
Fターム[5J070AH31]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | デジタル処理を行なうもの (1,302)
Fターム[5J070AH31]に分類される特許
361 - 380 / 1,302
車載レーダ装置
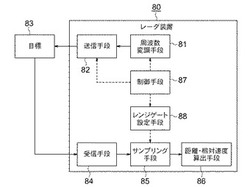
【課題】近距離の目標を検知でき、演算量を増やすことなく、遠距離の目標も検知できる車載レーダ装置を得る。
【解決手段】送信信号の周波数を三角波により周波数変調する周波数変調手段81と、周波数変調された送信信号をパルス化して送信パルスとして目標83に送信する送信手段82と、反射した信号を受信パルスとして受信し、周波数変調された送信信号の一部と受信パルスとの周波数差よりビート信号を生成する受信手段84と、送信パルスの送信タイミングを基にして、受信パルスのサンプリングタイミングを定めるレンジゲートを設定するレンジゲート設定手段88と、設定されたレンジゲート毎に、ビート信号をサンプリングするサンプリング手段85と、サンプリングされたビート信号に基づいて目標83までの距離と相対速度を算出する距離・相対速度算出手段86と、自車速に応じて送信パルス幅とレンジゲート幅を変更する制御手段87とを設けた。
(もっと読む)
超広帯域無線通信測距装置、測距方法、時間間隔検出装置

【課題】高速なサンプリング信号を用いることなく、測距の距離分解能を向上させる。
【解決手段】受信系統において、スペクトラム拡散変調信号が空間に送信された時刻である第1時刻(Tr)を得て、スペクトラム拡散変調信号の同期ポイントから第2時刻(Ds)を得て、第1時刻においてクリアされ、クロック信号でカウントアップされ、第2時刻においてカウントアップが停止されるメインカウンタ163と、少なくとも第2時刻でラッチしてk個の1ビットの信号を得る、クロック位相器164からクロックが供給されるサブカウンタ162と、を備える、超広帯域無線通信測距装置とした。
(もっと読む)
車載用パルスレーダ
【課題】簡易な構成で遅延時間を与えることで受信信号へのノイズ信号の混入を時間的に分離して高精度で対象物情報の検出が可能な車載用パルスレーダを提供する。
【解決手段】周波数変換器152でダウンコンバートされたベースバンド信号は、遅延回路153を通過したのち、基板間コネクタ103を介して信号処理部102に出力される。また、制御信号は、制御信号発生部162から基板間コネクタ103を介してスイッチ回路151に出力される。遅延回路153は、ベースバンド信号に所定の遅延時間を与えることで、制御信号が基板間コネクタ103を通過してからベースバンド信号が基板間コネクタ103を通過するまでの時間差を大きくしている。これにより、ベースバンド信号は、制御信号からの干渉を受けることがなくなる。
(もっと読む)
温度異常検知装置およびミリ波レーダモジュール
【課題】高温および低温での温度検知精度を向上させること。
【解決手段】通常温度モニタ部11aにてモニタされた温度が低温の場合、低温異常検知モードM1で動作し、アナログ入力端子A/D2に入力された出力値VLに基づいて低温異常を検知し、通常温度モニタ部11aにてモニタされた温度が高温の場合、高温異常検知モードM3で動作し、アナログ入力端子A/D3に入力された出力値VHに基づいて高温異常を検知する。
(もっと読む)
レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム
【課題】パルスレーダで目標の速度を正確に検出しようとする場合、複数のPRFのパルス信号から位相回転量を算出し、PRFごとの位相回転量の組み合わせから速度検出を行う。このような関連技術のレーダでは、PRFごとにドップラ周波数分解能が異なるため、何度も折り返るような高速目標の場合は速度検出精度の差に依存する誤差が無視できなくなり、速度の検出を誤ってしまうという課題がある。
【解決手段】本発明は、前記課題を解決するために、利用する複数のPRF間で等間隔なドップラ周波数分解能を得ることのできるようPRFを制御するPRF制御器11と、PRFを等間隔なドップラ周波数分解能ごとの受信信号に分離する等間隔ドップラ周波数分離器16とを備えることにより、誤差のない速度検出を行うことを可能とする。
(もっと読む)
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】突発的かつ局地的な気象現象を高精度に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角と方位角とを駆動する駆動ユニット12と、複数の観測モードにしたがって前記アンテナユニット11及び前記駆動ユニット12により観測範囲と観測仰角とを調整する空中線調整装置5と、前記反射波の受信信号に基づいて前記観測モードを設定する監視制御装置4とを具備する。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
