
Fターム[5J070AD01]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358)
Fターム[5J070AD01]の下位に属するFターム
送受別体 (672)
Fターム[5J070AD01]に分類される特許
281 - 300 / 686
水栓装置
【課題】 水栓装置を利用する人が、差出す被洗浄物によっては水が出ない状態になる。
【解決手段】
ドップラーセンサと、吐水口と、前記吐水口から吐水された水を受水する受水部と、前記吐水口からの吐止水を切り替えるためのバルブと、前記バルブの駆動を制御するための制御部と、を備えた水栓装置であって、速度成分のうち低速度成分のみを検知するための低速抽出部をさらに備え、前記制御部は、被洗浄物が吐水口に到達する前に吐水を開始させるために、前記低速抽出部により低速度成分が検知されたときの、低速度成分以外の他の速度成分の検知情報に基づいてバルブの駆動を制御し、前記吐水口からの吐止水を切り替えることを特徴とする水栓装置を提供することである。
(もっと読む)
通信検出システムにおいて位相差およびドップラー効果に対する耐性を得るための方法および装置

マルチユーザ同時信号送信システムにおいて干渉を減少するための符号化および復号化方法および装置。本発明は、伝送媒体で信号を送受信する必要がある任意のシステムに適用されるときに、送受信される信号間の位相差による影響をなくすことができるようにし、かつ異なる送信機および受信機の速度差によって生じるドップラー効果をなくすことができるようにする符号化および復号化方法および装置を提供する。この方法は、現在のシステムよりも空間分解能が大きく、かつ計算力が低い検出システム(レーダー、ソーナー分光法、NDTなど)を設計できるようにすることによって、前記影響を低減できるようにする。同様に、データフローが受信される際の位相とは無関係に複数の直交データフローの同時通信を行う必要があるシステムでは、この方法はまた、受信機に到達する際の位相およびドップラー効果とは無関係に多元接続干渉を打ち消すことができるようにする。最後に、この方法は、信号の送信と受信を同時に行うことができるようにし、したがって、パルス圧縮を使用するシステムにおける測定間のブラインド時間をなくすことができるようにする。 (もっと読む)
吐水装置または吐水装置を備えた水栓装置
【課題】
被検知体の動きに応じた最適なタイミングで吐水を開始することができる吐水装置を提供する。
【解決手段】
吐水部と、
放射した電波の反射波によって被検知体の移動に関する情報を取得するセンサ部と、
前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、
を備え、
前記制御部は、前記被検知体が前記吐水部に到達する前に前記吐水を開始させるために、前記被検知体の前記吐水部への接近動作における速度が所定時間略一定であった後、速度変化を検知して、前記吐水を開始することを特徴とする吐水装置。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化を改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】1回目の第1の方向の誤差角の検出と2回目の第1の方向の誤差角の検出の間に、1回目の第2の方向の誤差角の検出と2回目の第2の方向の誤差角の検出を行い、1回目に検出した第1の方向の誤差角と2回目に検出した第1の方向の誤差角との相加平均を基準時間Tにおける第1の方向の誤差角とし、1回目に検出した第2の方向の誤差角と2回目に検出した第2の方向の誤差角との相加平均を基準時間Tにおける第2の方向の誤差角とする。
(もっと読む)
高周波センサ装置
【課題】アンテナ部側からの電気的影響を抑制することができる高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波の被検知体からの反射波を受信して前記受信波を検知する検波回路を有するアンテナ部と、前記アンテナ部の一方の主面と対向する第1の基板と、前記第1の基板の第1の主面上にある前記検波回路から出力された信号から前記被検知体の動きに関する判定を行う制御回路からなる制御部と、前記アンテナ部の前記制御部と対向する側の主面にある、前記アンテナ部から所定の周波数の送信波を発信させる空間を有する導電性のケースと、前記第1の基板の前記第1の主面と対向する第2の主面上であって、前記導電性のケースと対向する部分には、第1の接地電極が設けられ、前記第1の基板の前記第2の主面上であって、前記導電性のケースと対向する部分には、電子部品が設けられていない。
(もっと読む)
目標検出装置
【課題】長パルス信号波による受信障害を回避することができる目標検出装置を提供すること。
【解決手段】短パルス信号を送信し、目標における前記短パルス信号の反射により生じた第1の信号が受信された時点を前記目標との距離として識別する第1の識別手段と、前記短パルス信号よりパルス幅が長い長パルス信号を前記短パルス信号の後に送信し、前記目標における前記長パルス信号の反射により生じた第2の信号のパルス幅を圧縮することにより、前記目標を識別する第2の識別手段とを備えた目標検出装置において、前記第2の識別手段は、前記第1の信号が受信された時点が早いほど、前記長パルス信号の送信電力を小さな値に設定することによって構成される。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
