
Fターム[5J070AK01]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 探知範囲の拡大 (264)
Fターム[5J070AK01]に分類される特許
61 - 80 / 264
後方乱気流検出装置
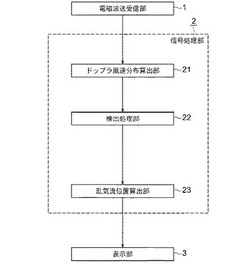
【課題】仰角が高い場合も後方乱気流を検出できる後方乱気流検出装置を得る。
【解決手段】航空機の飛行方向に直交する方向に大気中へ光パルスを発射し、その大気からの反射光を一空間断面の信号として受信する電磁波送受信部1と、受信信号から空間断面のドップラ風速分布を算出し、ドップラ風速分布から空間断面の後方乱気流の位置を算出する信号処理部2と、空間断面の後方乱気流の位置を表示する表示部3とを備え、信号処理部2は、受信信号に基づき、処理単位毎に風速値を算出して空間断面のドップラ風速分布を算出するドップラ風速分布算出部21と、算出されたドップラ風速分布と、パラメータにより算出されたドップラ風速分布モデルとの相互相関処理から、後方乱気流を検出する検出処理部22と、相互相関処理の相関値が所定の値である空間断面の所定の位置から、空間断面の後方乱気流の位置を算出する乱気流位置算出部23とを有する。
(もっと読む)
障害物検出装置

【課題】他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供する。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
(もっと読む)
レーダ装置及び信号処理方法
【課題】連続する送信パルス信号の変調方式を互いに相関性の低い変調方式に切り替えることで1次エコー及び2次エコーの両方を用いて目標を観測する場合であっても、ブランク領域のない観測結果を取得する。
【解決手段】レーダ装置は、送信パルス信号の変調方式を一パルス毎に互いに相関性の低い変調方式に切り替えて送信すると共に、その送信パルス信号のPRFを所定のタイミングで他のPRFへ切り替えることで目標を観測する。そして、観測結果におけるブランク領域を他のPRFにより取得された観測結果に基づいて補間する。これにより、レーダ装置は、観測結果におけるブランク領域を解消することが可能となる。
(もっと読む)
測位方法およびシステム
【課題】リーダをタグに近接させる動作が不要であり、分散配置される多数の無線タグを他のシステムと未接続の自律状態とできる測位方法およびシステムを提供する。
【解決手段】携帯無線端末2において、測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、測位要求を受信した各無線タグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から各測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各無線タグ1の設置位置Pを抽出する。測位部25は、各無線タグ1の応答時間ΔTおよび各無線タグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
(もっと読む)
パルスドップラレーダ装置
【課題】使用形態の変更を自動的に判定して使用条件を切り替えるパルスドップラレーダ装置を提供する。
【解決手段】判定・制御部110は、使用形態判定手段111と、パルス幅選択手段112と、帯域制限幅選択手段113とを有しており、使用形態判定手段111が自車両の所定の制御装置からギア状態の信号を入力して使用形態の判定を行っている。使用形態判定手段111の判定結果に基づいて、パルス幅選択手段112および帯域制限幅選択手段113がそれぞれ広帯域インパルス生成部120および帯域幅制限部150を制御している。
(もっと読む)
レーダ装置用アンテナ
【課題】誘電体の放射基板に表面波の発生を抑制して一体化構造で形成され、広角度に測角可能なレーダ装置用アンテナを提供する。
【解決手段】レーダ装置用アンテナ400は、放射基板420に4×2の配列で合計8個のアンテナユニット410のパターンが形成されている。放射基板420の裏面には第1の地板401が形成され、さらに第1の地板401を挟んで線路基板405が設けられている。放射部402aは放射基板420上にパターンで形成されており、給電部402bはスルーホールで形成されて伝送線路404に接続されている。第2の地板403も、放射基板420上のパターンで形成されたランド403aとスルーホール403bで形成されている。
(もっと読む)
降雨レーダ合成処理装置
【課題】精度を高めることができる降雨レーダ合成処理装置を提供する。
【解決手段】降雨レーダ合成処理装置1は、Xバンドレーダ51の測定領域53を複数のセクタ方向と複数のレンジ方向とに分割した各メッシュMEs,rの平均受信電力Prを算出する初期設定部2と、平均受信電力Prに基づいて、減衰補正項を算出する減衰補正項算出部4と、各セクタにおいて、減衰補正項KIRが基準値KIRstよりも大きいメッシュMEs,rのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定するとともに、平均受信電力Prが閾値ThPrよりも小さいメッシュのうち、Xバンドレーダ51に最も近いメッシュのレンジ番号rを減衰開始レンジ番号rstと決定する複合減衰判定処理部7と、減衰開始レンジ番号rstに基づいて、降雨データを合成する合成処理部10とを備えている。
