
Fターム[5J070AD01]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358)
Fターム[5J070AD01]の下位に属するFターム
送受別体 (672)
Fターム[5J070AD01]に分類される特許
321 - 340 / 686
移動体検出装置および移動体検出方法
【課題】振動センサを内蔵し、安価な移動体検出装置を提供すること。
【解決手段】本発明は、振動を増幅し、波動を反射する振動部22と、波動を出射し、振動部22で反射した波動の反射波を検出することにより振動を検出するとともに、移動体で反射した波動の反射波を検出することにより移動体を検出する検出部と、を具備する移動体検出装置である。本発明によれば、振動センサを新たに設置することが不要となる。また、振動センサに配線することが不要となる。よって、設置場所の削減、コスト削減が可能となる。
(もっと読む)
傾き調整制御方法及びその制御装置

【課題】精度よく調整ができる傾き調整制御方法及びその制御装置を提供すること。
【解決手段】基準ボルト21、垂直調整ボルト22、水平調整ボルト23でブラケット40に取付けたミリ波レーダ装置10の傾きを調整する際に、基準ボルト21、垂直調整ボルト22、水平調整ボルト23の頭部231に対応する形状の凹部661を有するビット66を備えたネジ締め装置60にて基準ボルト21、垂直調整ボルト22、水平調整ボルト23を回すことによって調整する傾き調整制御方法であって、ビット66の凹部661に頭部231を配置する着座工程と、着座工程後にミリ波レーダ装置10及びブラケット40に対して、ビット66から荷重が印加されない位置にビット66を位置調整する位置調整工程とを備える。
(もっと読む)
レーダ装置
【課題】ヒット数が限られている中で、複数のCPIを効果的に設定することができるレーダ装置。
【解決手段】等しい第1時間間隔t1を持つN個(N>2で整数)の送信パルスからなる第1送信パルス列に対して、2個の送信パルスを選んだときにt1〜(N−1)*t1の全ての時間間隔を含むように第1送信パルス列から送信パルスを間引きした第1送信パルス群と、第1送信パルス列とは異なる第2時間間隔t2を持つM個(M>2で整数)の送信パルスからなる第2送信パルス列に対して、2個の送信パルスを選んだときにt2〜(M−1)*t2の全ての時間間隔を含むように第2送信パルス列から送信パルスを間引きした第2送信パルス群とを生成する送信パルス群生成手段61と、同一方向に対して第1送信パルス群と前記第2送信パルス群とが一部又は全部が時間的に重畳するように送信する送信手段1とを備える。
(もっと読む)
無線タグ距離測定装置
【課題】無線タグ距離測定システムにおいて、複数の無線タグから送信される応答信号の干渉を回避すること、および距離測定精度を向上させることを目的とする。
【解決手段】無線タグ距離測定装置10は、距離測定対象の無線タグの固有割り当てPN符号に応じて値が変化するPN信号を生成し、さらにPN信号に基準正弦波信号を乗じた正弦波PN信号を生成する。そして、正弦波PN信号を無線信号に変換した拡散パルス変調信号を送信する。無線タグ距離測定装置10は、無線タグによって拡散パルス変調信号に対して時間圧縮処理が施された圧縮パルス変調信号を受信する。無線タグ距離測定装置10は、正弦波PN信号を生成する元となった基準正弦波信号と、受信した圧縮パルス変調信号に含まれる基準正弦波信号との位相差に基づいて、無線タグまでの距離を算出する
(もっと読む)
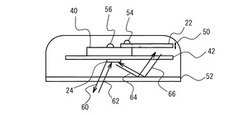
レーダ装置及び光軸調整装置
【課題】光軸調整を正確に行う。
【解決手段】レーダ装置1は、平板状のプリント基板11と、予め設定された第1周波数の第1電磁波を送受信するべく、プリント基板11上に形成されたアンテナ111と、プリント基板11上に形成され、レーダ装置1の光軸調整において外部から照射される第2電磁波を反射可能に構成されたミラー113と、を備える。
(もっと読む)
検出装置および鉄道車両
【課題】移動体の位置情報を低コストで検出することができる技術を提供する。
