力に含まれるパルスに対する積分期間を当該パルスに同期させる位相制御部8と、積分値をデジタル信号に変換するA/D変換器6と、A/D変換器6の出力に基づいて、送信パルスと受信した反射波のパルスとの位相差に基づいて物体までの距離を算出する信号処理部7と、積分時間を変動自在に設定する積分時間制御部9とを備える。
(もっと読む)
アクティブセンサ
【課題】送信及び受信用アンテナを有し、電波を送受信して被検出体の存在を検知するアクティブセンサにおいて、送信用アンテナの半値角に基く検知エリア端における検知感度を向上させ、より正確に被検出体を検知する。
【解決手段】センサ1は、RF信号の電波を送信する送信用アンテナ12と、送信された電波の被検出体からの反射波を受信する受信用アンテナ13とを有し、電波を送受信して被検出体の存在を検知する。受信用アンテナ13の半値角θ2による受信エリア30内に送信用アンテナ12の半値角θ1による送信エリア20を配置し、半値角θ2を半値角θ1より大きくする。これにより、送信用アンテナ12の半値角θ1の送信エリア20の端における検知感度が向上する。
(もっと読む)
無線タグ距離測定装置および無線タグ距離測定システム
【課題】無線タグ距離測定装置において、距離測定を行うための事前処理を容易にすることを目的とする。
【解決手段】無線タグ距離測定装置10は、拡散処理が施されていないパルス変調信号を送信する。各無線タグは、無線タグ距離測定装置10から送信されたパルス変調信号を受信する。そして、自らに固有に割り当てられたPN符号によってパルス変調信号に拡散処理を施し、拡散処理後の信号を拡散パルス変調信号として送信する。無線タグ距離測定装置10は、各無線タグから送信された拡散パルス変調信号に基づいて各無線タグの固有割り当てPN符号を検出する。無線タグ距離測定装置10は、測定対象PN符号記憶部20に記憶されているPN符号を用いて無線タグまでの距離を測定する。
(もっと読む)
モードSシミュレータ
【課題】信号の輻輳や重畳、フルーツ妨害が発生した場合のモードS二次監視レーダの性能を検査するための信号を生成する。
【解決手段】検査対象として想定される状況に存在する航空機の識別子、航空機の位置及び航空機の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部D2と、モードS二次監視レーダ2が航空機に送信した質問信号を入力すると、機体データから、質問信号の送信対象の位置に存在する航空機の送信信号の情報を抽出し、又は質問信号が含む識別子の航空機の送信信号の情報を抽出する応答機検索器136と、抽出した複数の送信信号の情報に基づいて生成された信号を合成して、模擬信号として生成する応答発生器137とを備える。
(もっと読む)
レーダ断面積測定方法および測定装置
【課題】送信アンテナと受信アンテナが分離したバイスタティックの場合で、屋外の地面反射が含まれる環境下に適用可能にする。
【解決手段】送信アンテナ1と受信アンテナ2とがバイスタティック角βを成して分離している地面反射を利用したレーダ断面積測定方法であって、被測定物3をAz方向およびEl方向に、それぞれ、±φw/2、±θw/2だけ回転させて、その角度範囲の散乱電界値Es(θ,φ)を測定し、送信アンテナ1と受信アンテナ2間のバイスタティック角β分の歪みを補償するとともに、地面反射により被測定物で生じる照射電界分布を補正しながら、測定した散乱電界値Es(θ,φ)を反射源分布である等価散乱係数Se(y,z)に変換し、変換により得られた当該等価散乱係数Se(y,z)を被測定物3相当の範囲で積算して遠方領域でのレーダ断面積σを得る。
(もっと読む)
反射電磁波画像化システム
【課題】航空機など立体構造の対象物を画像化する場合、焦点が外れても画像がぼけないようにする。
【解決手段】対象物に中心部のエネルギー強度の強い平行ビームの電磁波を送信し、その反射波を平行ビームを受信するアンテナで受信し、その送信部及び受信部を一体にして上下、左右に移動させることにより反射電磁波の画像化を行う。
(もっと読む)
レーダ装置
【課題】方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。
【解決手段】アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から前記複数の個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタとを備えた。
(もっと読む)
バイスタティックレーダ装置
