
Fターム[5J070AK16]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | クラッタ消去 (225)
Fターム[5J070AK16]の下位に属するFターム
Fターム[5J070AK16]に分類される特許
101 - 120 / 151
飛しょう体誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由した信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタを追尾し、誤ロックすることがあった。
【解決手段】 従来は目標方向のみに電波を送信していたが、本方式では、目標方向及びクラッタ方向に角度を切換えながら電波を送信することで、目標方向及びクラッタ方向の2種類の受信信号を得ることができ、この2種類の受信信号を比較することでクラッタ信号を除去し、クラッタに誤ロックすることなく目標を正確な角度で追尾することが可能となる。
(もっと読む)
レーダ装置および類似装置

【課題】この発明の目的は、自船近傍であっても航跡記憶・表示の禁止を必要な領域でのみ行い、それ以外の領域では、レーダ映像と航跡とを同時に記憶・表示することができるレーダ装置および類似装置を提供することにある。
【解決手段】スイープ毎に受信データXのレベルに基づいて物標の有無を示す航跡用データWを生成する航跡用データ生成手段と、前記受信データXのレベルに基づいて航跡記憶禁止領域を設定する航跡記憶禁止領域設定手段と、前記航跡記憶禁止領域外で且つ物標有りの航跡用データWを検出した場合にのみ所定レベルからなる航跡記憶用データYを生成する航跡記憶用データ生成手段と、前記航跡記憶用データYを前記スイープの少なくとも一回転毎に更新記憶した航跡画像データを生成する航跡画像データ生成手段と、前記航跡画像データを読み出して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 ウェイト制御による時空間適応信号処理方式において、不要波方向を零にするためのウェイト算出に際し、実質的な精度を維持しつつ演算量を大幅に削減する。
【解決手段】 アダプティブアレーアンテナ21で得られたレーダパルスの目標反射信号を受信部22で受信検波し、データ蓄積部23に用意される処理レンジセルに対して受信タイミングに沿った対応セル位置に記憶する。時空間適応信号処理部27は、ウェイト算出回路271において、不要波のみから形成されると想定されるセルのデータから共分散行列を演算して適応ウェイトを求め、最終的に、ビーム合成回路272において、適応ウェイトによりアンテナ受信信号にウェイト制御を施して出力データとする。上記ウェイト算出回路271において、ウェイト算出の複数の処理ステージのうち、損失を考慮して複数飛び越して演算することで演算量を削減しウェイトを決定し、演算時間の高速化を図る。
(もっと読む)
レーダ信号処理装置
【課題】装置規模を増大させることなく、信号処理の演算負荷をより軽減した簡易な演算により不要波を効果的に抑圧するレーダ信号処理装置を得る。
【解決手段】レーダ反射波信号中のクラッタ等の不要波成分を抑圧する際に、レーダ覆域を分割した各セル毎に、反射波信号中に含まれるドップラ周波数成分を、反射波の位相回転量に対する平均値及び標準偏差といった、簡易かつ小規模な演算処理で結果を得ることのできる統計量を算出することによって求める。そして、これら統計量に基づいてノッチフィルタを形成し、このノッチフィルタを用いて反射波信号をフィルタリングすることにより不要波成分を抑圧する。
(もっと読む)
レーダ装置
【課題】一定誤警報確率で物標を探知するレーダ装置において、OS−CFARよりソート規模を小さくし、OS−CFARとほぼ同等の機能を実現するとともに、点在する物標と局在するクラッタを識別し、点在する物標のみを選択的に探知すること。
【解決手段】ブロックごとに平均して取り出したNb個の平均値を小さい順に並べ替え、その並べ替えた平均値の規定位置 (小さい順のm番目) の値をしきい値算出に用いて、