【解決手段】鉄道やエレベータかご等の移動体の位置情報を、電磁波の反射強度変化を利用して検出する。第1電波を放射する電波送信機SNDと、放射された第1電波からそれぞれの絶対位置において固有の反射強度およびその時間変化のパターンを生成する位置マーカーMKと、位置マーカーMKにより反射された第2電波を受信し、位置情報を取り出すための信号形式に変換し出力する電波受信機RCVと、電波受信機RCVの出力から位置を求めるマーカー認識装置LCCから構成される。これにより、設備コスト・メンテナンスコストの削減、1センチメートル以下の分解能での高精度な位置特定、車輪の空転・滑走に影響を受けない高信頼な位置特定が可能となる。
(もっと読む)
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
(もっと読む)
車両探索装置および車両探索方法
【課題】装置構成を簡略化し、かつ、発信源の方向の検知精度を向上させる。
【解決手段】車両探索装置10は、トリガー信号を発信可能な携帯端末11と、トリガー信号に対する応答信号を所定時間に亘って所定パターンで発信する車載装置12とを備え、携帯端末11は、応答信号の所定反射体(操作者の人体)での反射波を所定相対位置(操作者の所定正面位置)で受信するアンテナ21aと、反射波の受信強度および受信パターンを検出する受信強度検出部23と、応答信号の車両側識別情報と所定の端末側識別情報とを比較する識別情報比較部25と、車両側識別情報が端末側識別情報と一致した場合に、所定反射体の異なる配置方向毎での受信強度を操作者に報知する報知制御部28とを備える。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、マルチパス環境下で安定した追尾を行うため、誘導信号に重畳するノイズ成分を、ハイパスフィルター、ピークホールド回路等による補正を実施していたが、シンチレーション等により目標のS/Nが劣化した場合、マルチパスによる虚像からの反射波が支配的となり、虚像に誤ロック及び誤追尾するという問題があった。
【解決手段】 マルチパス判定部を備え、アンテナを振りながら目標と虚像の両方を受信し、アンテナ角度とロックオンフラグをマルチパス判定部に入力する。マルチパス判定部では、下方向から受信する信号を虚像と判定し、キャンセルする。これにより、マルチパスによる虚像に誤ロックする問題点を解消する。
(もっと読む)
電波距離計の温度補償方法
【課題】簡単な構成で電波距離計の温度補償を行う。
【解決手段】送信回路1と受信回路3との間の結合によって、送信回路1からアンテナ4へと向かわずに送信回路3へと漏れる送信漏れ信号は、温度変化の影響を受けて、その送信漏れ信号の位置及び強度が変化する。また、受信信号も温度変化の影響を受ける。従って、この送信漏れ信号の位置または強度の基準値をメモリ9に予め記録しておき、実測された送信漏れ信号の位置または強度と比較し、この比較結果に基づき補正を行う。
(もっと読む)
FM−CWレーダ装置
【課題】FM−CWレーダ装置において、レーダの受信信号に混入したインパルス状の干渉波をビート信号から除去する。
【解決手段】ビート信号を連続する3以上の被調整・注目・被調整スイープデータ列とし、被調整スイープデータ列の振幅と位相を前記注目スイープデータ列の振幅と位相に等しくなるようにそれぞれ調整して調整済スイープデータ列を得、調整済・注目・調整済スイープデータ列の対応するデータの中央値を出力用スイープデータ列とする。
(もっと読む)
波数推定装置
【課題】従来の波数推定装置では、目標の固有値と雑音の固有値との差が小さくなる低SNRの場合、誤った波数推定を行う問題があった。
【解決手段】目標からの反射信号を、アンテナのビーム指向方向に高利得を得るようビーム合成して、ビーム合成信号をパルス間積分し、パルス間積分信号から目標信号が検出された場合、目標からの反射信号の相関行列を相関行列算出手段で算出し、固有値・固有ベクトル算出手段で固有値・固有ベクトルを算出し、この固有ベクトルにより固有ビーム形成手段でビーム形成して、ビーム形成出力に対しコヒーレント積分手段がコヒーレント積分を行い、コヒーレント積分値を所定の基準で抽出して、波数推定手段で波数を推定する。
(もっと読む)
レーダ装置
【課題】FMCWレーダを初めとするCWレーダ方式を用いるレーダ装置において、干渉波の発生を回避し、制約された周波数変調帯域内に同時に多くのレーダ装置を収容可能とする。