(もっと読む)
障害物検知システム及び車両装置
【課題】障害物に接触することなく車両本体と開閉ドアとの間の障害物を確実に検知すること。
【解決手段】開閉ドア側の第1の位置にレーダー装置20又はトランスポンダTの一方が設けられ、車両本体側の第2の位置にトランスポンダT又はレーダー装置20の他方が設けられている。送信回路21は所定の周波数の送信信号を無線送信し、トランスポンダTの送受信回路は無線送信された送信信号を受けて、同一周波数かつ同一位相の返信信号を送り返す。受信回路21は返信信号を受信し、測定部22は送信信号及び返信信号の位相情報から距離情報を測定する。メモリ23には開閉ドアが全開状態でのトランスポンダTとレーダー装置20との距離に対応した距離情報が格納され、障害物検知部24は、測定部22が測定した距離情報とメモリ23に格納された距離情報とを比較して、これら距離情報が不一致の場合には障害物有りと判定する。
(もっと読む)
車載レーダ装置
【課題】 ミリ波レーダの送受信波を円錐形状の反射鏡で反射し、簡単で安価な構成により、車両周辺の物体を広角に検知できる車載レーダ装置を提供する。
【解決手段】 リアコンビネーションランプ2の灯室7に車載レーダ装置1を設置する。車載レーダ装置1は、車両後方の物体を検知するミリ波レーダ12と、ミリ波レーダ12の送受信波を反射する反射鏡13とを備えている。ミリ波レーダ12をアンテナ部15が上向きとなるように灯室7の下部に配置し、反射鏡13を頂点が下向きとなるように灯室7の上部に配置する。反射鏡13は高さよりも半径が長い半切円錐体であり、半切円錐体の側面が反射面18となっている。反射面18は半切円錐体の母線を底面に向けて湾曲させた凹曲面であり、ミリ波レーダ12の送受信波をアンテナ部15に設定された放射角の約2倍の範囲で水平方向に反射し、垂直方向に約25°の範囲で反射する。
(もっと読む)
障害物監視装置
【課題】距離成分から障害物の位置を検出すると同時に、速度成分から障害物が固定物か侵入物かを判別でき、高性能で且つ経済的に製品化しやすい障害物監視装置を得る。
【解決手段】鉄道線路などの監視対象の両側に沿わせて1対のLCX1、2を布設し、一方のLCX1から他方のLCX2にFMCW方式の送信電波を放射して障害物Dを検出する。信号処理器14は、ビート周波数信号から求めた距離成分および速度成分を解析することにより、距離成分から障害物Dの位置を検出すると同時に、速度成分から障害物Dが固定物か侵入物かを判別する。
(もっと読む)
アクティブフェーズドアレイレーダ
【課題】空中線モジュールにおける出力の制約を解消してより高い電力の出力を可能にすることで、状況に応じてより有効なアンテナビームを形成できるアクティブフェーズドアレイレーダを提供する。
【解決手段】空中線モジュール20において送信用可変減衰器6aを電力増幅器7の入力側に配置することで出力の制約を解消しより高い電力の出力を可能にし、制御装置8が、各空中線モジュール20の電力増幅器7、可変減衰器6a,6bおよび回路切換え機構2〜4を制御してアンテナ開口面での波源分布特性を、送信時には均一分布特性又は密度テーパ分布特性に切換え、受信時には均一分布特性又は振幅テーパ分布特性に切換える。
(もっと読む)
目標検出装置
【課題】長パルス信号波による受信障害を回避することができる目標検出装置を提供すること。
【解決手段】短パルス信号を送信し、目標における前記短パルス信号の反射により生じた第1の信号が受信された時点を前記目標との距離として識別する第1の識別手段と、前記短パルス信号よりパルス幅が長い長パルス信号を前記短パルス信号の後に送信し、前記目標における前記長パルス信号の反射により生じた第2の信号のパルス幅を圧縮することにより、前記目標を識別する第2の識別手段とを備えた目標検出装置において、前記第2の識別手段は、前記第1の信号が受信された時点が早いほど、前記長パルス信号の送信電力を小さな値に設定することによって構成される。
(もっと読む)
測角処理装置
【課題】レドームの影響等を受けつつ広角方向から到来する信号を測角対象範囲外として除去するとともに、測角対象範囲内の到来信号に対して良好な測角結果を得る。
【解決手段】インターフェロメータ方式を用いた測角処理装置において、レドームが装着された空中線本体の複数のアンテナ素子で受信した受信信号の受信振幅をそれぞれに取得し、これら受信振幅相互間の最大振幅差を算出する。そして、この最大振幅差を、あらかじめ設定されたしきい値と比較し、しきい値を超えない受信信号に対しては、レドームによる影響等の少ない正面方向寄りの角度範囲からの到来信号としてインターフェロメータ方式による測角を行うとともに、しきい値を超えた受信信号は、レドームによる影響等の大きい広角方向寄りの角度範囲から到来したものとして棄却する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 ビート信号の高調波に起因する目標物体の誤検出を回避し、かつビート信号のレベルが低い目標物体の検出漏れを回避する。