【課題】送信側と受信側の距離が未知であって、かつ、時刻同期をとらなくても目標位置を同定できる安価なバイスタティックレーダ装置を提供する。
【解決手段】目標および第1レーダ装置に向けて電波を送信する第2レーダ装置と第1レーダ装置とを備え、第1レーダ装置は、第2レーダ装置を検出するモノスタティック検出器3aと、検出された第2レーダ装置までの距離R0・角度θ0を計測する第1測距器4a・第1測角器5aと、第2レーダ装置からの電波に基づき第2レーダ装置を検出するセミアクティブ検出器7aと、検出された第2レーダ装置までの距離・角度θ3を計測する第2測距器8a・第2測角器9aと、角度θ0および角度θ3に基づき算出した第1レーダ装置から見た目標の角度θ1、距離R0と第2測距器で計測された距離との距離差ΔRおよび距離R0を用いて目標までの距離R1を算出して目標位置を同定する目標位置同定器6を備えている。
(もっと読む)
パッシブRFIDタグの三次元位置を高精度に計測する方法
【課題】
パッシブRFIDタグの3次元位置を高精度で測定する。
【解決手段】
質問器からの電波AとRFIDタグの応答電波Bの到達時間差から求まる距離と電波Aと電波Bの位相差から求まる1波長内の距離との合成から、質問器からの距離を求め、3台の質問器を使用する事で、3次元位置を高精度で計測すると共に、RFIDタグの特性の違いによる誤差を、個体情報としてRFIDタグに書き込み、補正情報として使用する事で、より高精度な測定結果を得る。
(もっと読む)
マルチスタティックレーダ装置
【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
(もっと読む)
パルスレーダ装置
【課題】従来装置は、連続した同じ周波数の送信パルスに対する受信信号に対して、MTI処理によりクラッタ抑圧処理を行うため、相対速度0m/secの反射物からのクラッタを抑圧できるが、低速移動目標の受信信号も抑圧し、検出性能が劣化する。
【解決手段】パルス繰り返し周期毎に周波数が重複なく所定周波数で変化するパルス列が、繰り返される送信信号を目標方向へ送信し、目標および背景よりの反射信号から送信パルスと同じ周波数を用いて、生成された受信ビデオ信号を用いてMTI処理により背景からのクラッタの抑圧をクラッタ抑圧器で行い、合成帯域器でクラッタ抑圧器による全ての周波数の記送信パルスに対するMTI処理後の信号を用いて、合成帯域処理を行い、検波器で、合成帯域器からの出力の振幅値を求め、合成帯域処理による目標の高分解能測距結果を出力する。
(もっと読む)
水栓装置
【課題】使用者がセンサ部の検知範囲の近傍に物を誤って近づけた場合であっても、検知信号の周波数の変化の状況から、水栓装置を使用するための検知動作であることを的確に判定することができる水栓装置の提供。
【解決手段】吐水部30と、バルブ250と、センサ部100と、フィルタ部210と、判定部230と、判定部230からの信号に基づいてバルブ250の開閉を制御するバルブ制御部240とを備え、判定部230は、第1の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知した後、第1の周波数帯域よりも低い第2の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知し、その後に第1の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知した場合には、吐水部30からの吐水を行う判定をする水栓装置。
(もっと読む)
レーダ信号処理装置
【課題】 パルスドップラーレーダ装置において、ノイズによる誤警報確率を低く抑え、且つ、目標の検出確率確率を向上させた簡易な構成のレーダ信号処理装置を提供する。
【解決手段】 目標からの反射波を受信処理しレーダ装置からの距離毎に受信パルス信号の時系列を出力する受信部と、この距離毎の受信パルス信号の時系列に対しコヒーレント積分を施し距離毎の受信データの周波数系列を算出する信号処理部と、この距離毎の受信データの周波数系列に対し周波数成分ごとにCFAR処理を施し検出スレッショルド以上のS/N比を持つ受信データの周波数系列を検出する信号検出部と、この検出された受信データの周波数系列の周波数方向の相関性に基づき前記受信パルス信号の時系列が前記目標からの反射波によるものか雑音によるものかを判定するフィルタ相関部とを備えた。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
341 - 360 / 686
[ Back to top ]