OS−CFARのしきい値とほぼ同様なしきい値を得る。
(もっと読む)
移動目標検出装置、移動目標検出方法および移動目標検出プログラム
【課題】SAR画像に対する移動目標検出処理において、信号レベルの高い移動目標以外の静止目標を除去し、移動目標の誤検出を減らすことを目的とする。
【解決手段】移動目標検出装置100は移動目標検出部150が抑圧比算出部152を備えることを特徴とする。画像差分処理部140は時刻tにレーダ観測された受信信号の振幅値を示すSAR画像Aと時刻t+Δtにレーダ観測された受信信号の振幅値を示すSAR画像Bとの振幅差を目標分布図として算出する。抑圧比算出部152は目標分布図をSAR画像AとSAR画像Bとのいずれかで除算した抑圧比を算出する。目標識別部153は抑圧比を閾値と比較して移動目標を検出する。移動目標検出装置100は抑圧比を閾値と比較することにより、目標分布図を閾値と比較するよりも容易に移動目標を検出することができ、移動目標の誤検出を減らすことができる。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由したマルチパス信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタまたはマルチパスを追尾し、誤ロックすることがあった。
【解決手段】 目標からの直接反射波はHH信号(水平偏波による送受信)とVV信号(垂直偏波による送受信)とで電力差がなく、マルチパス信号はHH信号とVV信号とで電力差が生じる。この電力差に基づき信号処理することにより、目標からの直接反射信号とマルチパス信号とを弁別し、弁別後の目標からの直接反射信号を用いて誘導処理を行う。
(もっと読む)
レーダ信号処理装置
【課題】クラッタおよび妨害を抑圧するとともに、メインローブを保持して高い抑圧性能を得ることができるレーダ信号処理装置を提供する。
【解決手段】主アンテナ11から出力される信号をビーム合成するビーム合成回路2と、ビーム合成回路の出力をフーリエ変換して主チャンネル信号を生成するフーリエ変換回路3と、補助アンテナ12から出力される補助チャンネル信号から、フーリエ変換回路から出力される信号の振幅および位相を、該補助チャンネル信号の振幅および位相に合わせた信号を減算する拘束付補助ビーム形成回路6と、拘束付補助ビーム形成回路から出力される信号を用いてタップドディレイラインによるアダプティブ処理を行うアダプティブ処理回路4と、主チャンネル信号から、アダプティブ処理がなされた信号を減算することにより主チャンネル信号に含まれる不要波を抑圧するキャンセル処理回路5を備える。
(もっと読む)
電波式物体検出装置
【課題】電波式物体検出装置において、クラッタ成分を有効に低減しつつ、ターゲットとなる物体の検出精度の向上を図る。
【解決手段】クラッタ処理部6は、受信アンテナ3bによって受信された受信信号と、受信信号中のクラッタ成分を除去する際の波形的な基準を与えるリファレンス信号との差分を算出することによって、クラッタ成分を除去した処理済受信信号を生成する。また、クラッタ処理部6は、ターゲットが存在しないときの受信信号をリファレンス信号として設定する。信号比較部7は、現在の処理済受信信号を過去の処理済受信信号と比較することによって、ターゲットの存在を検出する。
(もっと読む)
レーダ信号処理装置
【課題】クラッタおよび妨害を抑圧するとともに、メインローブを保持し、高い抑圧性能を得ることができるレーダ装置を提供する。
【解決手段】複数のアンテナ素子またはサブアレイを備えた主アンテナ11からの信号をビーム合成するビーム合成回路2と、ビーム合成回路の出力をフーリエ変換して主チャンネル信号を生成するフーリエ変換回路3と、複数のアンテナ素子またはサブアレイの一部または全部を共用して成る補助アンテナ12からの補助チャンネル信号のPRI単位またはレンジセル単位の信号を用いてタップドディレイラインによるアダプティブ処理を行うアダプティブ処理回路4と、フーリエ変換回路から送られてくる主チャンネル信号から、アダプティブ処理回路によってアダプティブ処理がなされた信号を減算することにより主チャンネル信号に含まれる不要波を抑圧するキャンセル処理回路5を備える。