追尾装置、追尾方法、及びコンピュータプログラム
【課題】飛翔体のトランスポンダーから送信されてきた応答信号を受信し、その電波強度を基に、アンテナ角を飛翔体に追尾させる追尾装置で、サンプリングレートを高速化させることなく、高精度追尾が可能にする。
【解決手段】制御装置21の座標演算器22で現時刻の飛翔体の位置座標を算出し、位置推定器23で次時刻の飛翔体の位置座標を推定し、角度算出器24で次時刻のアンテナの角度の推定値を算出している。そして、推定された次時刻でのアンテナの角度を目標値として、アンテナ31の向きを制御している。このように、本発明の第1の実施形態では、次時刻でのアンテナの角度の推定値を目標値として、アンテナ31の向きを制御しているため、サンプリングレートを高速化させることなく、高精度追尾が可能になる。
(もっと読む)
送受信装置およびイメージング装置
【課題】高精度なイメージ検出を可能にする送受信装置およびそれを使用するイメージング装置の実現。
【解決手段】周波数可変の発振信号を発生する発振器21と、発振信号から高調波を生成する高調波発生器23と、高調波から第1高周波信号を取り出す第1フィルタ24と、高調波から第2高周波信号を取り出す第2フィルタ25と、受信信号を第2高周波信号でダウンコンバートするダウンコンバート用ミキサ26と、発振信号から互いに直交する第1および第2中間周波数信号を生成するハイブリッドカプラ27と、ダウンコンバート用ミキサ26の出力と第1中間周波数信号をミキシングして第1ベースバンド信号を取り出す第1ミキサ28と、ダウンコンバート用ミキサ26の出力と第2中間周波数信号をミキシングして第2ベースバンド信号を取り出す第2ミキサ29と、を備える送受信装置。
(もっと読む)
FMCW信号生成回路及びレーダー装置
【課題】 位相雑音を抑制できるFMCW信号生成回路及びレーダー装置を提供する。
【解決手段】 制御信号に応じた発振周波数を含むFMCW信号を生成する電圧制御発振器と、前記FMCW信号の位相情報を検出し、検出信号を生成するデジタル位相検出器と、前記検出信号を1回微分して前記発振周波数の情報を含む微分信号を生成する微分器と、前記微分信号と参照信号とを比較し誤差信号を生成する比較器と、前記誤差信号の高周波成分を抑制し、フィルタリング信号を生成するローパスフィルタと、前記フィルタリング信号を増幅し増幅信号を生成する増幅器と、前記増幅信号をアナログに変換し、アナログ信号を生成するD/A変換器と、前記アナログ信号を積分し、前記制御信号を生成する積分器と、を備えることを特徴とするFMCW信号生成回路を提供する。
(もっと読む)
パルスレーダ装置、パルスレーダ装置の目標物検出方法及び検出処理プログラム
【課題】1方向のビーム走査に要する時間を短くすると共に、2次トリップエコーとの判別を誤ることなく確実に1次エコーを検出することができるパルスレーダ装置を提供する。
【解決手段】パルス位相設定器11によって基準変化量φ1でNパルス分の初期位相を発生させ、送信パルス発生器12によってN個の送信パルス列を発生・送信する。目標で反射したNパルス分の受信信号を1組として目標信号を検出する。同様にして基準変化量φ2ついても目標信号を検出する。初期位相と逆の位相で受信信号を補正し、補正後の受信信号の位相回転量を比較して2次トリップエコーを除去すると共に1次エコーを検出しその目標データを出力する。
(もっと読む)
マイクロ波位置検知システムおよびマイクロ波を使用して位置を検知する方法
【課題】ターボ機械内の多数の対象部品の位置をコスト効率よく監視するマイクロ波位置検知システムを提供する。
【解決手段】マイクロ波位置検知システムは、それぞれが複数の位置の間を移動する複数の対象部品を備える。マイクロ波発生器は、マイクロ波周波数信号を発生させる。分割器は、マイクロ波周波数信号を受け取り、複数の位置検知信号に分割する。分割された位置検知信号は、対象部品のそれぞれの位置を求めるために、複数の対象部品に送られる。また、位置検知信号の各々を校正することもできる。一実施例において、第1および第2の周波が共通の導波路を通って伝送する。第1の周波は、校正信号を生成するために対象部品に到達する前に反射される。対象部品の位置を検知するのに使用される第2の信号は、第1の信号を使用して校正される。
(もっと読む)
レーダ装置
【課題】
レーダ主画面上の指定目標物に対する高分解能レーダ画像を随時確認することを可能にする。
【解決手段】