【解決手段】信号処理装置は、CW期間におけるビート信号のレベルを、前記ビート信号をA/D変換する受信回路の飽和レベルより低いレベルに低下させる信号レベル制御手段を有するので、CW期間では高調波に起因する誤検出が生じない。そして、距離・速度検出手段は、CW期間で検出した相対速度に基づいてFMCW期間での相対速度及び相対距離から目標物体の相対速度及び相対距離を検出するので、FMCW期間で高調波に起因する誤検出を回避し、さらにビート信号のレベルが低い目標物体の検出漏れを回避できる。
(もっと読む)
電波式アクティブセンサ
【課題】電波式アクティブセンサにおいて、外装ケースの厚みや設置距離が低い精度であっても電波が大きく減衰することがなく、センサ性能の低下が生じない。
【解決手段】アクティブセンサは、予め記憶している複数のテスト周波数の中から1つの周波数を読出し(S1)、その周波数で送信アンテナから電波を送信すると共に受信電波を受信する(S2)。そして、対象物を検知しない時間帯においてのみ受信電波の受信レベルを読み込み(S3)、読み込んだ受信レベルの平均値を記憶する(S4)。全てのテスト周波数についてS1からS4の工程を繰り返した後(S5でYES)、受信レベルの平均値が最も大きいときのテスト周波数を動作周波数として選択する(S6)。以後、選択した周波数でもって検知動作を行う。これにより、外装ケースの厚みや設置距離の精度が低くても、外装ケースによって電波が大きく減衰することがなく、センサ性能の低下が生じない。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
レーダ装置
【課題】高速処理を行わずにコストを抑制し、送受信共用アンテナにより近距離から遠距離までの検知距離性能を可能とするレーダ装置を提供する。
【解決手段】本願発明のレーダ装置は、送受共用アンテナと、三角波変調された送信波を出力する発振器と、送信波を第1及び第2送信波に分配する分配器と、第1送信波を送受共用アンテナに出力し、第1送信波が目標物体により反射された反射波を入力するサーキュレータと、分配器及びサーキュレータの間の接続をオンオフするスイッチと、反射波及び第2送信波をミキシングしてビート信号を生成するミキサーと、ビート信号から目標物体を検出する第1及び第2目標検出部と、第1または第2目標検出部のいずれかに、ミキサーからのビート信号を入力させる切替スイッチと、切替スイッチの切り替えタイミングにより、第1目標検出部または第2目標検出部からの目標物体の検出結果を合成する物体合成部とを有する。
(もっと読む)
携帯型リーダライタ
【課題】見えない場所にあるRFタグであっても、その位置を十分な確かさで検出する。
【解決手段】携帯型リーダライタ3は、本体4内に多軸(6軸)の加速度センサを備え、制御部は、原点位置を基準として常に本体4の三次元方向の位置及び指向方向を検出できる。既知の基準位置に配置された基準RFタグ14を原点位置から読取り、その際の本体4の位置及び指向方向からなる原点位置情報をメモリに記憶させる。その後は、ユーザが、複数のRFタグ2が存在すると思われる範囲を掃引するように本体4を手動で移動させデータを読取る掃引読取動作を行い、その際の本体4の位置及び指向方向から、各RFタグ2の配置位置を判断し、各RFタグ2のデータと共にメモリに記憶する。
(もっと読む)
無線タグ距離測定装置
【課題】無線タグ距離測定システムにおいて、複数の無線タグから送信される応答信号の干渉を回避すること、および距離測定精度を向上させることを目的とする。
【解決手段】無線タグ距離測定装置10は、距離測定対象の無線タグの固有割り当てPN符号に応じて値が変化するPN信号を生成し、さらにPN信号に基準正弦波信号を乗じた正弦波PN信号を生成する。そして、正弦波PN信号を無線信号に変換した拡散パルス変調信号を送信する。無線タグ距離測定装置10は、無線タグによって拡散パルス変調信号に対して時間圧縮処理が施された圧縮パルス変調信号を受信する。無線タグ距離測定装置10は、正弦波PN信号を生成する元となった基準正弦波信号と、受信した圧縮パルス変調信号に含まれる基準正弦波信号との位相差に基づいて、無線タグまでの距離を算出する
(もっと読む)
レーダ断面積の測定装置及び方法並びにレーダ断面積の測定プログラム
【課題】近傍領域で測定した散乱電界の振幅情報のみから遠方領域のRCSを推定できるレーダ断面積の測定装置を得る。
【解決手段】水平方向において大きく、かつ垂直方向において水平方向に比べて小さい被測定物1を水平面で回転走査させる回転機構2と、被測定物1に電波を送信する送信アンテナ4と、被測定物1からの電波を受信する受信アンテナ5と、被測定物1から近傍領域内において被測定物1と送受信アンテナ4、5の間の距離が異なる3つの距離に送受信アンテナ4、5を水平方向に移動させる送受信アンテナ移動機構部7及び送受信アンテナ移動用レール8と、回転機構2、送受信アンテナ4、5、送受信アンテナ移動機構部7及び移動用レール8を駆動制御して遠方領域のRCSを求める制御ユニット100とを設け、制御ユニット100は、3つの異なる距離の近傍領域で測定した散乱電界の振幅情報のみから遠方領域のRCSを推定する手段を有する。
(もっと読む)
61 - 80 / 264
[ Back to top ]