距離測定装置
【課題】無線信号の送受信によって対象物までの距離を求める距離測定装置において、距離測定精度を向上させることを目的とする。
【解決手段】距離測定装置10は、距離測定対象の無線タグとの間の予備的な無線信号送受信により、その無線タグから送信される直接波信号およびマルチパス信号の各到来方向を推定する。そして、直接波信号の到来方向にアレイアンテナの指向性最大方向が向けられ、マルチパス信号の到来方向にアレイアンテナの指向性ヌル方向が向けられるようアレイアンテナの指向特性を制御する。距離測定装置10は、指向特性制御されたアレイアンテナを介して無線信号の送受信を行い、無線タグまでの距離を測定する。
(もっと読む)
物体までの距離及び物体の速度のうちの少なくとも一方を求める方法、並びに物体までの距離及び物体の速度のうちの少なくとも一方を求める装置
【課題】効率的に又は実効的に、マルチユーザのシナリオにおいて動作するFM−CWレーダを提供する。
【解決手段】物体が近づいてくるか、又は離れていくかの指示を判断すること、並びに、周波数が一定であるセグメント及び周波数が変化するセグメントから成るシーケンスを含む呼掛け信号を生成することを含む。物体が近づいてくることを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が減少し、物体が離れていくことを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が増加する。呼掛け信号を送信し、物体から反射される呼掛け信号の反射信号を検出する。次に、呼掛け信号及び呼掛け信号の反射信号の組み合わせを用いて、物体までの距離及び物体の速度のうちの少なくとも一方を求める。
(もっと読む)
ミラーおよび周辺監視装置
【課題】可視光を反射するといったミラー本来の機能を維持しつつ、レーダ装置が照射する電磁波の透過に影響を与えることのないミラーおよび周辺監視装置を提供する。
【解決手段】レーダ装置のアンテナの前方に設置されるミラーであり、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とし、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする。また、移動体に搭載され、当該移動体の外部に向けた検出範囲内の物体を検出するレーダ装置と、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とするミラーとを備え、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする周辺監視装置。
(もっと読む)
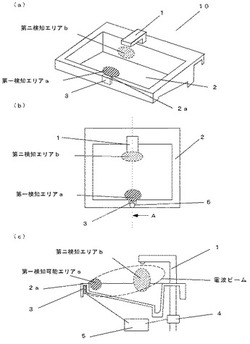
レーダ装置
【課題】小型化や車両部品形状の制約の条件を満足しながら外部からのノイズの影響を受けにくくするとともに水滴がレーダ内部に侵入しにくくなるレーダ装置を提供する。
【解決手段】内壁29がアンテナユニット1の収容時の平面アンテナ14の位置及び平面アンテナ14の最大回動角θに対応した位置にあるので、矢印Aで示すような外部からのノイズの影響を受けにくくするとともに、雨等の水滴がレーダ装置の内部に侵入しにくくなる。なお、内壁29の高さHは、Cで示すような電波の送受信に影響のない高さとなる。また、外壁28がアンテナユニット1の収容時の平面アンテナ14の位置より低い位置にあるので、小型化や車両部品形状の制約の条件を満足する。
(もっと読む)
位相補償のための集積回路、通信ユニット、および方法
通信ユニット(200)は、コントローラ(217)と、一連の増幅段(330,332,334)の各々と動作可能に接続された複数の遅延要素を有する無線周波数信号経路と、を備え、コントローラ(217)は、増幅段(330,332,334)の各々をそれぞれ活性化するように構成される。活性化させることに応じて、複数の遅延要素のうちのいくつかの遅延要素が選択的に無線周波数信号経路に挿入され又は無線周波数信号経路からバイパスされて、無線周波数信号経路を介して供給される信号に適用される位相シフトを調整する。 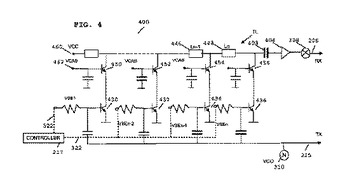 (もっと読む)
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
レーダ装置
【課題】2目標の方位角又は仰角が等しい場合でも測角が可能な複数目標の測角を行うレーダ装置を提供する。
【解決手段】目標で反射された反射波を受信する複数のアンテナ又は1つのアンテナを分割した複数の開口からなる複数の反射波受信部、複数の反射波受信部に入射された反射波のアナログ信号をそれぞれデジタル信号に変換する複数の受信機と、組み合わされた反射波受信部での位相中心が異なるように、デジタル信号を任意の組み合わせで合成する信号合成手段と、信号合成手段からの合成デジタルデータから、目標の組み合わされた反射波受信部に対する角度で決まる空間位相を求め、この空間位相から目標の前記組み合わされた反射波受信部に対する方位角及び仰角をそれぞれ求める測角処理手段と、測角処理手段の測角結果のうち、測角誤差の少ない測角結果を選択する測角値選択手段と、を備えた。