送信波を放射する送信部と、送信波を放射する送信部と、複数個のアンテナおよび受信機から構成され、前述送信波が目標物から反射した到来波を受信する受信部と、それぞれの受信機に対応してA/Dサンプリングを行うAD部と、画像処理によって自動的に追尾機能を実行し、到来方向推定の実施領域を決定する特定領域決定部と、到来方向推定を行うための評価関数(例えば、MUSICスペクトラム)を計算する到来方向推定部と、全方位のレーダ画像を表示する主画面表示部と、自動的に決定された特定領域の高分解能処理結果を表示する副画面表示部を具備する。
(もっと読む)
障害物検知装置
【課題】光、電波、超音波等の信号波を用いる障害物検知装置において、低コストかつ簡単な構成により、障害物までの距離を精度良く測定可能とする。
【解決手段】障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって搬送波を振幅変調して信号波を生成し、その信号波を空間に送信する送信部12と、信号波の反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号とから中間周波信号を出力する第1のミキシング部15と、受信信号と第2の周波数を持つ信号とから中間周波信号を出力する第2のミキシング部16と、送信信号と受信信号のそれぞれから求めた2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部17と、を備える。2つの中間周波を用いるので低コスト構成で距離を精度良く求められる。
(もっと読む)
トイレ装置
【課題】ドップラーセンサーを用いて対象物の検知を行う際に、より簡素な構成で且つ確実に誤検知を防止できるトイレ装置を提供すること。
【解決手段】このトイレ装置としての小便器洗浄装置は、受信部12が送信期間以外においても受信動作を行ってドップラー信号を対象物検知部24に出力する干渉検知処理と、その出力されたドップラー信号が、他のトイレ装置から送信された電波による影響を受けた信号であると判断した場合には、その影響を受けた信号と干渉しないタイミングとなるように、電波送信タイミングを調整する調整信号をドップラーセンサー部DSに出力する干渉調整処理と、その調整信号で調整された電波送信タイミングに送信期間をシフトさせるシフト処理と、を実行し、検知動作は、このシフトされた送信期間を基準とし動作間隔期間をおいて継続的に複数回実行される。
(もっと読む)
レーダ搬送波監視装置
【課題】装置の規模を小型軽量化しつつ、レーダ信号に対する監視データの信頼性を確保し向上させたレーダ搬送波監視装置を得る。
【解決手段】進行波及び反射波のレベル測定に際し、給電線路の電気長に基づいた測定時間幅を設け、その時間幅の中でのピーク値を取得することにより、特に反射波等、発生タイミングの一定しない場合においてもそのピークレベルを確実に取得する。また、進行波電力、及び反射波電力の監視に加え、レーダ搬送波の監視に必要な、周波数及びパルス情報等の機能についても、1つのFPGA内に単一モジュール化して構成する。
(もっと読む)
画像レーダ装置
【課題】従来、観測目標と一致する候補目標の3次元形状データや観測目標種類が不明の場合、クロスレンジ軸ベクトルの推定ができず、また、クロスレンジ軸ベクトルが一意に定まらず複数種類得られてしまう。
【解決手段】受信高周波信号の目標上の反射強度分布に関するレンジ方向と、クロスレンジ方向を共に高分解能化処理して生成されたレーダ画像上の主軸と高さ軸又は/及び横軸のレーダ画像における夫々の軸の傾きを全軸傾斜計測手段で算出し、画像レーダ装置から目標に向かう方向のレンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルを全軸方向推定手段で得て、レンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルと、レーダ画像上の主軸と高さ軸又は/及び横軸の傾きからクロスレンジ軸ベクトルを推定する。
(もっと読む)
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
(もっと読む)
サンプリングパルス発生装置
【課題】高振幅でパルス幅の小さいサンプリングパルスを安定的に生成しながら不要スペクトラムの輻射を抑制し、不要スペクトラムの削減に要するコスト上昇を回避すると共に、サンプリングタイミングの時間走査を容易とする。
【解決手段】送信パルス生成部10、サンプリングパルス生成部20で、直交周波数多重分割変調と等価な信号処理により、送信に必要なインパルス状の短パルス、或いは受信波のサンプリングに必要なインパルス状の短パルスを高速スイッチング素子を用いることなく生成する。これにより、高振幅でパルス幅の小さいサンプリングパルスを安定的に生成しながら不要スペクトラムの輻射を抑制し、不要スペクトラムの削減に要するコスト上昇を回避すると共に、サンプリングタイミングの時間走査を容易とすることができる。
(もっと読む)
361 - 380 / 1,302
[ Back to top ]