(もっと読む)
レーダ装置とそのクラッタマップ圧縮方法
【課題】 ハードウェア規模を大きくすることなくクラッタマップを利用して目標を検出可能とする。
【解決手段】 MTI処理(15,16)の出力をDFT処理(17)して覆域内のクラッタ領域を示すクラッタマップを作成し(19)、データベースとしてマップメモリ20に保持する。目標検出時にマップメモリ20から圧縮されたクラッタマップを転送して展開し、MTI処理された信号の検出処理対象に対応する部位のしきい値を求め(12)、目標検出器(13,14)でしきい値とMTI処理された信号の振幅とを比較して目標を検出する。
(もっと読む)
無線周波数タグを識別するための方法及び装置
無線周波数識別データタグ及びタグを読み取るシステム及び方法が記述される。タグはタグによって保持されるデータを表す複数の回折要素を含む。回折要素は一つの軸に沿った回折要素の寸法が垂直軸に沿った要素の寸法と実質的に異なるような形状を有する。回折要素は所定のレイアウトスキームに従って行列内に配置される。各列において、回折要素は隣接する列内の要素の方向以外の方向を向く。タグの読み取りシステムは送信(Tx)アンテナのアレイと受信(Rx)アンテナのアレイとを含む。システムはRF送信信号を生成しデータ保持タグを読み取るためRF受信信号を処理するように構成されたインテロゲータユニットも含む。読み取りは列内のシンボル要素の配列を決定するための受信信号に基づくSAR画像の振幅情報、及び行内のシンボル要素の配列を決定するためのSAR画像の位相情報を用いて行なわれる。  (もっと読む)
(もっと読む)
レーダ装置および反射装置
【課題】コーナリフレクタ等の反射物が取り付けられた複数の目標物が存在する環境下、または目標物とそれ以外の物体が混在する環境下で、レーダ装置により各目標物を識別して測距を行う。
【解決手段】レーダ装置の送信手段101は、変動周波数またはドップラシフト周波数を示す起動情報を、反射装置の受信手段105に送信し、制御手段101は、起動情報に従って反射手段104の動作を制御する。これにより、反射手段104の反射断面積が上記変動周波数で変化する。あるいは、反射手段104は、上記ドップラシフト周波数のドップラシフトを伴う反射波を発生する。レーダ手段102は、反射装置に電磁波を放射し、反射波を受信する。位置検出手段103は、複数の受信波を分析して、上記変動周波数で変化する反射波、あるいは上記ドップラシフトを伴う反射波を抽出し、その反射波から得られた相対距離を反射装置の位置情報として出力する。
(もっと読む)
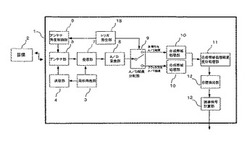
パルスレーダ装置
【課題】時間差分を求める際の時間差を調節することによって、所望の対象物の移動速度に応じた効率の良い検出方法を提供することができるパルスレーダ装置を提供する。
【解決手段】パルス状の電波を対象物に向けて送信する送信部1と、この送信部1を間欠送信する際の時間間隔を制御するパルス制御部2と、対象物からの反射波を受信アンテナ3で受信する受信部4と、受信部4からの受信信号の波形を複数蓄積する履歴蓄積部5と、履歴蓄積部5からの複数の履歴信号を用いて受信信号との差分を求める差分演算部6と、差分演算部6から得られる差分信号の波形立ち上がりタイミングを検出する検出部7と、パルス制御部2からの制御信号と検出部からの検出信号を用いて移動成分の距離を求める距離演算部8と、を設けた。
(もっと読む)
合成開口レーダの画像処理装置及び方法
【課題】 物標を捜索する合成開口レーダにおいて、限られた画素サイズのディスプレイで広域を監視するために、低分解能で画像化した場合でも、高分解能時と同じ小物標探知能力を実現する合成開口レーダの画像処理装置及び方法を提供することにある。