【解決手段】周波数変調を伴う基準連続波に基づく送信波を空間に放射し、外部目標に反射されたこの送信波を受信して受信信号を取得するとともに、取得した受信信号と上記基準連続波からビート信号を求め、求めたビート信号から上記外部目標の距離及び速度を算出するレーダ装置1において、上記基準連続波を上記レーダ装置に特有の間隔でパルス化してパルス送信信号を生成するパルス生成手段13と、上記パルス送信信号を上記送信波として空間に放射するアンテナ16と、干渉波の発生を検出する干渉波モニタ19とを備え、パルス生成手段13は、干渉波モニタ19が検出した干渉波のパルス間隔と異なる間隔を上記特有の間隔に選択する。
(もっと読む)
複合多勾配FMチャープ波形を用いた自動車レーダー
対象物体の距離及び速度を求めるのに用いられるマイクロ波センサーの搬送波周波数を変調するのに利用される波形の生成及び処理のためのシステム及び方法が開示される。本システム及び本方法は、結果として高レベルの干渉を有する環境における性能を改善する。 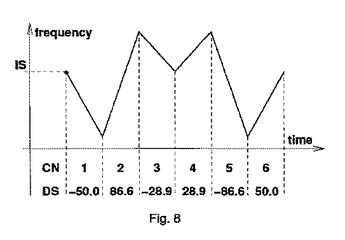 (もっと読む)
(もっと読む)
速度測定装置
【課題】 小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる速度測定装置を提供すること
【解決手段】 ドップラー信号を出力するドップラーセンサ11と、ドップラーセンサによって出力されたドップラー信号を基準と比較して二値化するコンパレータ12と、コンパレータの出力に基づいてヘッドスピードを算出する第一マイクロコントローラ14と、ドップラー信号に基づきFFTによりボールスピードを求める第二マイクロコントローラ17と、を備える。さらに、第一マイクロコントローラは、ゴルフクラブのスイングの有無を判別する機能を備え、スイングがあったと判別された場合に、ドップラー信号の蓄積を開始し、FFT処理を行うようにした。
(もっと読む)
誘導装置
【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
RFID用ノイズ抑圧装置およびRFIDリーダ装置
【課題】RFIDリーダ装置の読み取り精度を向上させることを目的とする。
【解決手段】RFIDリーダ装置4のノイズ抑圧装置27は、送信波を入力して減衰させる減衰回路28と、減衰回路28からの出力信号の位相を0度から360度に所定の位相を加えて移相可能な移相回路29と、RFIDタグ3から受信した応答信号と移相回路29の出力信号とを合成する合成回路30と、減衰回路28の出力が送信波の漏れ波により直接受信される漏れ信号の出力とほぼ同じ振幅になるように減衰回路28の減衰量を制御するとともに漏れ信号の位相とほぼ逆位相となるように移相回路29の移相量を0度から360度に所定の位相を加えて制御する制御回路31とを備えている。
(もっと読む)
レーダ情報伝送システム及びそのためのレーダ装置
【課題】複数のレーダ装置の間でのレーダ情報の伝送システムにおいて、情報伝送のための通信装置を設けることなく、レーダ情報を伝送し、レーダ装置間で情報を共有すること。
【解決手段】第1パルスレーダ装置Aからパルス電波に物標情報に基づく通信データを重畳して形成された通信データ重畳電波を送信し、第2パルスレーダ装置Bで通信データ重畳電波に含まれる物標情報を取得することにより、情報伝送のための通信装置を設けることなく、レーダ装置間で情報を共有する。
(もっと読む)
レーダ装置
【課題】加速度目標を除去せず、JEMを除去し、目標検出性能の向上したレーダ装置を得る。
【解決手段】送信信号を放射する送信手段2と、目標で反射した受信信号を受信する受信手段4と、受信信号から距離−速度マップを作成する距離−速度マップ作成手段206と、距離−速度マップに対し、目標候補、目標候補との相対距離および相対速度を算出する目標候補検出手段207と、所定時間経過前の過去時刻における距離−速度推定値の範囲を算出する距離−速度推定値算出手段208と、過去時刻に検出された目標候補が、過去時刻における距離−速度推定値の範囲内に存在する場合に、目標候補を目標と判定する目標判定手段209と、目標と判定されなかった目標候補からJEMを判定し、JEMと判定した目標候補および目標と判定された目標候補を除いた第2の目標候補を算出する第2の目標判定手段210とを備える。
(もっと読む)
車両周辺監視装置
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
321 - 340 / 686
[ Back to top ]