(もっと読む)
特徴的気象災害の強化警告
【課題】気象脅威の認識を強化し、航空機を危険な位置に置く可能性が最も高いかを航空機乗員に警告する、気象レーダ画像を航空機の乗員に提供する方法を提供する。
【解決手段】この航空機気象レーダシステム40は、表示デバイス44と、表示デバイスに結合されたプロセッサ42とを備える。プロセッサ42は、気象システムから反射された少なくとも1つの信号に対応する生の体積レーダデータを取得し、レーダデータに基づいて前記気象システムを複数の気象システムタイプのうちの第1のタイプとして計算的に分類し、気象システムを分類した後に前記レーダデータを画像処理し、前記画像処理は、前記気象システムを表し且つ前記第1の気象システムタイプに対応する画像を生じ、
画像を表示デバイス44上に表示する、ように構成されている。航空機気象レーダシステム。体積レーダデータは3次元バッファに記憶される。
(もっと読む)
レーダ装置
【課題】不要電波の送信を抑制するとともに、車両が停車時でも先行車両を検出する。
【解決手段】車両に搭載され所定の走査範囲をレーダ波で走査するレーダ装置は、前記車両の走行速度が第1の速度のときには、前記走査範囲内で第1の単位角度ごとにレーダ波を送信し、前記走行速度が前記第1の速度より遅い第2の速度のときには、前記走査範囲内で前記第1の単位角度より広い第2の単位角度ごとに前記レーダ波を送信する送信制御手段と、前記送信されたレーダ波の目標物体による反射波に基づいて前記目標物体を検出する目標物体検出手段とを有するので、レーダ装置全体としては不要なレーダ波の送信を抑制できるとともに、近距離の目標物体に対してはこれを検出するために必要なレーダ波の反射点を得ることができる。
(もっと読む)
対象位置情報取得管理システムおよび方法
【課題】 無線周波数識別(RFID)を利用して位置情報を位置タグに格納する、対象位置情報の取得管理システムおよび方法を提供する。
【解決手段】 タグ・プログラマは、全地球測地システム(GPS)のような外部測地システム、キーパッドのような手動入力部、またはその他のタグ・プログラマから位置情報を受信する。タグ・プログラマは、各タグに、受信した位置情報をプログラムする。タグ・プログラマおよび位置タグの双方は、可搬型でも固定型でも可能である。実現例には、可搬タグ・プログラマと、対象位置案内用固定位置タグと、収集サンプル・ラベル付け用の可搬タグ・プログラマとを含む場合がある。他の実現例では、固定タグ・プログラマと、対象ルート記録用可搬位置タグとを含む。位置タグは、対象のルーティングのために、装着した対象の目的地アドレスのような、その他の関連情報を収容することができる。
(もっと読む)
鉄筋コンクリート体の健全性の非破壊評価方法、及びその装置
【課題】コンクリート体のひび割れや脆弱化等により損傷を受けたコンクリート体の健全性非破壊で効果的に評価する方法を提供する。
【解決手段】上記課題は、鉄筋コンクリート体の健全性を非破壊で評価するにあたり、電磁波レーダーkにより鉄筋コンクリート体g内の鉄筋hの探査を、所定の探査間隔で、コンクリート体gの評価対象領域の全体にわたり行うことによって、少なくとも鉄筋hの深さ位置を取得し、取得した深さ位置に乱れがある探査箇所範囲をコンクリートの不健全箇所として評価する、ことにより解決される。
(もっと読む)
電子式識別システム
【課題】復元電圧を高め動作範囲の拡大を図った電子式識別システム用トランスポンダを提供する。
【解決手段】このトランスポンダ20は、高入力インピーダンスに整合したアンテナ22にその入力が直接接続され、高い入力インピーダンス(>400Ω)を呈することを特徴とする。このトランスポンダは、質問信号から復元されるコンデンサC2上の電圧を高めることによって、システムの動作範囲を拡大することを目的とする。トランスポンダの変調器30は、80%未満、好ましくは約30%の変調深さで質問信号の後方散乱変調を行うように構成されている。これによっても、システムの動作範囲拡大が得られる。
(もっと読む)
方位検出装置
【課題】少ないアンテナ数で多くのターゲットを同時に且つ高い方位分解能で検出できる方位検出装置を提供する。
【解決手段】送信ビーム及び受信ビームの指向性パターンがいずれも一つのヌルを有し、且つ、送信ヌル方向及び受信ヌル方向を方位検知範囲内で順次変化させながら探査波の送受信を行って受信電力を測定し(S110〜S150)、その受信電力が極小となる送信ヌル方向及び受信ヌル方向の組合せを抽出し、その抽出した送信ヌル方向及び受信ヌル方向のそれぞれを別個の物標が存在する方位として検出する(S160〜S170)。このように、送信ビーム及び受信ビームの指向性パターンにおける送信ヌル方向及び受信ヌル方向を独立に制御しているため、送信ヌル数と受信ヌル数とを合計した数の物標を同時に且つ高い方位分解能にて検出することができる。
(もっと読む)
281 - 300 / 686
[ Back to top ]