【解決手段】 高分解能処理部1で、小物標4に匹敵するか、若しくはさらに小さい領域まで高分解能処理を実施して、小物標がもつ情報を取得する。次に、最大値フィルタ処理部2で、前記高分解能処理で得られた小物標の情報を、低分解能処理上の1ピクセルに最大値で展開する。そして表示部3で、低分解能処理上の最小領域を1ピクセルとして画面表示する。以上のように、小物標が本来もつ情報を損なうことなく表示可能であるため、背景の情報との識別が容易となり、レーダとしての探知能力を向上させることができる。
(もっと読む)
飛しょう体の誘導装置
【課題】 飛しょう体の誘導装置において、目標に向けて電波を照射し捜索を開始する際に、内部の計算において海面および地面の反射電力(クラッタ電力)を一定として計算しているため、海面および地面の状況によってはクラッタ電力が少なく目標を探知する余裕が十分ある場合においても、捜索を開始せず目標の捜索を開始する距離が必要以上に短くなり、また、海面および地面の反射電力が大きい場合は目標捜索開始時に海面または地面に誤追尾してしまうという課題があった。
【解決手段】 誘導装置にクラッタ信号測定部を設け、実際に運用する環境下でのクラッタ電力を観測することにより、クラッタ電力計算部および捜索開始距離計算部で海面又は地面の状況に応じた捜索開始距離を算出することが可能とした。
(もっと読む)
MTI装置及びMTI処理方法
【課題】運用者の操作負担を軽減しつつ、消え残りクラッタ信号を低減することが可能なMTI装置及びMTI処理方法を提供する。
【解決手段】所定の処理周期毎に出力される複数のMTI信号をそれぞれ加算し、該複数のMTI信号の数で除算するスキャン積分処理を実施し、スキャン積分処理後の信号から所定のスレッシュホールドレベルを超える信号を消え残りクラッタ信号と判定する。そして、該消え残りクラッタ信号の計数結果である消え残りクラッタ信号数が所定の上限値以下となるように、マルチドップラフィルタ回路のフィルタ特性を変更するためのフィルタデータを生成し、マルチドップラフィルタ回路のフィルタ特性を変更する。
(もっと読む)
観測装置および観測装置の観測方法
【課題】PRIの自由度を高め観測幅を大きくできるようにすることで電波を用いた観測処理を支援する。
【解決手段】送信部120が直下方向からの反射波の受信タイミングを考慮せずにPRI毎に送信波を送信し受信部130が受信タイミングにアンテナ110に到達した反射波を受信する。次に、減衰タイミング算出部142が直下方向と観測装置100との距離に基づいて直下方向からの反射波の受信タイミングを算出し減衰用パルスを出力する。そして、減衰器141が、減衰用パルスの出力中は受信信号を大きく減衰することで、大きな電力を持つ直下方向からの反射波に重畳するメインローブからの反射波が信号の飽和により喪失することを防ぐ。次に、A/D変換器151が受信信号をA/D変換する。そして、有効ビット数切替器152が、減衰用パルスの出力中はA/D変換の有効ビット数を大きくし分解能を上げ、減衰用パルスの無出力中はA/D変換の有効ビット数を小さくしデータ量を抑える。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
レーダ観測システムとそのパラメータ最適化方法
【課題】 MTI調整において、最適な信号処理パラメータを迅速に導出可能にする。
【解決手段】 パラメータ自動設定部12とレーダ観測データ蓄積部14を用いて、オンライン状態で短時間に設定パラメータを複数回変更して、それぞれの観測データを時刻管理して蓄積しておき、オフライン状態で、保存した評価用データとパラメータ設定情報を選択的に読み出して複数のパラメータそれぞれの評価を行い、その評価結果を比較することで最適な信号処理パラメータを導出するようにし、MTI調整において、複数回のパラメータ変更とその評価処理を切り分けて処理する。
(もっと読む)
101 - 120 / 151
[ Back to top ]